一、前言
上一节介绍了PX4姿态估计调用函数的流程,这一节分享一下我对PX4姿态解算的解读.首先,要理解PX4姿态解算的程序,要先从传感器的特性入手,这里主要介绍的传感器有加速度计,磁力计,陀螺仪.
二、传感器特性
1.加速度计
pixhawk上使用的为三轴加速度计,主要用于测量x,y,z三轴的加速度值,常用的传感器例如mpu6000与mpu9250,在进行PX4二次开发时,我们并不需要编写加速度计相关驱动程序,其代码已经在PX4_Firmware/src/drivers/imu下进行了实现,感兴趣可以自己查阅.这里我们只需了解加速度计的原理与特性.
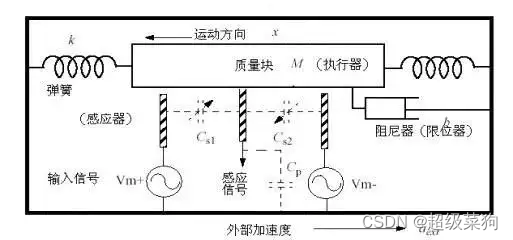
如图所示,该图为加速度计简易模型,由弹簧与质量块构成,当外界有加速度时,质量块位置会发生变化,从而使得电容两端距离改变,流经电容的电流也会发生变化,通过测量电流大小,就可以得到质量块移动距离,从而得到加速度大小。理想状态下,当没有外界作用时,质量块会处于零点位置,但由于工艺,使用时间长短等各种因素,质量块可能会处于非零点位置,即所谓零偏,因此,在飞无人机之前往往需要进行校准。
此外,加速度计校准还涉及到另一个参数,这个参数是标度因数,在这里可以理解为一个比例系数,测量值乘以这个比例系数后得到实际值。
从加速度原理可以看出,在测量加速度时质量块需要不断移动,移动需要时间,因此,在高频情况下加速度计值不一定准确,低频率特性比较好.
2.陀螺仪
pixhawk上另一个比较重要的传感器就是陀螺仪,陀螺仪用于测量x,y,z三轴角速度,其基本的原理是动量守恒。当外部系统发生旋转时,内部转动装置会保持恒定的速度与方向旋转,测量这两个系统的差就可以得到当前系统角速度。为了测量x,y,z三轴角速度,通常采用万向节构成转动装置


以其中一个方向为例,当陀螺仪测量装置随着转动轴转动时,在半径方向上会存在力,使得质量块在半径方向进行周期往复运动,从而得到旋转角速度.但由于存在零点漂移,陀螺仪在低频特性较差,高频特性较好.
3.磁力计
磁力计主要用于测量当前磁场强度。为了能够测量地磁方向,通常将地磁分为水平与垂直方向,水平方向可以近似表示地磁方向。但地球的磁轴与地轴有着夹角,一般称为磁偏角,磁偏角在不同地理位置不同,因此在无人机航向计算时,需要gps获得当前经纬度,然后查表得到当前位置磁偏角,对航向进行修正(后续代码中会看到).同样的磁力计校正也涉及到偏移与标度因数.
三、姿态解算算法
1.为什么采用四元数计算
在介绍姿态解算算法前,先来谈谈姿态的表示方式,常用的姿态表示方法有:四元数,欧拉角,方向余弦这几种方式,并且这几种方式是可以 互相转换,欧拉角虽然计算简单,但是存在退化现象;方向余弦有9个参数,导致其计算量过大,实时性不好;因此,PX4源码中采用四元数来表示姿态。
2.姿态解算的坐标系
在无人机的坐标变换过程中,一般会涉及到以下四个坐标系
1.传感器坐标系
传感器本身具有自己的测量坐标系,在安装过程中会存在安装误差,而传感器读数是在传感器坐标系下测得,为了能让无人机使用,需要将其转换到机体坐标系。但加速度计,磁力计,陀螺仪这些传感器安装时一般与无人机机体中心位置与方向都重合,所以可以粗略认为传感器坐标系与无人机坐标系重合
2.机体坐标系
一般以无人机几何中心为中心,以右手定则建立的三维直角坐标系,x轴位于无人机机体平面,以无人机前进方向为正方向;y轴在机体平面且垂直x轴,z轴垂直机体平面,以向下为正.
3.本地坐标系(local)
为了确定无人机相对于地面的速度与位置,需要引入本地坐标系(仿真中常用的地面坐标系)。一般情况下,本地坐标系是以无人机起点为坐标中心,在水平面上正北方向为x轴,正东为y轴方向,z轴垂直地面向下,这也是所谓的北东地(NED)坐标系
4.全局坐标系(global)
前面提到,在不同经纬度下,地轴与磁轴之间的磁偏角是不一样的,为了修正无人机航向,还需要引入GPS测得的地球经纬度.
3.Mahony滤波算法
下面来讲解算法,如图为mahony滤波的流程图,取自文献[1]

先来解释一下上图:
1.
a
,
m
a,m
a,m与
ω
\omega
ω分别是加速度计测得的加速度,磁力计测得的磁场强度以及陀螺仪测得的角速度。其实这里就引出了一个问题,为什么需要加速度计与磁力计,光靠陀螺仪不就可以得到无人机姿态吗?
确实,光靠陀螺仪是可以得到无人机姿态的,通过对得到的角速度积分就得到了姿态,但靠积分得到的姿态会存在积分误差,这个光靠陀螺仪是无法解决的,因此引入了加速度计与磁力计来解决陀螺仪积分误差。
2.四元数微分方程为
Q
˙
=
1
2
⊗
ω
n
b
b
\dot{Q} =\frac{1}{2} \otimes \omega _{nb}^{b}
Q˙=21⊗ωnbb,式中
Q
Q
Q为姿态四元数,
ω
n
b
b
\omega _{nb}^{b}
ωnbb为无人机机体坐标系b相对于北东地(NED)坐标系n的角速度,这个式子是姿态解算的核心
3.由加速度计与磁力计得来的姿态同样存在误差,因此需要PI控制器来对误差进行修正,PI控制器的输入是由加速度计与磁力计算出的姿态与最终通过四元数微分方程计算出的实际姿态的差值,输出角速度修正值,补偿到陀螺仪,抵消陀螺仪误差
4.这个过程在无人机运行过程中循环计算,不断进行姿态解算
四、姿态解算算法代码讲解
在PX4代码解析(5)中我已经介绍了代码运行流程,本节只针对姿态解算算法重点部分进行讲解,我将这部分代码分为以下几个部分:
1.AttitudeEstimatorQ对象建立以及相关数据获取
2.四元数q的初始化
3.姿态解算
1.AttitudeEstimatorQ对象的构造函数
先来看看.AttitudeEstimatorQ对象的构造函数
AttitudeEstimatorQ::AttitudeEstimatorQ() :
ModuleParams(nullptr),
WorkItem(MODULE_NAME, px4::wq_configurations::att_pos_ctrl)
{
_vel_prev.zero();
_pos_acc.zero();
_gyro.zero();
_accel.zero();
_mag.zero();
_vision_hdg.zero();
_mocap_hdg.zero();
_q.zero();
_rates.zero();
_gyro_bias.zero();
update_parameters(true);
}
2.Run函数
在执行完构造函数后,该进程会执行run函数
void
AttitudeEstimatorQ::Run()
{
if (should_exit()) {
_sensors_sub.unregisterCallback();
exit_and_cleanup();
return;
}
sensor_combined_s sensors;
if (_sensors_sub.update(&sensors)) {
update_parameters();
if (sensors.timestamp > 0) {
_gyro(0) = sensors.gyro_rad[0];
_gyro(1) = sensors.gyro_rad[1];
_gyro(2) = sensors.gyro_rad[2];
}
if (sensors.accelerometer_timestamp_relative != sensor_combined_s::RELATIVE_TIMESTAMP_INVALID) {
_accel(0) = sensors.accelerometer_m_s2[0];
_accel(1) = sensors.accelerometer_m_s2[1];
_accel(2) = sensors.accelerometer_m_s2[2];
if (_accel.length() < 0.01f) {
PX4_ERR("degenerate accel!");
return;
}
}
if (_magnetometer_sub.updated()) {
vehicle_magnetometer_s magnetometer;
if (_magnetometer_sub.copy(&magnetometer)) {
_mag(0) = magnetometer.magnetometer_ga[0];
_mag(1) = magnetometer.magnetometer_ga[1];
_mag(2) = magnetometer.magnetometer_ga[2];
if (_mag.length() < 0.01f) {
PX4_ERR("degenerate mag!");
return;
}
}
}
_data_good = true;
_ext_hdg_good = false;
if (_vision_odom_sub.updated()) {
vehicle_odometry_s vision;
if (_vision_odom_sub.copy(&vision)) {
bool vision_att_valid = PX4_ISFINITE(vision.q[0])
&& (PX4_ISFINITE(vision.pose_covariance[vision.COVARIANCE_MATRIX_ROLL_VARIANCE]) ? sqrtf(fmaxf(
vision.pose_covariance[vision.COVARIANCE_MATRIX_ROLL_VARIANCE],
fmaxf(vision.pose_covariance[vision.COVARIANCE_MATRIX_PITCH_VARIANCE],
vision.pose_covariance[vision.COVARIANCE_MATRIX_YAW_VARIANCE]))) <= _eo_max_std_dev : true);
if (vision_att_valid) {
Dcmf Rvis = Quatf(vision.q);
Vector3f v(1.0f, 0.0f, 0.4f);
_vision_hdg = Rvis.transpose() * v;
if (_param_att_ext_hdg_m.get() == 1) {
_ext_hdg_good = vision.timestamp > 0 && (hrt_elapsed_time(&vision.timestamp) < 500000);
}
}
}
}
if (_mocap_odom_sub.updated()) {
vehicle_odometry_s mocap;
if (_mocap_odom_sub.copy(&mocap)) {
bool mocap_att_valid = PX4_ISFINITE(mocap.q[0])
&& (PX4_ISFINITE(mocap.pose_covariance[mocap.COVARIANCE_MATRIX_ROLL_VARIANCE]) ? sqrtf(fmaxf(
mocap.pose_covariance[mocap.COVARIANCE_MATRIX_ROLL_VARIANCE],
fmaxf(mocap.pose_covariance[mocap.COVARIANCE_MATRIX_PITCH_VARIANCE],
mocap.pose_covariance[mocap.COVARIANCE_MATRIX_YAW_VARIANCE]))) <= _eo_max_std_dev : true);
if (mocap_att_valid) {
Dcmf Rmoc = Quatf(mocap.q);
Vector3f v(1.0f, 0.0f, 0.4f);
_mocap_hdg = Rmoc.transpose() * v;
if (_param_att_ext_hdg_m.get() == 2) {
_ext_hdg_good = mocap.timestamp > 0 && (hrt_elapsed_time(&mocap.timestamp) < 500000);
}
}
}
}
if (_gps_sub.updated()) {
vehicle_gps_position_s gps;
if (_gps_sub.copy(&gps)) {
if (_param_att_mag_decl_a.get() && (gps.eph < 20.0f)) {
update_mag_declination(math::radians(get_mag_declination(gps.lat, gps.lon)));
}
}
}
if (_local_position_sub.updated()) {
vehicle_local_position_s lpos;
if (_local_position_sub.copy(&lpos)) {
if (_param_att_acc_comp.get() && (hrt_elapsed_time(&lpos.timestamp) < 20_ms)
&& lpos.v_xy_valid && lpos.v_z_valid && (lpos.eph < 5.0f) && _inited) {
const Vector3f vel(lpos.vx, lpos.vy, lpos.vz);
if (_vel_prev_t != 0 && lpos.timestamp != _vel_prev_t) {
float vel_dt = (lpos.timestamp - _vel_prev_t) / 1e6f;
//补偿加速度计
_pos_acc = _q.conjugate_inversed((vel - _vel_prev) / vel_dt);
}
_vel_prev_t = lpos.timestamp;
_vel_prev = vel;
} else {
_pos_acc.zero();
_vel_prev.zero();
_vel_prev_t = 0;
}
}
}
hrt_abstime now = hrt_absolute_time();
const float dt = math::constrain((now - _last_time) / 1e6f, _dt_min, _dt_max);
_last_time = now;
if (update(dt)) {
vehicle_attitude_s att = {};
att.timestamp = sensors.timestamp;
_q.copyTo(att.q);
_att_pub.publish(att);
#if defined(ENABLE_LOCKSTEP_SCHEDULER)
if (_param_est_group.get() == 3) {
ekf2_timestamps_s ekf2_timestamps;
ekf2_timestamps.timestamp = now;
ekf2_timestamps.airspeed_timestamp_rel = 0;
ekf2_timestamps.distance_sensor_timestamp_rel = 0;
ekf2_timestamps.optical_flow_timestamp_rel = 0;
ekf2_timestamps.vehicle_air_data_timestamp_rel = 0;
ekf2_timestamps.vehicle_magnetometer_timestamp_rel = 0;
ekf2_timestamps.visual_odometry_timestamp_rel = 0;
_ekf2_timestamps_pub.publish(ekf2_timestamps);
}
#endif
}
}
}
代码中,我对其进行了注释,下面有几个需要强调的点
1.sensor_combined_s是什么?
他是一个结构体,这个结构体是通过定义的消息自动生成,可以在msg文件中查看,在msg文件中找到sensor_combine,文件内容如下:
# Sensor readings in SI-unit form.
# These fields are scaled and offset-compensated where possible and do not
# change with board revisions and sensor updates.
uint64 timestamp # time since system start (microseconds)
int32 RELATIVE_TIMESTAMP_INVALID = 2147483647 # (0x7fffffff) If one of the relative timestamps is set to this value, it means the associated sensor values are invalid
# gyro timstamp is equal to the timestamp of the message
float32[3] gyro_rad # average angular rate measured in the XYZ body frame in rad/s over the last gyro sampling period
uint32 gyro_integral_dt # gyro measurement sampling period in us
int32 accelerometer_timestamp_relative # timestamp + accelerometer_timestamp_relative = Accelerometer timestamp
float32[3] accelerometer_m_s2 # average value acceleration measured in the XYZ body frame in m/s/s over the last accelerometer sampling period
uint32 accelerometer_integral_dt # accelerometer measurement sampling period in us
uint8 CLIPPING_X = 1
uint8 CLIPPING_Y = 2
uint8 CLIPPING_Z = 4
uint8 accelerometer_clipping # bitfield indicating if there was any accelerometer clipping (per axis) during the sampling period
可以看到,在结构体sensor_combine_s中,存放了陀螺仪与加速度计的数据,所以run函数一直到_data_good = true;代码之前的工作就是更新陀螺仪,加速度计,磁力计.当_data_good=true,说明数据准备完成
2._pos_acc是运动加速度,运动加速度与加速度计测量的值不同,加速度计的值=运动加速度+重力加速度;在这里,代码利用两次速度之差除以时间得到运动加速度,这个运动加速度在后续姿态解算有用
3.update(dt)函数就是姿态解算的核心代码,下面对这部分代码进行解读
3.update姿态解算函数
我先把姿态解算的代码贴上来
bool
AttitudeEstimatorQ::update(float dt)
{
if (!_inited) {
if (!_data_good) {
return false;
}
return init_attq();
}
1.从前面的原理可知,姿态解算的核心公式是四元数的微分方程,而为了实现微分方程的计算,我们需要一个四元数初值,四元数初值是通过init_attq()函数产生,代码如下:
bool
AttitudeEstimatorQ::init_attq()
{
Vector3f k = -_accel;
k.normalize();
Vector3f i = (_mag - k * (_mag * k));
i.normalize();
Vector3f j = k % i;
Dcmf R;
R.row(0) = i;
R.row(1) = j;
R.row(2) = k;
_q = R;
Quatf decl_rotation = Eulerf(0.0f, 0.0f, _mag_decl);
_q = _q * decl_rotation;
_q.normalize();
if (PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)) &&
_q.length() > 0.95f && _q.length() < 1.05f) {
_inited = true;
} else {
_inited = false;
}
return _inited;
}
这里面需要提醒的是这句代码
Vector3f i = (_mag - k * (_mag * k))
代码中_mag与k都为向量,且向量k在经历归一化后为单位向量,因此_mag*k可以看做_mag在k向量上的投影长度,然后乘以单位向量k就变成了与k同向,长度为|_mag|*cos
θ
\theta
θ的向量,再使用_mag减去该向量就得到垂直于k的向量i,具体可见下图
 这里就完成了第一段讲解,接着向下看
这里就完成了第一段讲解,接着向下看
Quatf q_last = _q;
Vector3f corr;
float spinRate = _gyro.length();
if (_param_att_ext_hdg_m.get() > 0 && _ext_hdg_good) {
if (_param_att_ext_hdg_m.get() == 1) {
Vector3f vision_hdg_earth = _q.conjugate(_vision_hdg);
float vision_hdg_err = wrap_pi(atan2f(vision_hdg_earth(1), vision_hdg_earth(0)));
corr += _q.conjugate_inversed(Vector3f(0.0f, 0.0f, -vision_hdg_err)) * _param_att_w_ext_hdg.get();
}
if (_param_att_ext_hdg_m.get() == 2) {
Vector3f mocap_hdg_earth = _q.conjugate(_mocap_hdg);
float mocap_hdg_err = wrap_pi(atan2f(mocap_hdg_earth(1), mocap_hdg_earth(0)));
corr += _q.conjugate_inversed(Vector3f(0.0f, 0.0f, -mocap_hdg_err)) * _param_att_w_ext_hdg.get();
}
}
if (_param_att_ext_hdg_m.get() == 0 || !_ext_hdg_good) {
Vector3f mag_earth = _q.conjugate(_mag);
float mag_err = wrap_pi(atan2f(mag_earth(1), mag_earth(0)) - _mag_decl);
float gainMult = 1.0f;
const float fifty_dps = 0.873f;
if (spinRate > fifty_dps) {
gainMult = math::min(spinRate / fifty_dps, 10.0f);
}
corr += _q.conjugate_inversed(Vector3f(0.0f, 0.0f, -mag_err)) * _param_att_w_mag.get() * gainMult;
}
_q.normalize();
Vector3f k(
2.0f * (_q(1) * _q(3) - _q(0) * _q(2)),
2.0f * (_q(2) * _q(3) + _q(0) * _q(1)),
(_q(0) * _q(0) - _q(1) * _q(1) - _q(2) * _q(2) + _q(3) * _q(3))
);
const float accel_norm_sq = _accel.norm_squared();
const float upper_accel_limit = CONSTANTS_ONE_G * 1.1f;
const float lower_accel_limit = CONSTANTS_ONE_G * 0.9f;
if (_param_att_acc_comp.get() || ((accel_norm_sq > lower_accel_limit * lower_accel_limit) &&
(accel_norm_sq < upper_accel_limit * upper_accel_limit))) {
corr += (k % (_accel - _pos_acc).normalized()) * _param_att_w_acc.get();
}
if (spinRate < 0.175f) {
_gyro_bias += corr * (_param_att_w_gyro_bias.get() * dt);
for (int i = 0; i < 3; i++) {
_gyro_bias(i) = math::constrain(_gyro_bias(i), -_bias_max, _bias_max);
}
}
_rates = _gyro + _gyro_bias;
corr += _rates;
_q += _q.derivative1(corr) * dt;
_q.normalize();
if (!(PX4_ISFINITE(_q(0)) && PX4_ISFINITE(_q(1)) &&
PX4_ISFINITE(_q(2)) && PX4_ISFINITE(_q(3)))) {
_q = q_last;
_rates.zero();
_gyro_bias.zero();
return false;
}
return true;
}
五、参考文献及博客
[1]储开斌, 赵爽, 冯成涛. 基于Mahony-EKF的无人机姿态解算算法[J]. 电子测量与仪器学报, 2020, 32(12):7.
[2]Valenti, Roberto G , Dryanovski, et al. Sensors, Vol. 15, Pages 19302-19330: Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. 2015.
[3]米刚, 田增山, 金悦,等. 基于MIMU和磁力计的姿态更新算法研究[J]. 传感技术学报, 2015, 28(1):6.
[4]姿态估计(互补滤波)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)