任务调度机制的实现
任务调度机制是嵌入式实时操作系统的一个重要概念,也是其核心技术。对于可剥夺型内核,优先级高的任务一旦就绪就能剥夺优先级较低任务的CPU使用权,提高了系统的实时响应能力。
FreeRTOS 支持的调度方式
FreeRTOS 操作系统支持三种调度方式:抢占式调度,时间片调度和合作式调度。 实际应用主要是
抢占式调度和时间片调度,合作式调度用到的很少(ps: 在最新的FreeRTOS中,合作式调度也就是协程式调度已被舍弃)。
抢占式调度
每个任务都有不同的优先级,任务会一直运行直到被高优先级任务抢占或者遇到阻塞式的 API 函数,比如
vTaskDelay,执行不同优先级任务之间的任务切换,
时间片调度
每个任务都有相同的优先级,任务会运行固定的时间片个数或者遇到阻塞式的 API 函数,比如
vTaskDelay,才会执行同优先级任务之间的任务切换。
什么是调度器
简单的说,调度器就是使用相关的调度算法来决定当前需要执行的任务。所有的调度器有一个共同的特性:
-
调度器可以区分就绪态任务和挂起任务(由于延迟,信号量等待,邮箱等待,事件组等待等原因而使得任务被挂起)。
-
调度器可以选择就绪态中的一个任务,然后激活它(通过执行这个任务)。 当前正在执行的任务是运行态的任务。
-
不同调度器之间最大的区别就是如何分配就绪态任务间的完成时间。
嵌入式实时操作系统的核心就是调度器和任务切换,调度器的核心就是调度算法。任务切换的实现在不同的嵌入式实时操作系统中区别不大,基本相同的硬件内核架构,任务切换也是相似的。调度算法就有些区别了。
抢占式调度器和时间片调度器
抢占式调度器
使用抢占式调度器,使得最高优先级的任务什么时候可以得到 CPU 的控制权并运行是可知的,同时使得任务级响应时间得以最优化。
总的来说,学习抢占式调度要掌握的最关键一点是:每个任务都被分配了不同的优先级,抢占式调度器会获得就绪列表中优先级最高的任务,并运行这个任务。
如果用户在 FreeRTOS 的配置文件 FreeRTOSConfig.h 中
禁止使用时间片调度, 那么每个任务必须配置不同的优先级。
举例说明:
前提:创建 3 个任务 Task1,Task2 和 Task3。
- Task1 的优先级为 1,Task2 的优先级为 2,Task3 的优先级为 3。 FreeRTOS 操作系统是设置的数值越小任务优先级越低,故 Task3 的优先级最高,Task1 的优先级最低。
- 此框图是 FreeRTOS 操作系统运行过程中的一部分。
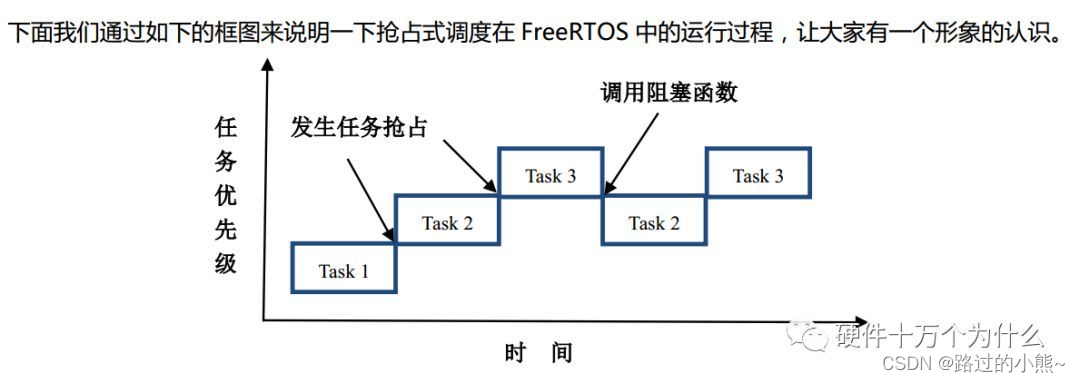
运行过程描述如下:
-
此时任务 Task1 在运行中,运行过程中由于 Task2 就绪,在抢占式调度器的作用下任务 Task2 抢占Task1 的执行。 Task2 进入到运行态,Task1 由运行态进入到就绪态。
-
任务 Task2 在运行中,运行过程中由于 Task3 就绪,在抢占式调度器的作用下任务 Task3 抢占 Task2的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
-
任务 Task3 运行过程中调用了阻塞式 API 函数,比如 vTaskDelay,任务 Task3 被挂起,在抢占式调度器的作用下查找到下一个要执行的最高优先级任务是 Task2,任务 Task2 由就绪态进入到运行态。
-
任务 Task2 在运行中,运行过程中由于 Task3 再次就绪,在抢占式调度器的作用下任务 Task3 抢占Task2 的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
上面就是一个简单的不同优先级任务通过抢占式调度进行任务调度和任务切换的过程。
时间片调度器
在小型的嵌入式 RTOS 中,最常用的的时间片调度算法就是 Round-robin 调度算法。
这种调度算法可以用于抢占式或者合作式的多任务中。另外,时间片调度适合用于不要求任务实时响应的情况。实现 Round-robin 调度算法需要给同优先级的任务分配一个专门的列表,用于记录当前就绪的任务,并为每个任务分配一个时间片(也就是需要运行的时间长度,时间片用完了就进行任务切换)。
FreeRTOSConfig.h 文件中使能宏定义:
时间片调度使用举例说明:
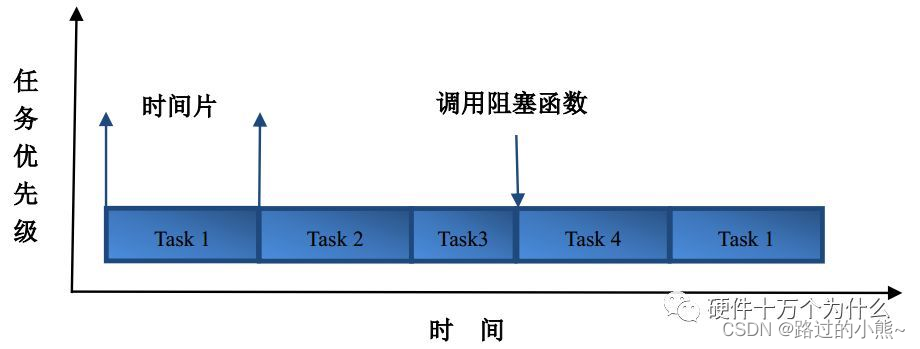
创建 4 个同优先级任务 Task1,Task2,Task3 和 Task4。
每个任务分配的时间片大小是 5 个系统时钟节拍。
运行过程描述如下:
- 先运行任务 Task1,运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task2。
- 任务 Task2 运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task3。
- 任务 Task3 在运行期间调用了阻塞式 API 函数,调用函数时,虽然 5 个系统时钟节拍的时间片大小还没有用完,此时依然会通过时间片调度切换到下一个任务 Task4。 (注意,没有用完的时间片不会再使用,下次任务 Task3 得到执行还是按照 5 个系统时钟节拍运行)
- 任务 Task4 运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task1。
上面就是一个简单的同优先级任务通过时间片调度进行任务调度和任务切换的过程。
时间管理的实现
FreeRTOS提供的典型时间管理函数是vTaskDelay(),调用此函数可以实现将任务延时一段特定时间的功能。在FreeRT0S中,若一个任务要延时xTicksToDelay个时钟节拍,系统内核会把当前系统已运行的时钟节拍总数(定义为xTickCount,32位长度)加上xTicksToDelay得到任务下次唤醒时的时钟节拍数xTimeToWake。然后,内核把此任务的任务控制块从就绪链表中删除,把xTimeToWake作为结点值赋予任务的xItemValue,再根据xTimeToWake的值把任务控制块按照顺序插入不同的链表。若xTimeToWake > xTickCount,即计算中没有出现溢出,内核把任务控制块插入到pxDelayedTaskList链表;若xTimeToWak e< xTickCount,即在计算过程中出现溢出,内核把任务控制块插入到pxOverflowDelayed-Taskust链表。
每发生一个时钟节拍,内核就会把当前的xTick-Count加1。若xTickCount的结果为0,即发生溢出,内核会把pxOverflowDelayedTaskList作为当前链表;否则,内核把pxDelaycdTaskList作为当前链表。内核依次比较xTickCotlrtt和链表各个结点的xTimcToWake。若xTick-Count等于或大于xTimeToWake,说明延时时间已到,应该把任务从等待链表中删除,加入就绪链表。
由此可见,不同于μC/OS—II,FreeRTOS采用“加”的方式实现时间管理。其优点是时间节拍函数的执行时间与任务数量基本无关,而μC/OS—II的OSTimcTick()的执行时间正比于应用程序中建立的任务数。因此当任务较多时,FreeRTOS采用的时间管理方式能有效加快时钟节拍中断程序的执行速度。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)