lio-sam做的是scan-map,点变到世界系下,优化本帧在是世界系下的位姿,和loam有所不同。
符号:
本帧特征点云(相对机体系)
P
s
c
a
n
l
i
d
a
r
P_{scan}^{lidar}
Pscanlidar , 本帧点云变换至世界系
P
s
c
a
n
P_{scan}
Pscan,局部地图中匹配的点云
P
m
a
p
P_{map}
Pmap(世界系),位姿
X
=
{
R
,
T
}
X=\{R,T\}
X={R,T},点到对应线、面的距离残差
f
(
X
)
f(X)
f(X),围绕机体
x
x
x轴旋转的角度为
r
x
rx
rx,
s
i
n
(
r
x
)
、
c
o
s
(
r
x
)
sin(rx)、cos(rx)
sin(rx)、cos(rx)记作
s
x
、
c
x
s_x、c_x
sx、cx,其他轴同理。
坐标变换关系:

待优化的误差函数:
其实没有
P
m
a
p
P_{map}
Pmap这个点,误差函数是点到线、面的距离,这里认为
P
m
a
p
P_{map}
Pmap是线、面上垂直
P
s
c
a
n
P_{scan}
Pscan的点(后面和
P
m
a
p
P_{map}
Pmap没有关系)。
(打错了,是
f
=
d
i
s
t
(
P
s
c
a
n
,
P
m
a
p
)
f=dist(P_{scan},P_{map})
f=dist(Pscan,Pmap) )

误差函数的雅可比
J
J
J

1、分步求导第一项:
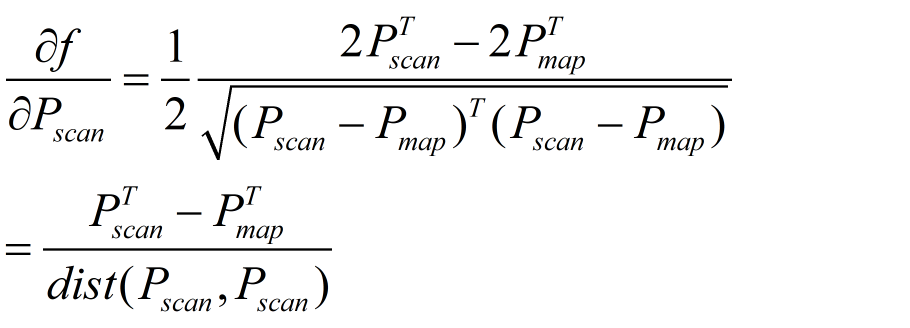
即为特征点到对应线面的距离的单位向量
[
l
a
,
l
b
,
l
c
]
[la,lb,lc]
[la,lb,lc](行向量),在求误差
f
f
f时,便已经得到,存放在coeff.xyz中。
2、分步求导第二项:
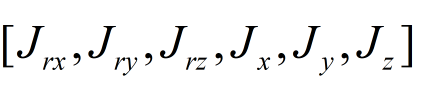
(应该是
[
r
x
,
r
y
,
r
z
,
x
,
y
,
z
]
[rx,ry,rz,x,y,z]
[rx,ry,rz,x,y,z],下面写法括号里的
T
T
T不该带转置的)

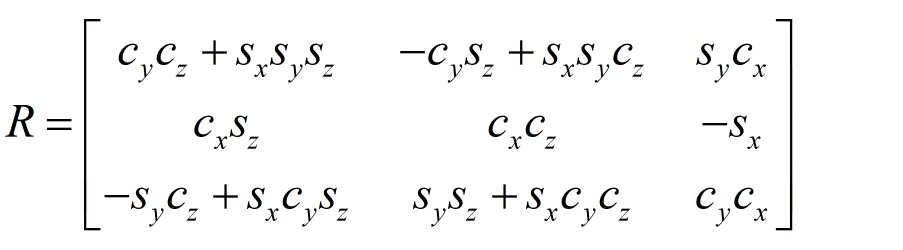
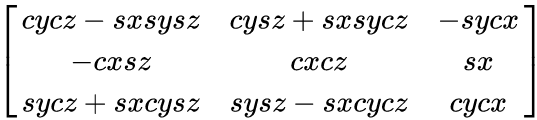
R
R
R是机体在世界系下的位姿,先围绕
z
z
z轴旋转的角度为
r
z
rz
rz,后围绕
x
x
x轴旋转的角度为
r
x
rx
rx,最后围绕
y
y
y轴旋转的角度为
r
y
ry
ry,
R
=
R
y
R
x
R
z
R=RyRxRz
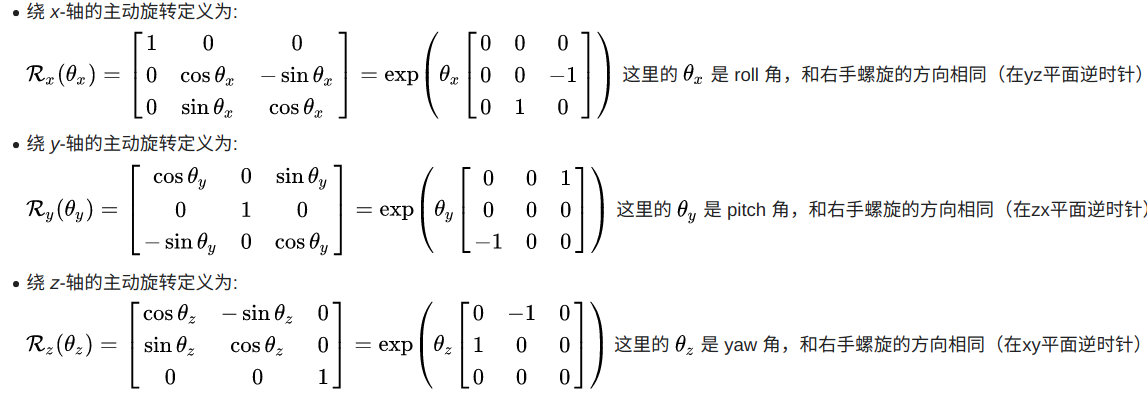
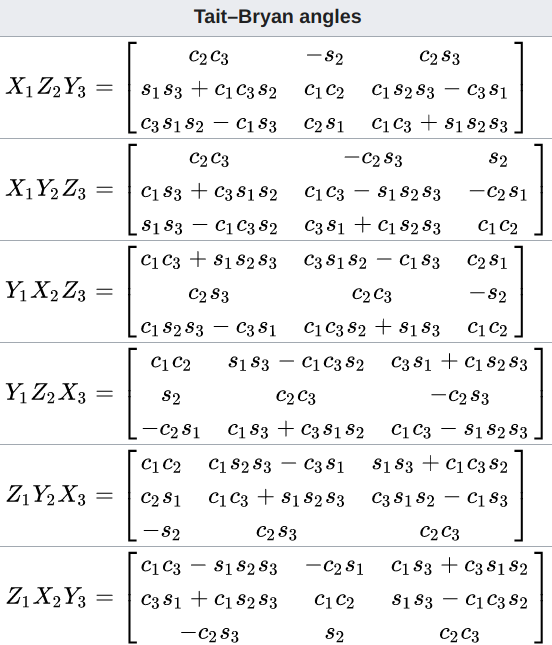
R=RyRxRz, 表示为(推导过程可以见附录中wiki截图):
2.1 我们先只看对
r
x
rx
rx的求导部分:
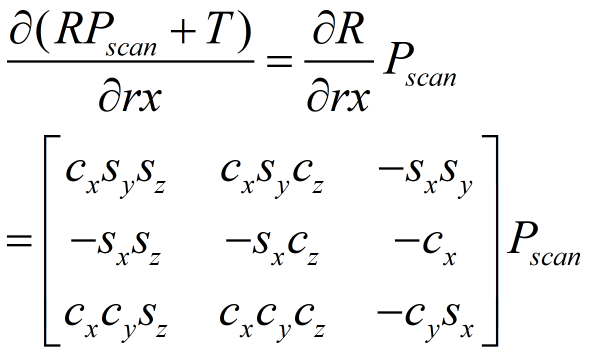
其中,
P
s
c
a
n
P_{scan}
Pscan即点的坐标,存储在pointOri.xyz,这一块的雅可比为:

对应代码中的:
float arx = (crx*sry*srz*pointOri.x + crx * crz*sry*pointOri.y - srx * sry*pointOri.z) * coeff.x
+ (-srx * srz*pointOri.x - crz * srx*pointOri.y - crx * pointOri.z) * coeff.y
+ (crx*cry*srz*pointOri.x + crx * cry*crz*pointOri.y - cry * srx*pointOri.z) * coeff.z;
2.2
r
y
,
r
z
ry,rz
ry,rz略过,对
T
T
T的求导部分为:
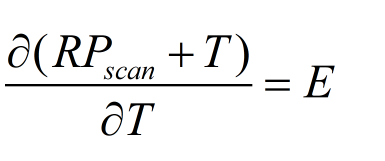
这一块的雅可比为:

对应代码中的:
matA(i, 3) = coeff.x;
matA(i, 4) = coeff.y;
matA(i, 5) = coeff.z;
3、最后把3个旋转,和T(x,y,z)的雅可比拼凑起来,就得到该特征点对应到1X6的雅可比矩阵:
附录:
参考1 2 3;
和参考123有些差异的地方,其中的
R
R
R如下,为啥差着负号,还没搞懂,没看过loam源码,估计是优化的R和计算误差时用的R是逆的关系,优化用
R
t
−
1
t
R_{t-1}^t
Rt−1t,误差函数是当前帧点变到上一帧
R
t
t
−
1
R_{t}^{t-1}
Rtt−1,但最后优化结果直接加在
R
t
−
1
w
o
r
l
d
R_{t-1}^{world}
Rt−1world上了(也就是
R
t
t
−
1
R_{t}^{t-1}
Rtt−1)?不知道不知道…
这里附上wiki中的公式:
标量对列向量求导(参考1中有误):

代码:
float srx = _transformTobeMapped.rot_x.sin();
float crx = _transformTobeMapped.rot_x.cos();
float sry = _transformTobeMapped.rot_y.sin();
float cry = _transformTobeMapped.rot_y.cos();
float srz = _transformTobeMapped.rot_z.sin();
float crz = _transformTobeMapped.rot_z.cos();
Eigen::Matrix<float, Eigen::Dynamic, 6> matA(laserCloudSelNum, 6);
Eigen::Matrix<float, 6, Eigen::Dynamic> matAt(6, laserCloudSelNum);
Eigen::Matrix<float, 6, 6> matAtA;
Eigen::VectorXf matB(laserCloudSelNum);
Eigen::VectorXf matAtB;
Eigen::VectorXf matX;
for (int i = 0; i < laserCloudSelNum; i++)
{
pointOri = _laserCloudOri.points[i];
coeff = _coeffSel.points[i];
float arx = (crx*sry*srz*pointOri.x + crx * crz*sry*pointOri.y - srx * sry*pointOri.z) * coeff.x
+ (-srx * srz*pointOri.x - crz * srx*pointOri.y - crx * pointOri.z) * coeff.y
+ (crx*cry*srz*pointOri.x + crx * cry*crz*pointOri.y - cry * srx*pointOri.z) * coeff.z;
float ary = ((cry*srx*srz - crz * sry)*pointOri.x
+ (sry*srz + cry * crz*srx)*pointOri.y + crx * cry*pointOri.z) * coeff.x
+ ((-cry * crz - srx * sry*srz)*pointOri.x
+ (cry*srz - crz * srx*sry)*pointOri.y - crx * sry*pointOri.z) * coeff.z;
float arz = ((crz*srx*sry - cry * srz)*pointOri.x + (-cry * crz - srx * sry*srz)*pointOri.y)*coeff.x
+ (crx*crz*pointOri.x - crx * srz*pointOri.y) * coeff.y
+ ((sry*srz + cry * crz*srx)*pointOri.x + (crz*sry - cry * srx*srz)*pointOri.y)*coeff.z;
matA(i, 0) = arx;
matA(i, 1) = ary;
matA(i, 2) = arz;
matA(i, 3) = coeff.x;
matA(i, 4) = coeff.y;
matA(i, 5) = coeff.z;
matB(i, 0) = -coeff.intensity;
}
matAt = matA.transpose();
matAtA = matAt * matA;
matAtB = matAt * matB;
matX = matAtA.colPivHouseholderQr().solve(matAtB);
_transformTobeMapped.rot_x += matX(0, 0);
_transformTobeMapped.rot_y += matX(1, 0);
_transformTobeMapped.rot_z += matX(2, 0);
_transformTobeMapped.pos.x() += matX(3, 0);
_transformTobeMapped.pos.y() += matX(4, 0);
_transformTobeMapped.pos.z() += matX(5, 0);
float deltaR = sqrt(pow(rad2deg(matX(0, 0)), 2) +
pow(rad2deg(matX(1, 0)), 2) +
pow(rad2deg(matX(2, 0)), 2));
float deltaT = sqrt(pow(matX(3, 0) * 100, 2) +
pow(matX(4, 0) * 100, 2) +
pow(matX(5, 0) * 100, 2));
if (deltaR < _deltaRAbort && deltaT < _deltaTAbort)
break;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)