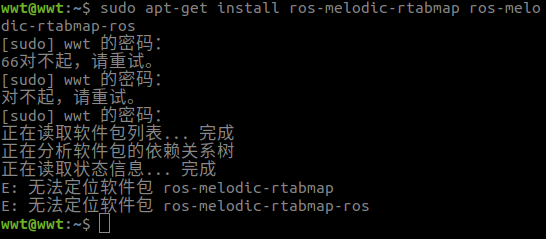
ubuntu18.04 ros-melodic 在安装ros依赖包时总是出现E软件包无法定位
鱼香ROS介绍:
鱼香ROS是由机器人爱好者共同组成的社区,欢迎一起参与机器人技术交流。
进交流群请加机器人小伊微信:fishros2048
文章信息:
标题:ubuntu18.04 ros-melodic 在安装ros依赖包时总是出现E软件包无法定位
原文地址:https://fishros.org.cn/forum/topic/71
关键词:
参与者: 541477150,小鱼,
版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
1. 541477150看着电脑说:
也换过源,在换rospackage源时出现没有许可自动禁用的报错
2. 小鱼看着代码说:
该问题为源造成的问题,这类问题如确认源没有问题,则可以使用搜索安装的方法解决
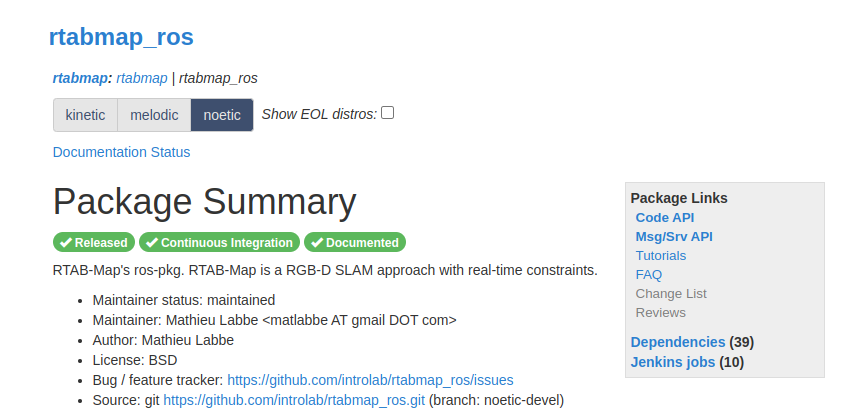
@541477150 我到ROS官网查看了这个包,在melodic版本是有发布的。并且尝试用18的系统运行search也可以搜的到,请提供完整的一键安装结果。并再次尝试sudo apt update后再搜索。
另外已发布的帖子是可以再次编辑的,无需删掉重发
root@a55fb6221f72:~/code/nav# apt search rtabmap
Sorting... Done
Full Text Search... Done
ros-melodic-rtabmap/bionic 0.20.16-1bionic.20211228.192305 amd64
RTAB-Map's standalone library.
ros-melodic-rtabmap-dbgsym/bionic 0.20.16-1bionic.20211228.192305 amd64
debug symbols for ros-melodic-rtabmap
ros-melodic-rtabmap-ros/bionic 0.20.16-1bionic.20211228.200231 amd64
RTAB-Map's ros-pkg.
ros-melodic-rtabmap-ros-dbgsym/bionic 0.20.16-1bionic.20211228.200231 amd64
debug symbols for ros-melodic-rtabmap-ros
3. 小鱼看着天空说:
@541477150 我先给你改下格式,代码可以直接复制粘贴,这样方便我这边复制搜索。
另外再提供一些信息:
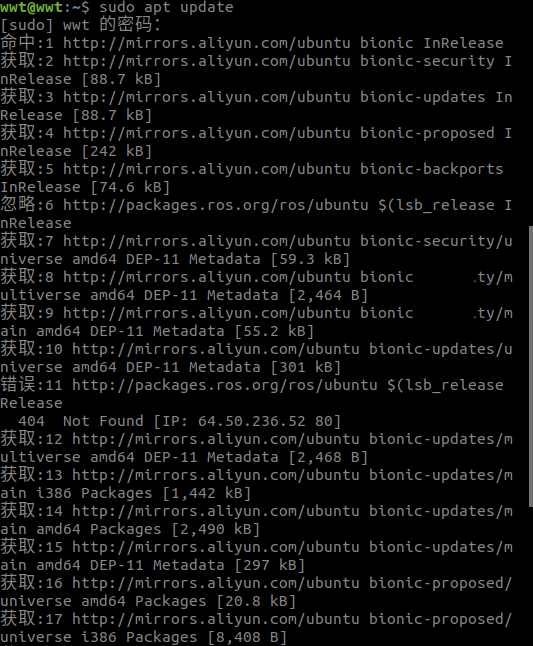
- sudo apt update 的结果
- 以及sudo apt search rtabmap 结果
可以参考:
4. 541477150吃着火锅说:
@541477150 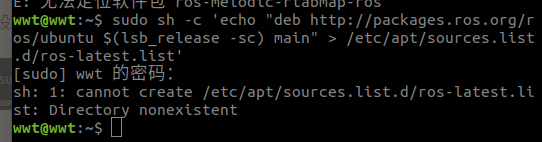 添加源时出现这种报错,求求各位大佬帮忙解决一下,谢谢!
添加源时出现这种报错,求求各位大佬帮忙解决一下,谢谢!
5. 小鱼抖着腿说:
@541477150 请确定好你要问的问题是什么?不要同时在一个帖子下提不同的问题,描述清楚你的目的。希望先看一下提问的智慧一贴。
6. 541477150看着天空说:
@小鱼 就是想问怎么解决安装ros依赖时E:无法定位软件包的问题
7. 小鱼吃着火锅说:
@541477150 添加源并不一定能解决你的问题,请按照我提供的第一条回复提供一下信息,这样才能判断出来你的具体问题。
没有软件包不一定是源不对,说不定作者就没有发布,第一条回复就是确认一下你的源是否正常,如果不正常再做后续处理。
8. 541477150掰着手指头说:
@小鱼
这个是执行上面两条命令的结果,麻烦你帮我看看,谢谢
9. 小鱼苦兮兮的说:
@541477150 看到你的ros源有问题,先试用一键安装跑一遍安装ros,过程中选换源并清除第三方源。
之后再次search一下你要安装的包,看看能不能找到。
另外代码尽量复制粘贴到论坛用代码块包裹,更好看和用于检索。
代码块格式可点击编辑器 </> 按钮
10. 541477150苦兮兮的说:
@小鱼
wget http://fishros.com/install -O fishros && . fishros
--2022-03-26 17:20:33-- http://fishros.com/install
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 301 Moved Permanently
位置:http://fishros.com/install/ [跟随至新的 URL]
--2022-03-26 17:20:33-- http://fishros.com/install/
再次使用存在的到 fishros.com:80 的连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 300 [application/octet-stream]
正在保存至: “fishros”
fishros 100% 300 --.-KB/s 用时 0s
2022-03-26 17:20:33 (149 MB/s) - 已保存 “fishros” [300/300])
[sudo] wwt 的密码:
--2022-03-26 17:20:36-- http://fishros.com/install/install1s/tools/base.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 36328 (35K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/base.py”
/tmp/fishinsta 100% 35.48K --.-KB/s 用时 0.05s
2022-03-26 17:20:36 (772 KB/s) - 已保存 “/tmp/fishinstall/tools/base.py” [36328/36328])
Run CMD Task:[dpkg --print-architecture]
[-]Result:success
基础检查通过...
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs开发环境(通过nodejs可以预览小鱼官网噢)
[7]:一键安装:VsCode
[8]:一键安装:Docker
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:1
--2022-03-26 17:20:49-- http://fishros.com/install/install1s/tools/tool_install_ros.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 7804 (7.6K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_install_ros.py”
/tmp/fishinsta 100% 7.62K --.-KB/s 用时 0.001s
2022-03-26 17:20:49 (9.91 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_install_ros.py” [7804/7804])
--2022-03-26 17:20:49-- http://fishros.com/install/install1s/tools/tool_config_rosenv.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 2307 (2.3K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_config_rosenv.py”
/tmp/fishinsta 100% 2.25K --.-KB/s 用时 0s
2022-03-26 17:20:49 (8.63 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_config_rosenv.py” [2307/2307])
--2022-03-26 17:20:49-- http://fishros.com/install/install1s/tools/tool_config_system_source.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 3340 (3.3K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_config_system_source.py”
/tmp/fishinsta 100% 3.26K --.-KB/s 用时 0s
2022-03-26 17:20:50 (295 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_config_system_source.py” [3340/3340])
欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供
欢迎使用ROS开箱子工具,本工具由[鱼香ROS]小鱼贡献..
小鱼:检测当前系统ubuntu18.04:bionic 支持一键安装ROS
RUN Choose Task:[请输入括号内的数字]
如果您是第一次安装,推荐您先更换一下系统源
[1]:更换系统源再继续安装
[2]:不更换继续安装
[0]:quit
请输入[]内的数字以选择:1
欢迎使用模板工程,本工具由作者小鱼提供
欢迎使用一键换源工具,本工具由[鱼香ROS]小鱼贡献..
RUN Choose Task:[请输入括号内的数字]
请选择换源方式
[1]:仅更换系统源
[2]:更换系统源并清理第三方源
[0]:quit
请输入[]内的数字以选择:2
Run CMD Task:[sudo rm -rf /etc/apt/sources.list]
[-]Result:success
删除一个资源文件
Run CMD Task:[dpkg --print-architecture]
[-]Result:success
检测到当前系统架构为[amd64],正在为你更换对应源..
替换完成,尝试第一次更新....
Run CMD Task:[sudo apt update]
[\]获取:1 https://mirrors.ustc.edu.cn/ubuntu bionic InRel[|]获取:2 https://mirrors.ustc.edu.cn/ubuntu bionic-updat[-]获取:3 https://mirrors.ustc.edu.cn/ubuntu bionic-backp[/]获取:4 https://mirrors.ustc.edu.cn/ubuntu bionic-secur[\]获取:5 https://mirrors.ustc.edu.cn/ubuntu bionic/main [|]获取:6 https://mirrors.ustc.edu.cn/ubuntu bionic/main [-]获取:7 https://mirrors.ustc.edu.cn/ubuntu bionic/main [/]获取:8 https://mirrors.ustc.edu.cn/ubuntu bionic/main [\]获取:9 https://mirrors.ustc.edu.cn/ubuntu bionic/main [|]获取:10 https://mirrors.ustc.edu.cn/ubuntu bionic/main[-]获取:11 https://mirrors.ustc.edu.cn/ubuntu bionic/main[/]获取:12 https://mirrors.ustc.edu.cn/ubuntu bionic/rest[\]获取:13 https://mirrors.ustc.edu.cn/ubuntu bionic/rest[|]获取:14 https://mirrors.ustc.edu.cn/ubuntu bionic/rest[-]获取:15 https://mirrors.ustc.edu.cn/ubuntu bionic/rest[/]获取:16 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[\]获取:17 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[|]获取:18 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[-]获取:19 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[/]获取:20 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[\]获取:21 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[|]获取:22 https://mirrors.ustc.edu.cn/ubuntu bionic/univ[-]获取:23 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[/]获取:24 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[\]获取:25 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[|]获取:26 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[-]获取:27 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[/]获取:28 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[\]获取:29 https://mirrors.ustc.edu.cn/ubuntu bionic/mult[|]获取:30 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:31 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[/]获取:32 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[\]获取:33 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[|]获取:34 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:35 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[/]获取:36 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[\]获取:37 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[|]获取:38 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:39 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[/]获取:40 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[\]获取:41 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[|]获取:42 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:43 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[/]获取:44 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[\]获取:45 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[|]获取:46 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:47 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[/]获取:48 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[\]获取:49 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[|]获取:50 https://mirrors.ustc.edu.cn/ubuntu bionic-upda[-]获取:51 https://mirrors.ustc.edu.cn/ubuntu bionic-back[/]获取:52 https://mirrors.ustc.edu.cn/ubuntu bionic-back[\]获取:53 https://mirrors.ustc.edu.cn/ubuntu bionic-back[|]获取:54 https://mirrors.ustc.edu.cn/ubuntu bionic-back[-]获取:55 https://mirrors.ustc.edu.cn/ubuntu bionic-back[/]获取:56 https://mirrors.ustc.edu.cn/ubuntu bionic-back[\]获取:57 https://mirrors.ustc.edu.cn/ubuntu bionic-back[|]获取:58 https://mirrors.ustc.edu.cn/ubuntu bionic-back[-]获取:59 https://mirrors.ustc.edu.cn/ubuntu bionic-back[/]获取:60 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[\]获取:61 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[|]获取:62 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]获取:63 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[/]获取:64 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[\]获取:65 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[|]获取:66 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]获取:67 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[/]获取:68 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[\]获取:69 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[|]获取:70 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]获取:71 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[/]获取:72 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[\]获取:73 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[|]获取:74 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]获取:75 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[/]获取:76 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[\]获取:77 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[|]获取:78 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]获取:79 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[/]获取:80 https://mirrors.ustc.edu.cn/ubuntu bionic-secu[-]Result:success
搞定了,不信你看,累死宝宝了,还不快去给小鱼点个赞~
['获取:1 https://mirrors.ustc.edu.cn/ubuntu bionic InRelease [242 kB]', '获取:2 https://mirrors.ustc.edu.cn/ubuntu bionic-updates InRelease [88.7 kB]', '获取:3 https://mirrors.ustc.edu.cn/ubuntu bionic-backports InRelease [74.6 kB]', '获取:4 https://mirrors.ustc.edu.cn/ubuntu bionic-security InRelease [88.7 kB]', '获取:5 https://mirrors.ustc.edu.cn/ubuntu bionic/main amd64 Packages [1,019 kB]', '获取:6 https://mirrors.ustc.edu.cn/ubuntu bionic/main i386 Packages [1,007 kB]', '获取:7 https://mirrors.ustc.edu.cn/ubuntu bionic/main Translation-en [516 kB]', '获取:8 https://mirrors.ustc.edu.cn/ubuntu bionic/main Translation-zh_CN [67.7 kB]', '获取:9 https://mirrors.ustc.edu.cn/ubuntu bionic/main amd64 DEP-11 Metadata [477 kB]', '获取:10 https://mirrors.ustc.edu.cn/ubuntu bionic/main DEP-11 48x48 Icons [118 kB]', '获取:11 https://mirrors.ustc.edu.cn/ubuntu bionic/main DEP-11 64x64 Icons [245 kB]', '获取:12 https://mirrors.ustc.edu.cn/ubuntu bionic/restricted amd64 Packages [9,184 B]', '获取:13 https://mirrors.ustc.edu.cn/ubuntu bionic/restricted i386 Packages [9,156 B]', '获取:14 https://mirrors.ustc.edu.cn/ubuntu bionic/restricted Translation-en [3,584 B]', '获取:15 https://mirrors.ustc.edu.cn/ubuntu bionic/restricted Translation-zh_CN [1,188 B]', '获取:16 https://mirrors.ustc.edu.cn/ubuntu bionic/universe amd64 Packages [8,570 kB]', '获取:17 https://mirrors.ustc.edu.cn/ubuntu bionic/universe i386 Packages [8,531 kB]', '获取:18 https://mirrors.ustc.edu.cn/ubuntu bionic/universe Translation-zh_CN [174 kB]', '获取:19 https://mirrors.ustc.edu.cn/ubuntu bionic/universe Translation-en [4,941 kB]', '获取:20 https://mirrors.ustc.edu.cn/ubuntu bionic/universe amd64 DEP-11 Metadata [3,287 kB]', '获取:21 https://mirrors.ustc.edu.cn/ubuntu bionic/universe DEP-11 48x48 Icons [2,151 kB]', '获取:22 https://mirrors.ustc.edu.cn/ubuntu bionic/universe DEP-11 64x64 Icons [8,420 kB]', '获取:23 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse i386 Packages [144 kB]', '获取:24 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse amd64 Packages [151 kB]', '获取:25 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse Translation-zh_CN [4,768 B]', '获取:26 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse Translation-en [108 kB]', '获取:27 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse amd64 DEP-11 Metadata [49.7 kB]', '获取:28 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse DEP-11 48x48 Icons [8,931 B]', '获取:29 https://mirrors.ustc.edu.cn/ubuntu bionic/multiverse DEP-11 64x64 Icons [225 kB]', '获取:30 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main i386 Packages [1,442 kB]', '获取:31 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main amd64 Packages [2,490 kB]', '获取:32 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main Translation-en [468 kB]', '获取:33 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main amd64 DEP-11 Metadata [297 kB]', '获取:34 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main DEP-11 48x48 Icons [83.0 kB]', '获取:35 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/main DEP-11 64x64 Icons [154 kB]', '获取:36 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/restricted i386 Packages [32.4 kB]', '获取:37 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/restricted amd64 Packages [695 kB]', '获取:38 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/restricted Translation-en [95.3 kB]', '获取:39 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe amd64 Packages [1,797 kB]', '获取:40 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe i386 Packages [1,602 kB]', '获取:41 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe Translation-en [389 kB]', '获取:42 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe amd64 DEP-11 Metadata [301 kB]', '获取:43 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe DEP-11 48x48 Icons [229 kB]', '获取:44 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/universe DEP-11 64x64 Icons [507 kB]', '获取:45 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse amd64 Packages [24.8 kB]', '获取:46 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse i386 Packages [11.2 kB]', '获取:47 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse Translation-en [6,012 B]', '获取:48 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse amd64 DEP-11 Metadata [2,468 B]', '获取:49 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse DEP-11 48x48 Icons [29 B]', '获取:50 https://mirrors.ustc.edu.cn/ubuntu bionic-updates/multiverse DEP-11 64x64 Icons [2,638 B]', '获取:51 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/main i386 Packages [10.3 kB]', '获取:52 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/main amd64 Packages [10.3 kB]', '获取:53 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/main Translation-en [4,824 B]', '获取:54 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe amd64 Packages [11.3 kB]', '获取:55 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe i386 Packages [11.3 kB]', '获取:56 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe Translation-en [5,772 B]', '获取:57 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe amd64 DEP-11 Metadata [9,268 B]', '获取:58 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe DEP-11 48x48 Icons [2,809 B]', '获取:59 https://mirrors.ustc.edu.cn/ubuntu bionic-backports/universe DEP-11 64x64 Icons [3,943 B]', '获取:60 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main i386 Packages [1,137 kB]', '获取:61 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main amd64 Packages [2,143 kB]', '获取:62 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main Translation-en [376 kB]', '获取:63 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main amd64 DEP-11 Metadata [55.2 kB]', '获取:64 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main DEP-11 48x48 Icons [28.9 kB]', '获取:65 https://mirrors.ustc.edu.cn/ubuntu bionic-security/main DEP-11 64x64 Icons [65.1 kB]', '获取:66 https://mirrors.ustc.edu.cn/ubuntu bionic-security/restricted i386 Packages [25.7 kB]', '获取:67 https://mirrors.ustc.edu.cn/ubuntu bionic-security/restricted amd64 Packages [670 kB]', '获取:68 https://mirrors.ustc.edu.cn/ubuntu bionic-security/restricted Translation-en [91.3 kB]', '获取:69 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe amd64 Packages [1,183 kB]', '获取:70 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe i386 Packages [1,011 kB]', '获取:71 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe Translation-en [272 kB]', '获取:72 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe amd64 DEP-11 Metadata [59.3 kB]', '获取:73 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe DEP-11 48x48 Icons [28.4 kB]', '获取:74 https://mirrors.ustc.edu.cn/ubuntu bionic-security/universe DEP-11 64x64 Icons [139 kB]', '获取:75 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse i386 Packages [6,012 B]', '获取:76 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse amd64 Packages [17.6 kB]', '获取:77 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse Translation-en [3,660 B]', '获取:78 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse amd64 DEP-11 Metadata [2,464 B]', '获取:79 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse DEP-11 48x48 Icons [29 B]', '获取:80 https://mirrors.ustc.edu.cn/ubuntu bionic-security/multiverse DEP-11 64x64 Icons [2,638 B]', '已下载 58.7 MB,耗时 5秒 (11.6 MB/s)', '正在读取软件包列表...', '正在分析软件包的依赖关系树...', '正在读取状态信息...', '所有软件包均为最新。', '']
镜像修复完成.....
一键安装已开源,欢迎给个star/提出问题/帮助完善:https://github.com/fishros/install/
Run CMD Task:[sudo apt update]
[\]命中:1 https://mirrors.ustc.edu.cn/ubuntu bionic InRel[|]命中:2 https://mirrors.ustc.edu.cn/ubuntu bionic-updat[-]命中:3 https://mirrors.ustc.edu.cn/ubuntu bionic-backp[/]命中:4 https://mirrors.ustc.edu.cn/ubuntu bionic-secur[-]Result:success
Run CMD Task:[sudo apt install curl gnupg2 -y]
[\]升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软[-]Result:success
Run CMD Task:[curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -]
[-]Result:success
['http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/', 'http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/']
Run CMD Task:[dpkg --print-architecture]
[-]Result:success
Run CMD Task:[sudo mkdir -p /etc/apt/sources.list.d/]
[-]Result:success
Run CMD Task:[sudo apt update]
[\]忽略:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu [|]命中:2 https://mirrors.ustc.edu.cn/ubuntu bionic InRel[-]命中:3 https://mirrors.ustc.edu.cn/ubuntu bionic-updat[/]命中:4 https://mirrors.ustc.edu.cn/ubuntu bionic-backp[\]命中:5 https://mirrors.ustc.edu.cn/ubuntu bionic-secur[|]获取:6 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu[-]获取:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu [/]获取:8 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu [\]获取:9 http://10.10.10.13:9999/mirrors.tuna.tsinghua.e[|]错误:9 http://10.10.10.13:9999/mirrors.tuna.tsinghua.e[-] 文件尺寸不符(686957 != 686960)。您使用的镜像正在同步[|] - SHA256:19c628b7f7e5fef09e0884915d6ce0cc25712613f2[-] - SHA1:b3faeb900dfe3e21711bb11653d2b19389c9d1bd [we[\] Release file created at: Thu, 24 Mar 2022 08:56:12 +[|]获取:10 http://10.10.10.13:9999/mirrors.tuna.tsinghua.[-]错误:10 http://10.10.10.13:9999/mirrors.tuna.tsinghua.[/] 文件尺寸不符(783639 != 783636)。您使用的镜像正在同步[-] - SHA256:306365208268ee7dfa5c23521587c14ba426622515[/] - SHA1:efbf593eca9ea123eee1f3b0e77008baa2b8407a [we[|] Release file created at: Thu, 24 Mar 2022 08:56:54 +[-]Result:code:100
你的系统当前apt存在问题,请先使用一键换源处理...若无法处理,请将下列错误信息告知小鱼...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', 'E: 无法下载 http://10.10.10.13:9999/mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/dists/bionic/main/binary-amd64/Packages.gz 文件尺寸不符(686957 != 686960)。您使用的镜像正在同步中? [IP: 10.10.10.13 9999]\n', ' Hashes of expected file:\n', ' - Filesize:686960 [weak]\n', ' - SHA256:19c628b7f7e5fef09e0884915d6ce0cc25712613f2bd363493f50990c35c9776\n', ' - SHA1:b3faeb900dfe3e21711bb11653d2b19389c9d1bd [weak]\n', ' - MD5Sum:e100bb946e4f1f83cb980545d495f202 [weak]\n', ' Release file created at: Thu, 24 Mar 2022 08:56:12 +0000\n', 'E: 无法下载 http://10.10.10.13:9999/mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/dists/bionic/main/binary-amd64/Packages.gz 文件尺寸不符(783639 != 783636)。您使用的镜像正在同步中? [IP: 10.10.10.13 9999]\n', ' Hashes of expected file:\n', ' - Filesize:783636 [weak]\n', ' - SHA256:306365208268ee7dfa5c23521587c14ba4266225159b989672548ecfde360c73\n', ' - SHA1:efbf593eca9ea123eee1f3b0e77008baa2b8407a [weak]\n', ' - MD5Sum:e55275c5c50b527ef1558346591be8f2 [weak]\n', ' Release file created at: Thu, 24 Mar 2022 08:56:54 +0000\n', 'E: 部分索引文件下载失败。如果忽略它们,那将转而使用旧的索引文件。\n']
换源后更新失败,请联系小鱼处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[\]libpam-krb5-migrate-heimdal - PAM module for migrating[|]libpam-krb5-migrate-mit - PAM module for migrating to [-]libroscpp-core-dev - Development files for Robot OS ro[|]ros-base-lisp-dev - Lisp Robot OS base development met[-]ros-base-python-dev - Python Robot OS base development[/]ros-melodic-ros-base - A metapackage which extends ros_core and includes other basic non-robot tools like actio[-]Result:success ginlib.
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称:
[1]:melodic
[0]:quit
请输入[]内的数字以选择:
这是一键安装过错有报错,还能继续安装吗
11. 小鱼喜滋滋的说:
@541477150 可以继续装,你可以先试试,如果没报错并且再装肯定就可以,试一下的速度比发帖子再问要快的多,反正也不收你钱,不要怕。
另外你的格式还是不对,包括上面的也比较乱,我已经给你都手动改过了,建议先学习一下markdown格式,右边的窗口是可以预览的,在发布前也可以先预览一下确认可以再发布。
12. 541477150看着电脑说:
[[topic:post_is_deleted]]
13. 541477150苦兮兮的说:
[[topic:post_is_deleted]]
14. 541477150吃着火锅说:
@小鱼
sudo apt search rtabmap
正在排序... 完成
全文搜索... 完成
重新安装ros后,search后还是出现这样的问题
15. 小鱼掰着手指头说:
该问题为源造成的问题,这类问题如确认源没有问题,则可以使用搜索安装的方法解决
@541477150 我到ROS官网查看了这个包,在melodic版本是有发布的。并且尝试用18的系统运行search也可以搜的到,请提供完整的一键安装结果。并再次尝试sudo apt update后再搜索。
另外已发布的帖子是可以再次编辑的,无需删掉重发
root@a55fb6221f72:~/code/nav# apt search rtabmap
Sorting... Done
Full Text Search... Done
ros-melodic-rtabmap/bionic 0.20.16-1bionic.20211228.192305 amd64
RTAB-Map's standalone library.
ros-melodic-rtabmap-dbgsym/bionic 0.20.16-1bionic.20211228.192305 amd64
debug symbols for ros-melodic-rtabmap
ros-melodic-rtabmap-ros/bionic 0.20.16-1bionic.20211228.200231 amd64
RTAB-Map's ros-pkg.
ros-melodic-rtabmap-ros-dbgsym/bionic 0.20.16-1bionic.20211228.200231 amd64
debug symbols for ros-melodic-rtabmap-ros
16. 541477150喜滋滋的说:
@小鱼
现在一键安装完可以search出来
sudo apt search rtabmap
正在排序... 完成
全文搜索... 完成
ros-melodic-rtabmap/bionic 0.20.18-4bionic.20220303.214033 amd64 RTAB-Map's standalone library.
ros-melodic-rtabmap-dbgsym/bionic 0.20.18-4bionic.20220303.214033 amd64 debug symbols for ros-melodic-rtabmap
ros-melodic-rtabmap-ros/bionic 0.20.18-2bionic.20220314.185706 amd64 RTAB-Map's ros-pkg.
ros-melodic-rtabmap-ros-dbgsym/bionic 0.20.18-2bionic.20220314.185706 amd64 debug symbols for ros-melodic-rtabmap-ros
但是执行 sudo apt-get install ros-melodic-rtabmap ros-melodic-rtabmap-ros命令时报了以下错误:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
有一些软件包无法被安装。如果您用的是 unstable 发行版,这也许是
因为系统无法达到您要求的状态造成的。该版本中可能会有一些您需要的软件
包尚未被创建或是它们已被从新到(Incoming)目录移出。
下列信息可能会对解决问题有所帮助:
下列软件包有未满足的依赖关系:
ros-melodic-rtabmap : 依赖: libpcl-dev 但是它将不会被安装
ros-melodic-rtabmap-ros : 依赖: ros-melodic-pcl-conversions 但是它将不会被安装
依赖: ros-melodic-pcl-ros 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
17. 541477150抖着腿说:
[[topic:post_is_deleted]]
18. 541477150看着代码说:
@小鱼
现在以上问题已经通过重新一键安装解决了.接下来在对工作空间进行编译时出现了以下报错:
~/rtabmap_ws$ catkin_make
Base path: /home/wwt/rtabmap_ws
Source space: /home/wwt/rtabmap_ws/src
Build space: /home/wwt/rtabmap_ws/build
Devel space: /home/wwt/rtabmap_ws/devel
Install space: /home/wwt/rtabmap_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/wwt/rtabmap_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/wwt/rtabmap_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/melodic
-- This workspace overlays: /opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/wwt/rtabmap_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
CMake Deprecation Warning at /usr/src/googletes /CMakeLists.txt:1 (cmake_minimum_required):
Compatibility with CMake < 2.8.12 will be removed from a future version of
CMake.
Update the VERSION argument <min> value or use a ...<max> suffix to tell
CMake that the project does not need compatibility with older versions.
CMake Deprecation Warning at /usr/src/googletest/googlemock/CMakeLists.txt:41 (cmake_minimum_required):
Compatibility with CMake < 2.8.12 will be removed from a future version of
CMake.
Update the VERSION argument <min> value or use a ...<max> suffix to tell
CMake that the project does not need compatibility with older versions.
CMake Deprecation Warning at /usr/src/googletest/googletest/CMakeLists.txt:48 (cmake_minimum_required):
Compatibility with CMake < 2.8.12 will be removed from a future version of
CMake.
Update the VERSION argument <min> value or use a ...<max> suffix to tell
CMake that the project does not need compatibility with older versions.
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - rtabmap_ros
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'rtabmap_ros'
-- ==> add_subdirectory(rtabmap_ros)
CMake Deprecation Warning at rtabmap_ros/CMakeLists.txt:1 (cmake_minimum_required):
Compatibility with CMake < 2.8.12 will be removed from a future version of
CMake.
Update the VERSION argument <min> value or use a ...<max> suffix to tell
CMake that the project does not need compatibility with older versions.
CMake Deprecation Warning at rtabmap_ros/CMakeLists.txt:7 (cmake_policy):
The OLD behavior for policy CMP0043 will be removed from a future version
of CMake.
The cmake-policies(7) manual explains that the OLD behaviors of all
policies are deprecated and that a policy should be set to OLD only under
specific short-term circumstances. Projects should be ported to the NEW
behavior and not rely on setting a policy to OLD.
CMake Deprecation Warning at rtabmap_ros/CMakeLists.txt:12 (cmake_policy):
The OLD behavior for policy CMP0042 will be removed from a future version
of CMake.
The cmake-policies(7) manual explains that the OLD behaviors of all
policies are deprecated and that a policy should be set to OLD only under
specific short-term circumstances. Projects should be ported to the NEW
behavior and not rely on setting a policy to OLD.
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
CMake Error at /usr/local/share/cmake-3.20/Modules/FindPackageHandleStandardArgs.cmake:230 (message):
Could NOT find OpenCV (missing: optflow) (found version "3.4.1")
Call Stack (most recent call first):
/usr/local/share/cmake-3.20/Modules/FindPackageHandleStandardArgs.cmake:594 (_FPHSA_FAILURE_MESSAGE)
/usr/local/share/OpenCV/OpenCVConfig.cmake:314 (find_package_handle_standard_args)
rtabmap_ros/CMakeLists.txt:37 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/wwt/rtabmap_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/wwt/rtabmap_ws/build/CMakeFiles/CMakeError.log".
Makefile:324: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
19. 小鱼掰着手指头说:
@541477150 这个是opencv版本低或找不到所致,是一个比较常见的问题,建议先自行搜索。
20. 541477150苦兮兮的说:
@小鱼 找了一上午还是没有找到解决办法,请小鱼帮帮忙
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)