涉及传感器数据的流程,大致整理如下图
传感器的数据从drivers中调用lib中dirvers对应的对象更新数据并发布出去,sensor模块通过订阅原始数据和校准参数,对数据滤波并更正,然后再发布出去,通过ecl模块订阅并融合发布成具体姿态数据
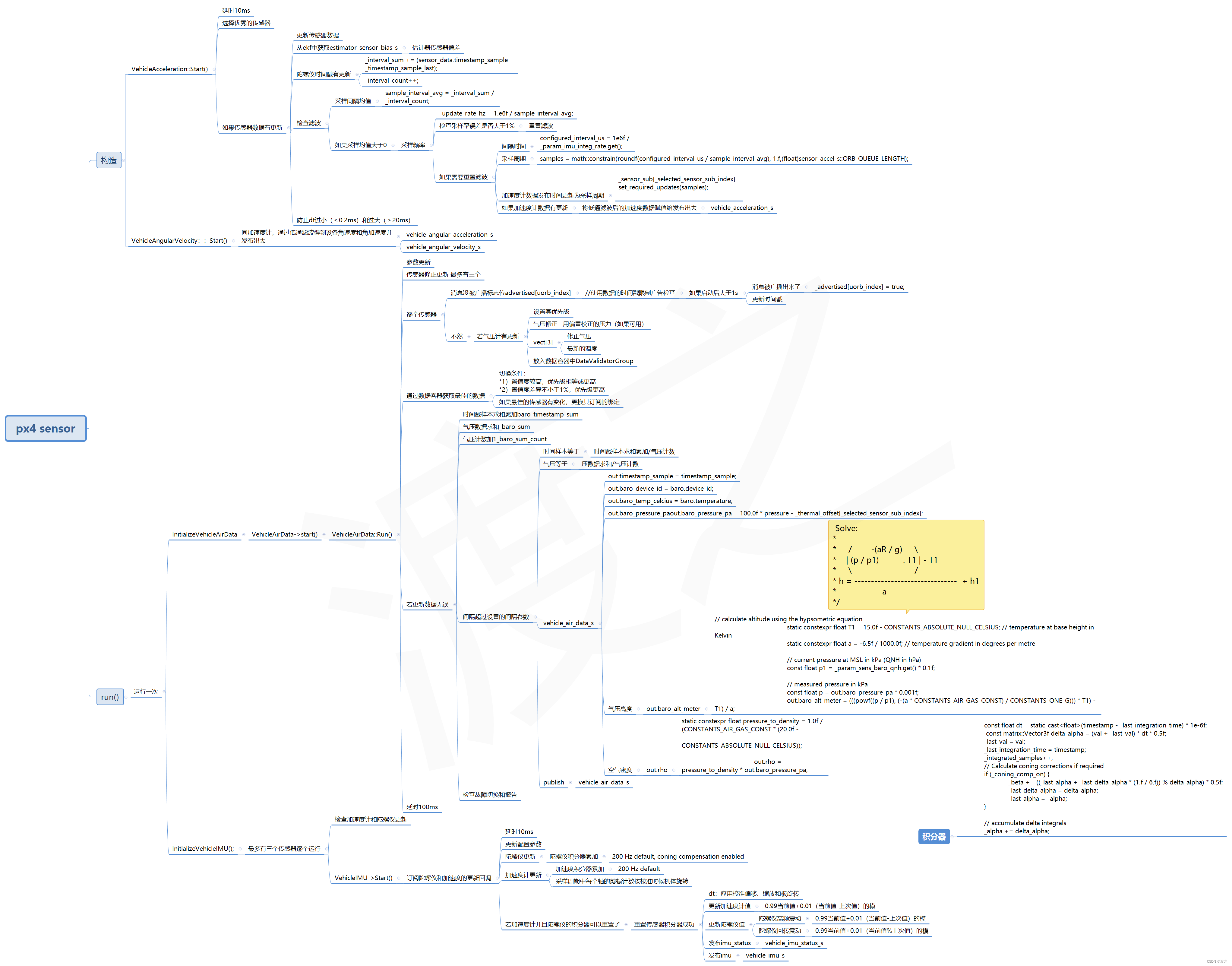
具体流程可以参考如下:
PX4中IMU传感器的数据经过了哪些处理后被使用的?_小火炉飞的博客-CSDN博客
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)