推荐一个自动控制小车开源项目:本文结合老王自动驾驶控制算法第五讲的离散LQR进行学习复盘
Inverted Pendulum Control — PythonRobotics documentation

-
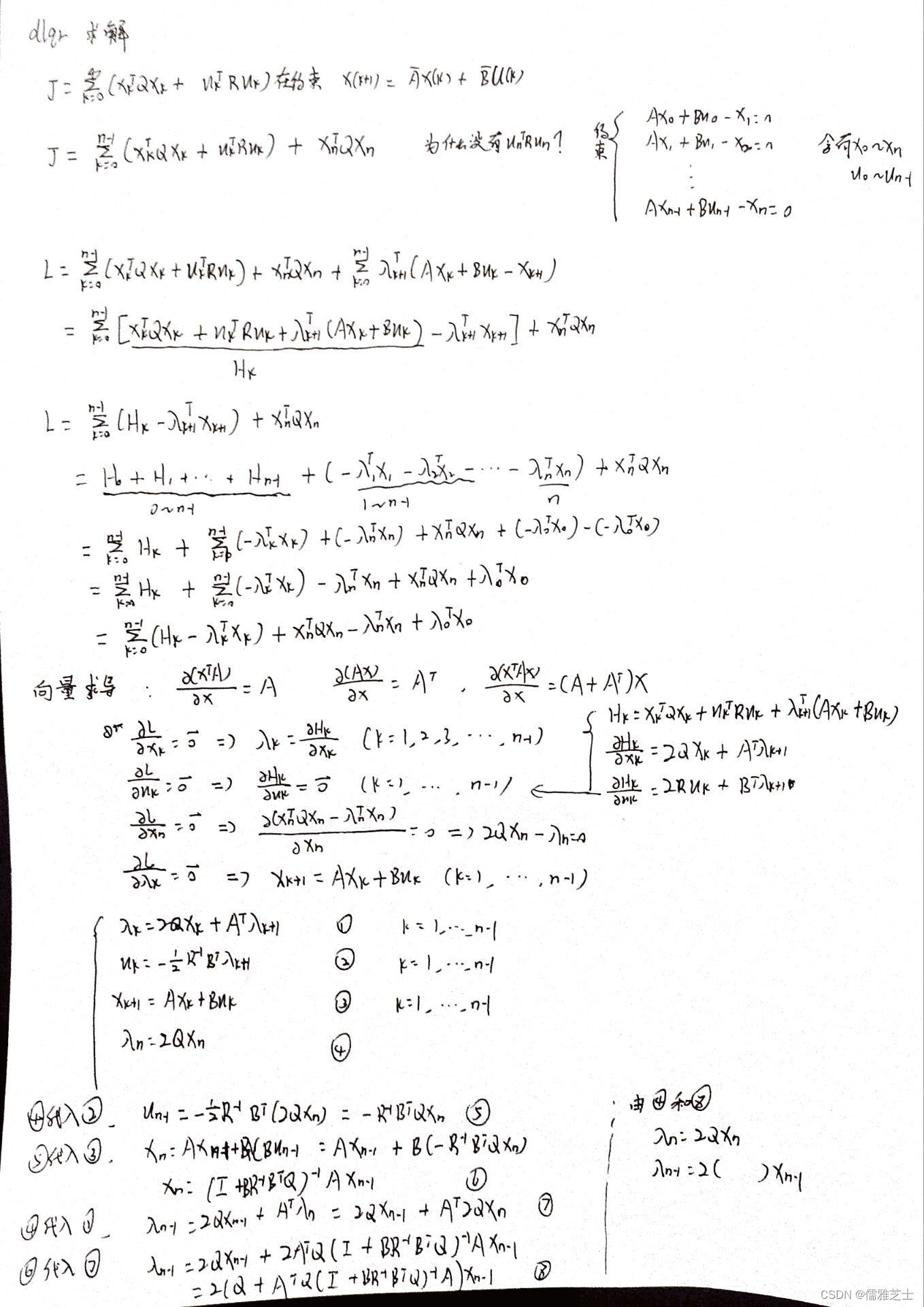
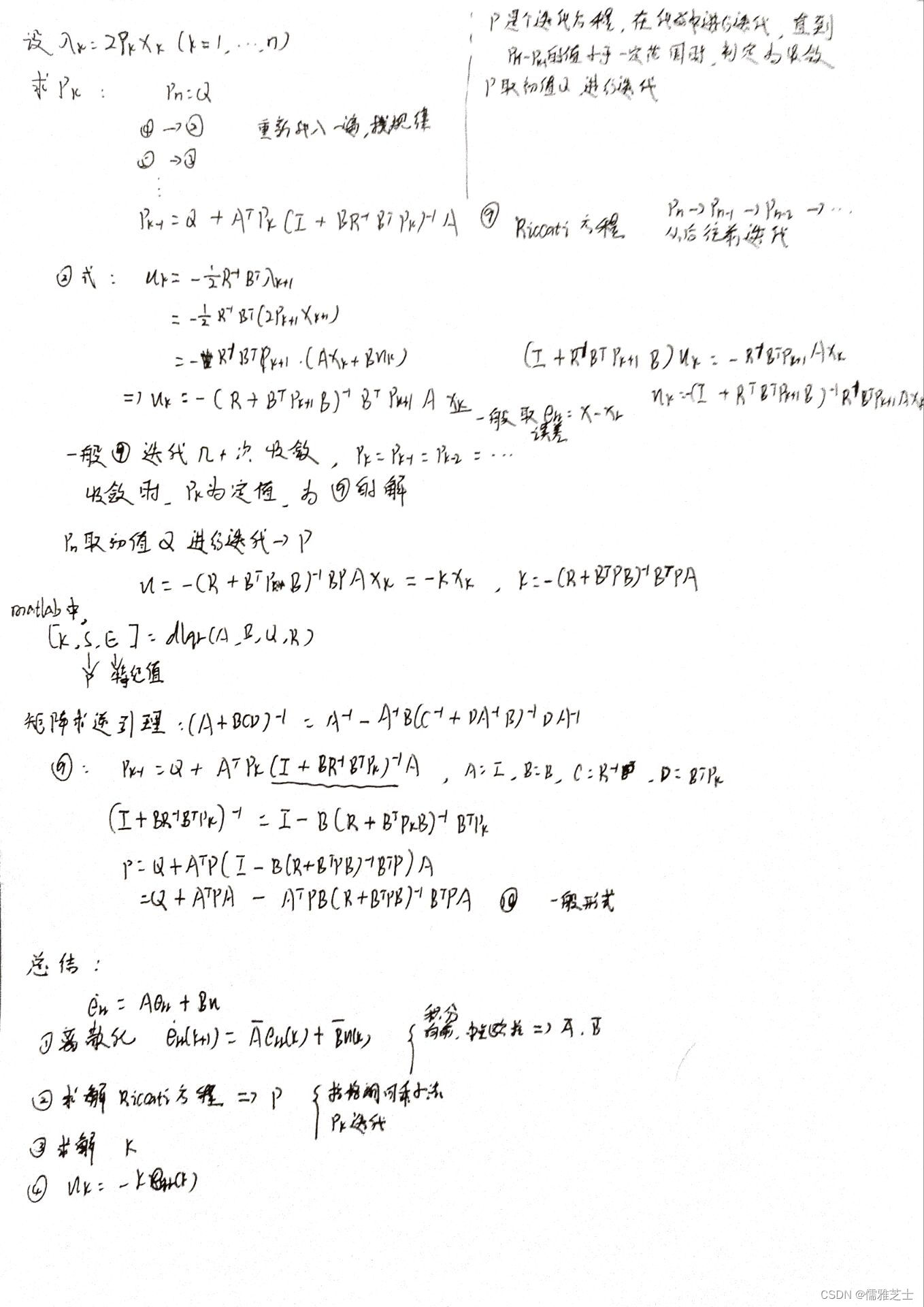
dlqr原理(老王的拉格朗日乘子法)


"""
Inverted Pendulum LQR control
author: Trung Kien - letrungkien.k53.hut@gmail.com
"""
import math
import time
import matplotlib.pyplot as plt
import numpy as np
from numpy.linalg import inv, eig
# Model parameters
l_bar = 2.0 # length of bar
M = 1.0 # [kg]
m = 0.3 # [kg]
g = 9.8 # [m/s^2]
nx = 4 # number of state
nu = 1 # number of input
Q = np.diag([0.0, 1.0, 1.0, 0.0]) # state cost matrix。返回所给元素组成的对角矩阵
R = np.diag([0.01]) # input cost matrix
delta_t = 0.1 # time tick [s]
sim_time = 5.0 # simulation time [s]
show_animation = True #一个为真的变量
## 1
def main():
# x=[x,dot_x,seta,dot_seita]
x0 = np.array([
[0.0],
[0.0],
[0.3],#倾斜角
[0.0]
])
# x = np.copy(x0)
x = x0
time = 0.0
while sim_time > time:
time += delta_t
# calc control input
u = lqr_control(x)#调用函数
# simulate inverted pendulum cart
x = simulation(x, u)#调用函数
if show_animation:
plt.clf()#Clear the current figure.清楚每一帧的动画
print("X[0]:",x[0])
# print("X:",x)
px = float(x[0])#将一个字符串或数字转换为浮点数。输出位置
theta = float(x[2])#输出角度
plot_cart(px, theta)#调用函数
plt.xlim([-5.0, 2.0])
plt.pause(0.001)#暂停间隔
print("Finish")
print(f"x={float(x[0]):.2f} [m] , theta={math.degrees(x[2]):.2f} [deg]")
if show_animation:
plt.show()
## 2
def simulation(x, u):
'''
调整X
'''
A, B = get_model_matrix()#调用函数,得到AB矩阵
x = A @ x + B @ u#矩阵乘法,必须声明numpy
return x
## 3
def solve_DARE(A, B, Q, R, maxiter=150, eps=0.01):
"""
Solve a discrete time_Algebraic Riccati equation (DARE)求得离散时间黎卡提方程的解 矩阵P
"""
P = Q#初始化
for i in range(maxiter):
#矩阵P进行迭代,4×4的矩阵
Pn = A.T @ P @ A - A.T @ P @ B @ inv(R + B.T @ P @ B) @ B.T @ P @ A + Q
# print("Pn:",Pn)
#矩阵P收敛时,退出迭代循环
# print("abs(Pn - P).max:",abs(Pn - P).max(),i)
# print("Pn - P:",Pn - P,i)
if (abs(Pn - P)).max() < eps:
break
P = Pn
return Pn#收敛的矩阵P
# P = Q
# for i in range(50):
# Pn = A.T @ P @ A - A.T @ P @ B @ inv(R + B.T @ P @ B ) @ B.T @ P @ A +Q
# # print("Pn:",Pn)
# # print("P:",P)
# if (abs(Pn - P)).max() < 0.01:
# break
# return Pn
## 4
def dlqr(A, B, Q, R):
"""
Solve the discrete time lqr controller.
x[k+1] = A x[k] + B u[k]
cost = sum x[k].T*Q*x[k] + u[k].T*R*u[k]
# ref Bertsekas, p.151
"""
# first, try to solve the ricatti equation
#先求解迭代后收敛的矩阵P
P = solve_DARE(A, B, Q, R)
# compute the LQR gain
#计算矩阵K,u=-KX
K = inv(B.T @ P @ B + R) @ (B.T @ P @ A)#u=-kx的k
eigVals, eigVecs = eig(A - B @ K)#计算方阵的特征值和右特征向量
return K, P, eigVals
## 5
def lqr_control(x):
'''
得到输入u
'''
A, B = get_model_matrix()
start = time.time()
K, _, _ = dlqr(A, B, Q, R)
u = -K @ x
elapsed_time = time.time() - start
print(f"calc time:{elapsed_time:.6f} [sec]")
return u#返回输入u
## 6
def get_numpy_array_from_matrix(x):
"""
get build-in list from matrix,将多维数组降为一维
"""
return np.array(x).flatten()#将多维数组降为一维
## 7
def get_model_matrix():
'''
更新离散过程中的矩阵A、B
'''
A = np.array([
[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, m * g / M, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, 0.0, g * (M + m) / (l_bar * M), 0.0]
])
# A = np.eye(nx) + delta_t * A#单位矩阵+△t*A,收敛速度慢
A = inv(np.eye(4) - A *1/2 * delta_t) @ (np.eye(4) + A *1/2 * delta_t)#收敛更快
B = np.array([
[0.0],
[1.0 / M],
[0.0],
[1.0 / (l_bar * M)]
])
B = delta_t * B
return A, B
## 8
def flatten(a):
"""
将多维数组降为一维
"""
return np.array(a).flatten()
## 9
def plot_cart(xt, theta):#xt:小球位置
"""
画图
"""
cart_w = 1.0#马车宽
cart_h = 0.5#马车高
radius = 0.1#马车轮半径
cx = np.array([-cart_w / 2.0, cart_w / 2.0, cart_w /2.0, -cart_w / 2.0, -cart_w / 2.0])#马车顶点x坐标矩阵,闭合图形的顶点
cy = np.array([0.0, 0.0, cart_h, cart_h, 0.0])#马车顶点y坐标
cy += radius * 2.0#加轮高
cx = cx + xt#调整马车位置,以球心坐标为基点变化
bx = np.array([0.0, l_bar * math.sin(-theta)])#球心的x坐标
bx += xt
by = np.array([cart_h, l_bar * math.cos(-theta) + cart_h])#球心的y坐标
by += radius * 2.0
##画车轮的圆
#np.arange返回一个有终点和起点的固定步长的排列,第一个参数为起点,第二个参数为终点,第三个参数为步长
angles = np.arange(0.0, math.pi * 2.0, math.radians(3.0))#math.radians()返回弧度制。离散化
#每一步的x、y随球的旋转弧度变化
ox = np.array([radius * math.cos(a) for a in angles])#np.array()的作用就是按照一定要求将object转换为数组
oy = np.array([radius * math.sin(a) for a in angles])
#右轮
rwx = np.copy(ox) + cart_w / 4.0 + xt#右轮位置 = 离散矩阵 + 0.25 + 球位置
rwy = np.copy(oy) + radius#离散矩阵
#左轮
lwx = np.copy(ox) - cart_w / 4.0 + xt
lwy = np.copy(oy) + radius
##画球
wx = np.copy(ox) + bx[-1]
wy = np.copy(oy) + by[-1]
plt.plot(flatten(cx), flatten(cy), "-b")#马车
plt.plot(flatten(bx), flatten(by), "-k")#摆杆
plt.plot(flatten(rwx), flatten(rwy), "-k")#右轮
plt.plot(flatten(lwx), flatten(lwy), "-k")#左球
plt.plot(flatten(wx), flatten(wy), "-k")#球
plt.title(f"x: {xt:.2f} , theta: {math.degrees(theta):.2f}")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect(
'key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.axis("equal")
if __name__ == '__main__':
main()
自己根据老王的dlqr推导过程,仿着开源代码修改了自己的代码,由于开源代码有些地方较为冗长,自己在函数顺序方面做了改进,图像plot部分未做修改
import math
import time
import matplotlib.pyplot as plt
import numpy as np
from numpy.linalg import inv, eig
l_bar = 2.0 # length of bar
M = 1.0 # [kg]
m = 0.3 # [kg]
g = 9.8 # [m/s^2]
nx = 4 # number of state
nu = 1 # number of input
Q = np.diag([0.0, 1.0, 1.0, 0.0]) # state cost matrix。返回所给元素组成的对角矩阵
R = np.diag([0.01]) # input cost matrix
delta_t = 0.1 # time tick [s]
sim_time = 5.0 # simulation time [s]
show_animation = True #一个为真的变量
#主函数√
def main():
time = 0.0
X0 = np.array([
[0.0],
[0.0],
[0.3],
[0.0]
])
X = X0
while sim_time > time:
time += delta_t
A,B = get_A_B()
P = get_P(A,B,R,Q)
K = get_K(A,B,R,P)
u = get_u(K, X)
X = A @ X + B @ u
if show_animation:
plt.clf()#Clear the current figure.清楚每一帧的动画
px = float(X[0])#将一个字符串或数字转换为浮点数。输出位置
theta = float(X[2])#输出角度
plot_cart(px, theta)#调用函数
plt.xlim([-5.0, 5.0])
plt.pause(0.001)#暂停间隔
print("Finish")
print(f"x={float(X[0]):.2f} [m] , theta={math.degrees(X[2]):.2f} [deg]")
if show_animation:
plt.show()
#获取p矩阵√
def get_P(A,B,R,Q):
P = Q
# Pn = A.T @ P @ A - A.T @ P @ B @ inv(R + B.T @ P @ B ) @ B.T @ P @ A +Q
# print("Pn:",Pn)
for i in range(150):
Pn = A.T @ P @ A - A.T @ P @ B @ inv(R + B.T @ P @ B ) @ B.T @ P @ A +Q
# print("Pn:",Pn)
# print("P:",P)
if (abs(Pn - P)).max()< 0.01:
break
P = Pn
return Pn
#获取A,B√√√
def get_A_B():
A0 = np.array([
[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, m * g / M, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, 0.0, g * (M + m) / (l_bar * M), 0.0]
])
B0 = np.array([
[0.0],
[1.0 / M],
[0.0],
[1.0 / (l_bar * M)]
])
A = inv(np.eye(4) - A0 *1/2 * delta_t) @ (np.eye(4) + A0 *1/2 * delta_t)
B = B0 * delta_t
return A,B
#获取K矩阵
def get_K(A,B,R,P):
K = inv(B.T @ P @ B + R) @(B.T @ P @ A)
return K
# 获取输入u
def get_u(K, X):
u = -1 * K @ X
return u
## 8
def flatten(a):
"""
将多维数组降为一维
"""
return np.array(a).flatten()
def plot_cart(xt, theta):
"""
画图
"""
cart_w = 1.0
cart_h = 0.5
radius = 0.1
cx = np.array([-cart_w / 2.0, cart_w / 2.0, cart_w /
2.0, -cart_w / 2.0, -cart_w / 2.0])
cy = np.array([0.0, 0.0, cart_h, cart_h, 0.0])
cy += radius * 2.0
cx = cx + xt
bx = np.array([0.0, l_bar * math.sin(-theta)])
bx += xt
by = np.array([cart_h, l_bar * math.cos(-theta) + cart_h])
by += radius * 2.0
angles = np.arange(0.0, math.pi * 2.0, math.radians(3.0))
ox = np.array([radius * math.cos(a) for a in angles])
oy = np.array([radius * math.sin(a) for a in angles])
rwx = np.copy(ox) + cart_w / 4.0 + xt
rwy = np.copy(oy) + radius
lwx = np.copy(ox) - cart_w / 4.0 + xt
lwy = np.copy(oy) + radius
wx = np.copy(ox) + bx[-1]
wy = np.copy(oy) + by[-1]
plt.plot(flatten(cx), flatten(cy), "-b")
plt.plot(flatten(bx), flatten(by), "-k")
plt.plot(flatten(rwx), flatten(rwy), "-k")
plt.plot(flatten(lwx), flatten(lwy), "-k")
plt.plot(flatten(wx), flatten(wy), "-k")
plt.title(f"x: {xt:.2f} , theta: {math.degrees(theta):.2f}")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect(
'key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.axis("equal")
if __name__ == '__main__':
main()
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)