1. 你得有一个仿真机械臂
简单地说你首先的拥有一个能够在Gazebo当中使用的机械臂的URDF文件,必须要包含visual、collision和inertial三大标签。出于个人习惯,这里直接使用UR官方提供的UR5的URDF文件,具体怎么下载,请自行百度
这里建议新建一个功能包用于存放UR5的相关文件,因为官方功能包ur_description里面除了UR5的URDF文件之外,还有其它机械臂的文件,显得特别混乱。
你的功能包应该包含以下文件:
你的功能包:
meshes:
collision
visual
urdf:
common.gazebo.xacro
ur.gazebo.xacro
ur.transmission.xacro
ur5.urdf.xacro
ur5_robot.urdf.xacro
launch:
ur5_upload.launch
view_ur5.launch
config:
view_robot.rviz
这些文件你都可以在对应的官方文档中找到,将其直接拷贝即可。其中meshes文件夹下的collision和visual两个文件夹都是储存UR5的三维模型文件的,你可以在官方功能包ur_description/meshes/ur5下找到这两个文件夹。
(1)common.gazebo.xacro && ur.gazebo.xacro && ur.transmission.xacro:
通用文件,第一个导入Gazebo/roscontrol插件,后续给机械臂发送控制指令是通过roscontrol来完成。第二个配置了机械臂在Gazebo当中的一些仿真设置,设置了自碰撞为true。第三个配置了哪些关节需要传动,以及使用何种模拟的硬件接口,这里的模拟硬件接口就好比实际的机械臂是使用位置控制还是力矩控制,这个文件将硬件接口使用了参数${hw_interface}来表示,后续再传参进行设置。
(2)ur5.urdf.xacro:
ur5本体模型文件。
(3)ur5_robot.urdf.xacro:
将上述文件全部串起来的一个总文件,在该文件中设置了刚刚上述所说的${hw_interface}参数,如下代码:
<xacro:arg name="transmission_hw_interface" default="hardware_interface/PositionJointInterface"/>
<xacro:ur5_robot prefix="" joint_limited="false"
transmission_hw_interface="$(arg transmission_hw_interface)"
/>
建议将default="hardware_interface/PositionJointInterface"修改为default="PositionJointInterface",原因不知,但我不修改它就报错。
(4)ur5_upload.launch:
将ur5_robot.urdf.xacro模型文件作为参数robot_description上传至参数服务器,Gazebo和rviz都是通过参数服务器中的robot_description参数来识别机器人模型。注意把里面的hardware_interface/PositionJointInterface通通改成PositionJointInterface。
(5)view_ur5.launch:
在rviz中显示ur5。每次打开Gazebo比较耗时,如果仅仅只是查看装配关系以及坐标轴方向的话推荐使用rviz,后面需要自己在ur5末端装配一个力传感器,所以需要频繁使用这个文件来查看传感器的装配是否正确。
(6)view_robot.rviz:
rviz的设置文件,在view_ur5.launch中被导入。
2.你得有一个力传感器并把它装上去
首先,你可以在你的功能下的urdf文件夹中新建一个名为ft_sensor.xacro的文件,用于建立你自己的力传感器模型,你可以在三维绘图软件中绘制并导出stl文件加入到urdf文件中,不过我为了偷懒直接建立了一个圆柱当成了力传感器,代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ft_sensor">
<link name="ft_sensor">
<visual>
<geometry>
<cylinder radius="0.0375" length="0.01"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.5708 0.0 0.0"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.0375" length="0.01"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.5708 0.0 0.0"/>
</collision>
<inertial>
<mass value="0.01"/>
<inertia ixx="7.1441E-05"
ixy="1.6499E-08"
ixz="-4.9269E-09"
iyy="7.146E-05"
iyz="-8.5336E-09"
izz="0.00013366"/>
</inertial>
</link>
<joint name="ft_sensor_joint" type="fixed">
<origin xyz="0.0 0.0873 0.0" rpy="0.0 0.0 0.0"/>
<parent link="wrist_3_link"/>
<child link="ft_sensor"/>
<axis xyz="0.0 0.0 0.0"/>
<limit lower="0.0" upper="0.0" effort="0.0" velocity="0.0"/>
</joint>
</robot>
<link>标签就是传感器本体,就是一个小圆柱,<joint>标签将这个传感器固连到了机械臂末端,就是wrist_3_link这个连杆之后。
不过,这还没完,这里仅仅是添加了一个传感器的三为模型,还没有为其赋予传感器的功能,因此,在你的功能包的urdf下新建一个文件夹名为sensor,专门用于给传感器赋予功能的文件夹,在此之下新建一个ft_sensor_config.xacro文件,代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ft_sensor_config">
<!-- Enable the Joint Feedback -->
<gazebo reference="ft_sensor_joint">
<provideFeedback>true</provideFeedback>
<disableFixedJointLumping>true</disableFixedJointLumping>
</gazebo>
<!-- The ft_sensor plugin -->
<gazebo>
<plugin name="ft_sensor" filename="libgazebo_ros_ft_sensor.so">
<updateRate>100.0</updateRate>
<topicName>ft_sensor_topic</topicName>
<jointName>ft_sensor_joint</jointName>
</plugin>
</gazebo>
</robot>
关键部分是以下这一段:
<gazebo>
<plugin name="ft_sensor" filename="libgazebo_ros_ft_sensor.so">
<updateRate>100.0</updateRate>
<topicName>ft_sensor_topic</topicName>
<jointName>ft_sensor_joint</jointName>
</plugin>
</gazebo>
首先要导入Gazebo力传感器的插件,可以理解为导入力传感器仿真实现的源码,<uprate>标签是反馈频率,<topicName>标签是发布的话题,即启动Gazebo后会在ft_sensor_topic话题下以1秒钟100次的频率发布传感器数据。<jointName>标签很关键,就是这个传感器设置在哪个关节上,注意个人认为这个Gazebo的一个bug,只能将力传感器放置在关节上,因此这个的关节我们就选择在传感器的模型文件中的ft_sensor_joint关节即可。
完成以上,将上述新建的两个文件通过在ur5_robot.urdf.xacro加入以下代码和之前的所有urdf文件进行汇总。
<!-- ft_sensor -->
<xacro:include filename="$(find Robot_ft_sensor_Description)/urdf/ft_sensor.xacro" />
<xacro:include filename="$(find Robot_ft_sensor_Description)/urdf/sensor/ft_sensor_config.xacro"/>
现在,你就可以启动view_ur5.launch文件看到你的传感器了,如图。

红色的这个就是传感器,准确地讲,连接红色圆柱的关节才是传感器,绿色的是传感器的Y轴方向,蓝色是Z轴方向,红色是X轴方向,这个坐标轴方向很重要。
3.你可以启动Gazebo了
新建一个新的功能包用于存放Gazebo相关文件,如下,和上述的功能包一样,你可以直接从官方文档拷贝。
你的功能包:
controller:
joint_state_controller.yaml
robot_controller.yaml
launch:
controller_utils.launch
ur5.launch
(1)joint_state_controller.yaml && robot_controller.yaml:
roscontrol的配置文件,前者配置了一个反馈机械臂关节角度的控制器,后者则是控制机械臂六个关节的控制器,后者代码为以下:
robot_controller:
type: position_controllers/JointGroupPositionController
joints:
- shoulder_pan_joint
- shoulder_lift_joint
- elbow_joint
- wrist_1_joint
- wrist_2_joint
- wrist_3_joint
这一个控制器就够使了,这个表示启动Gazebo后会有一个叫robot_controller/command的话题,直接王上面发送六个关节数据就可以控制机械臂运动了,注意这里使用的是position_controllers与上述的PositionJointInterface是对应的。
(2)controller_utils.launch:
通过joint_state_controller.yaml文件的设置启动了机械臂关节角度反馈的控制器。
(3)ur5.launch:
代码如下
<?xml version="1.0"?>
<launch>
<arg name="limited" default="false" doc="If true, limits joint range [-PI, PI] on all joints." />
<arg name="paused" default="false" doc="Starts gazebo in paused mode" />
<arg name="gui" default="true" doc="Starts gazebo gui" />
<!-- startup simulated world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<!-- <arg name="world_name" default="$(find RobotGazebo)/worlds/robot.world"/> -->
</include>
<!-- send robot urdf to param server -->
<include file="$(find Robot_ft_sensor_Description)/launch/ur5_upload.launch">
<arg name="limited" value="$(arg limited)"/>
</include>
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="spawn_gazebo_model" pkg="gazebo_ros" type="spawn_model" args="-urdf -param robot_description -model robot -z 0.85" respawn="false" output="screen" />
<include file="$(find Robot_ft_sensor_Gazebo)/launch/controller_utils.launch"/>
<!-- start this controller -->
<rosparam file="$(find Robot_ft_sensor_Gazebo)/controller/robot_controller.yaml" command="load"/>
<node name="robot_controller_spawner" pkg="controller_manager" type="spawner" args="robot_controller" output="screen"/>
</launch>
关键部分:
<!-- send robot urdf to param server -->
<include file="$(find Robot_ft_sensor_Description)/launch/ur5_upload.launch">
<arg name="limited" value="$(arg limited)"/>
</include>
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="spawn_gazebo_model" pkg="gazebo_ros" type="spawn_model" args="-urdf -param robot_description -model robot -z 0.85" respawn="false" output="screen" />
<include file="$(find Robot_ft_sensor_Gazebo)/launch/controller_utils.launch"/>
<!-- start this controller -->
<rosparam file="$(find Robot_ft_sensor_Gazebo)/controller/robot_controller.yaml" command="load"/>
<node name="robot_controller_spawner" pkg="controller_manager" type="spawner" args="robot_controller" output="screen"/>
第一段:引用之前的ur5_upload.launch文件,将模型文件作为参数robot_description上传至参数服务器。
第二段:告诉Gazebo从参数服务器的robot_description读取模型文件。
第三段:引入controller_utils.launch文件,启动机械臂关节角度反馈控制器。
第四段:读取robot_controller.yaml文件配置,启动我们自己设置的robot_controller控制器。
4.查看力传感器是否正常工作
启动ur5.launch文件,使用rostopic list命令,如图
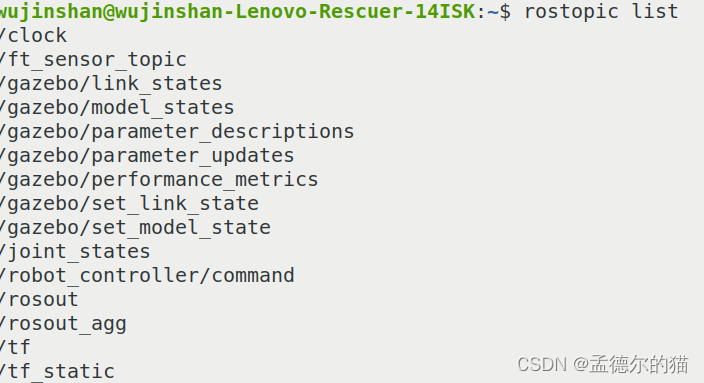
发现ft_sensor_topic和robot_controller/command两个话题如期出现,查看一下ft_sensor_topic如下。
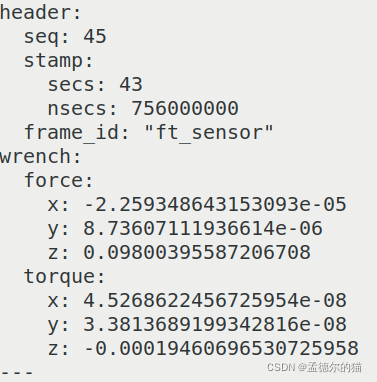
以上就是力传感器数据,注意貌似Z方向上力不为零,这是由于根据上述的力传感器坐标轴方向,Z方向会承受传感器本身的重力。
所有代码会在机械臂末端柔顺控制(Ros+Gazebo仿真实现)完成之后全部开源。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)