TX2的软件源为国外服务器,网速会很慢,需要换国内的ARM源。
备份/etc/lib路径下的source.list文件,然后在终端(按ctrl+alt+T打开)执行以下命令:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak #为防止误操作后无法恢复,先备份原文件sources.list
sudo vim /etc/apt/sources.list #打开sources.list,将原来的内容使用”#”符号全部注释掉,然后在文件结尾出添加中国科学技术大学或清华的源
将文件改为国内源(注意修改之前先将原文件备份),还有一点要注意,换源需要换ARM的源,不要换成了pc平台的软件源。这里推荐两个国内源,将原来文件里面的内容全部替换成下面两个源之一就可以:
清华源:
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted
科大的源:
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main universe restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main universe restricted
替换之后,执行
sudo apt-get update
更新源,然后会打印出来一堆错误,如下图所示
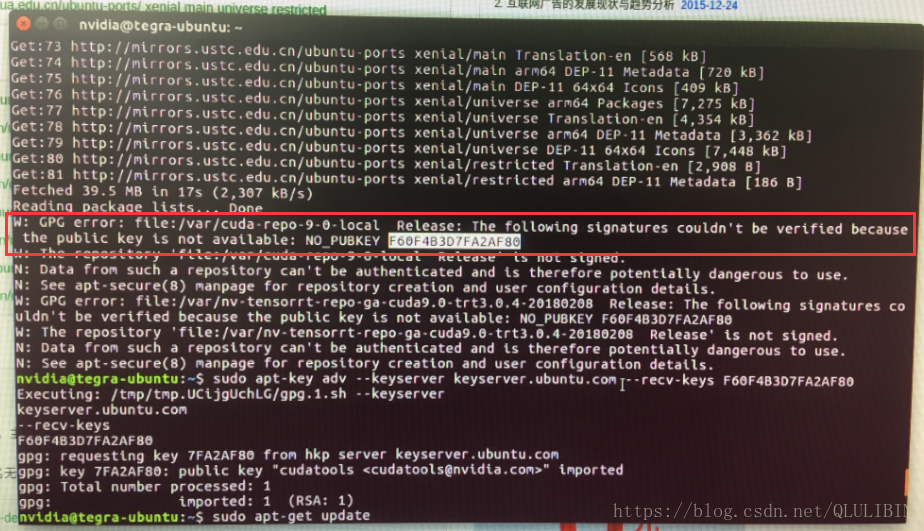
这是一个是GPG错误,下列签名无法验证,我们需要获取系统中的这个公钥,从信息中获取密钥号,比如上面这个错误,密钥号是F60F4B3D7FA2AF80,执行
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 68980A0EA10B4DE8(此处密钥号要与错误提示中的一致)
后再次运行
sudo apt-get update
更新,这个错误将消失。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)