Jetson xavier NX-EMMC版本重装系统相对比较麻烦,以下方法本人已经试过多次,基本没有出现什么问题。
一.安装虚拟机
安装虚拟机的步骤我们不多过述,网上有许多博客讲述虚拟机安装。我们这里主要使用VMware Workstation Pro,在上面安装Ubuntu18.04。分配内存时给到60G,因为烧录系统给NX时会下载很多安装包,到时内存会占用很多。
注:最好安装虚拟机用来烧录系统,使用实体机新手可能会把系统装崩。
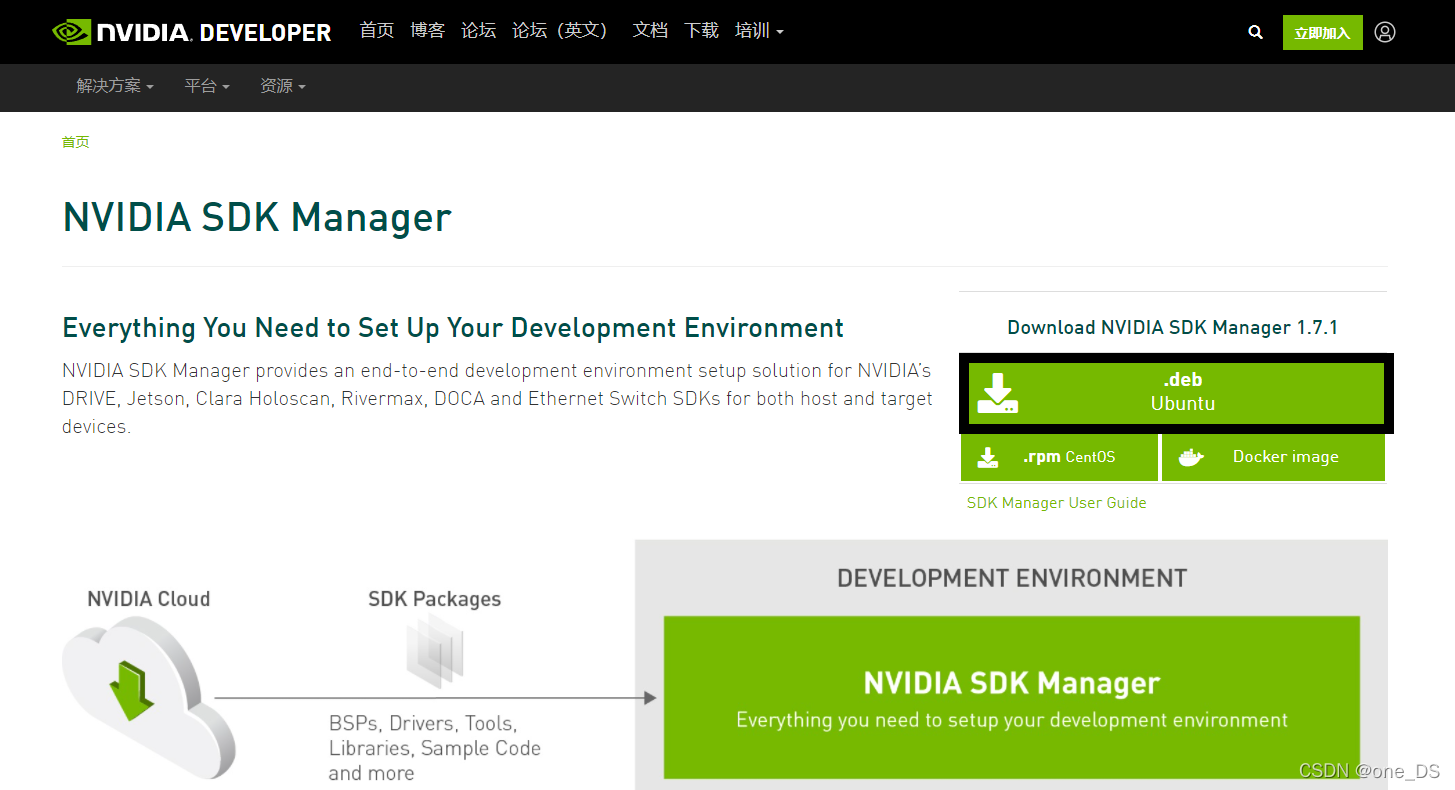
二.安装SDKmanager
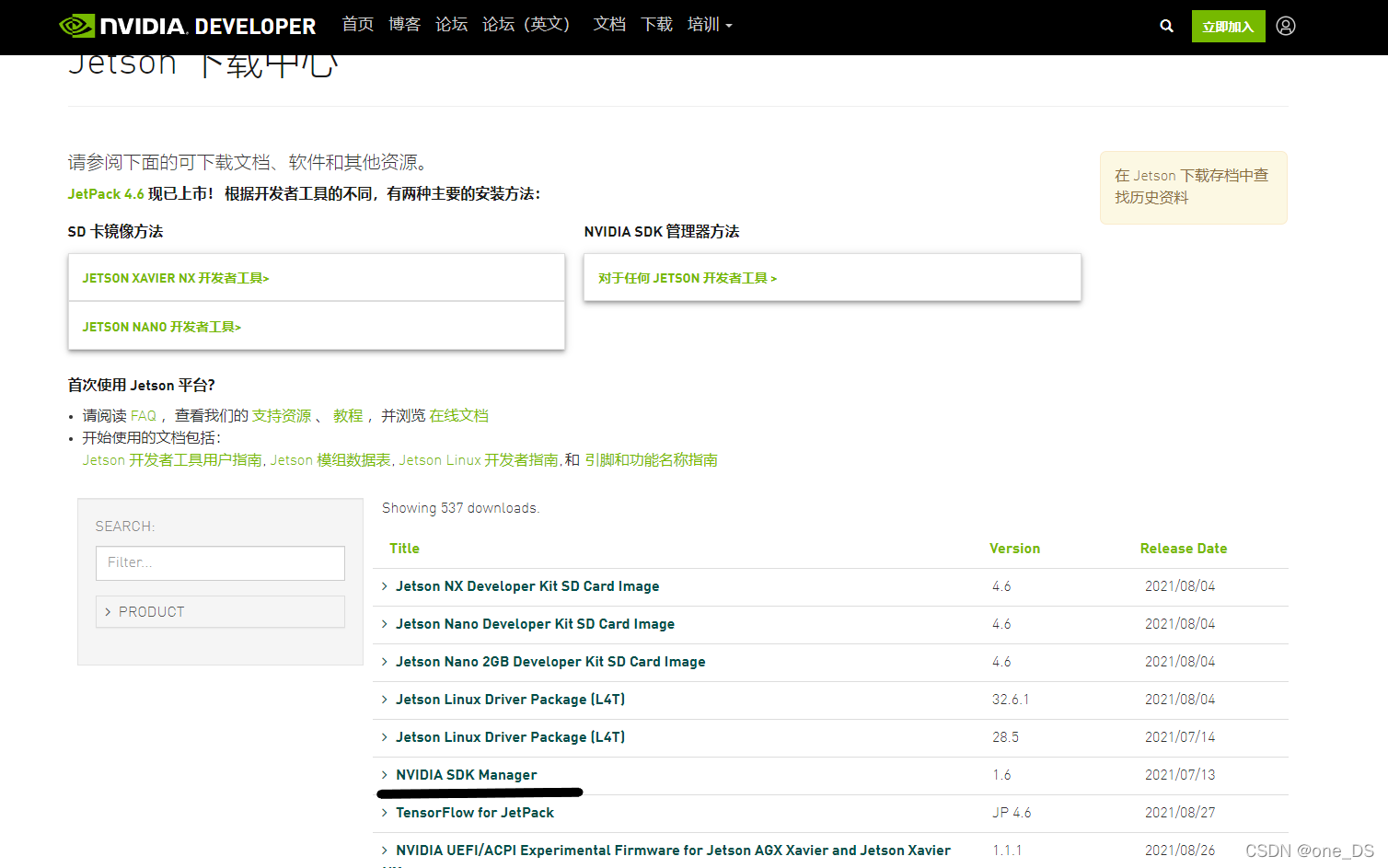
下载最新的JetPack,下载地址:https://developer.nvidia.com/embedded/downloads
必须登录才能下载,下载后使用也需要登录。
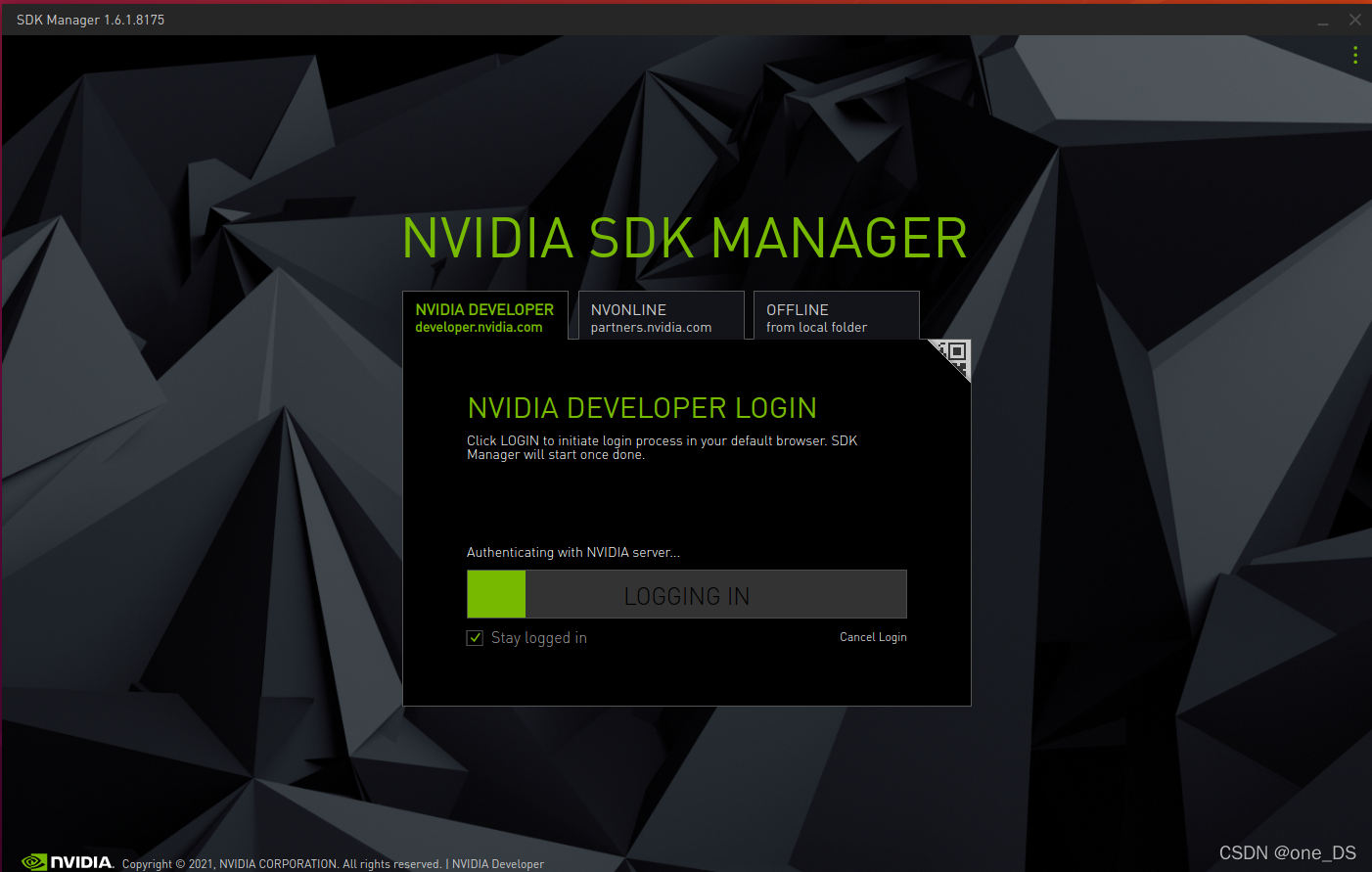
三.打开SDKmanager
打开后会出现个进度条,后面会弹出一个网页,需要登录账号,登录后进度条才会走动。
进度条加载完成后会出现这个页面,选择我们安装的东西。
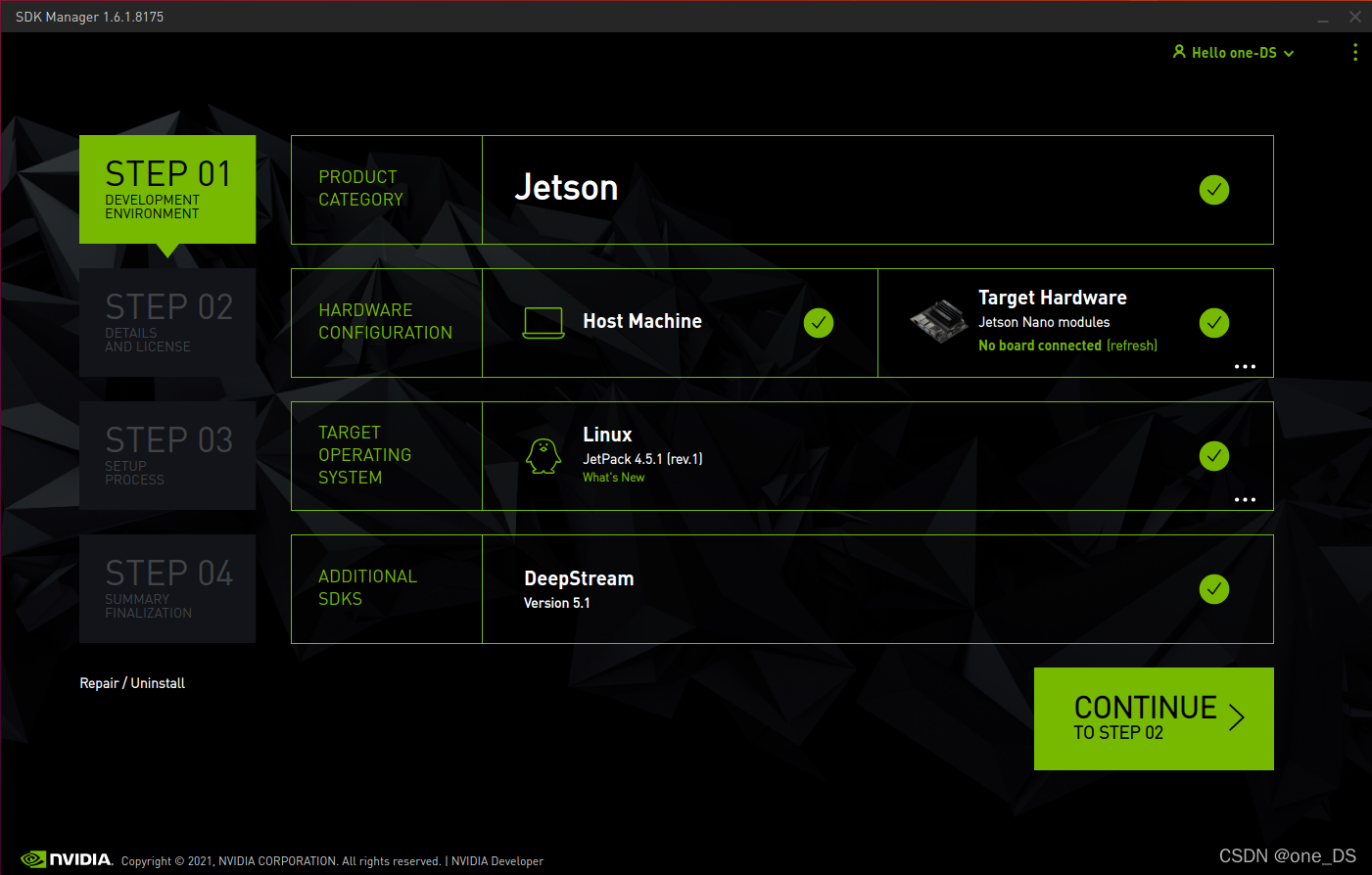
我一般会这样选择,Host Machine 的勾勾去掉,Target Hardware 选择Jetson Xavier NX modules, JetPack版本选择4.4,之前试过4.5以上的,如果你的固态没有格式化的,烧录系统后是启动不了,把固态拔掉后可以启动系统,但是插入后系统还是会启动不了。JetPack 4.4没出现这个问题。
按以下选择
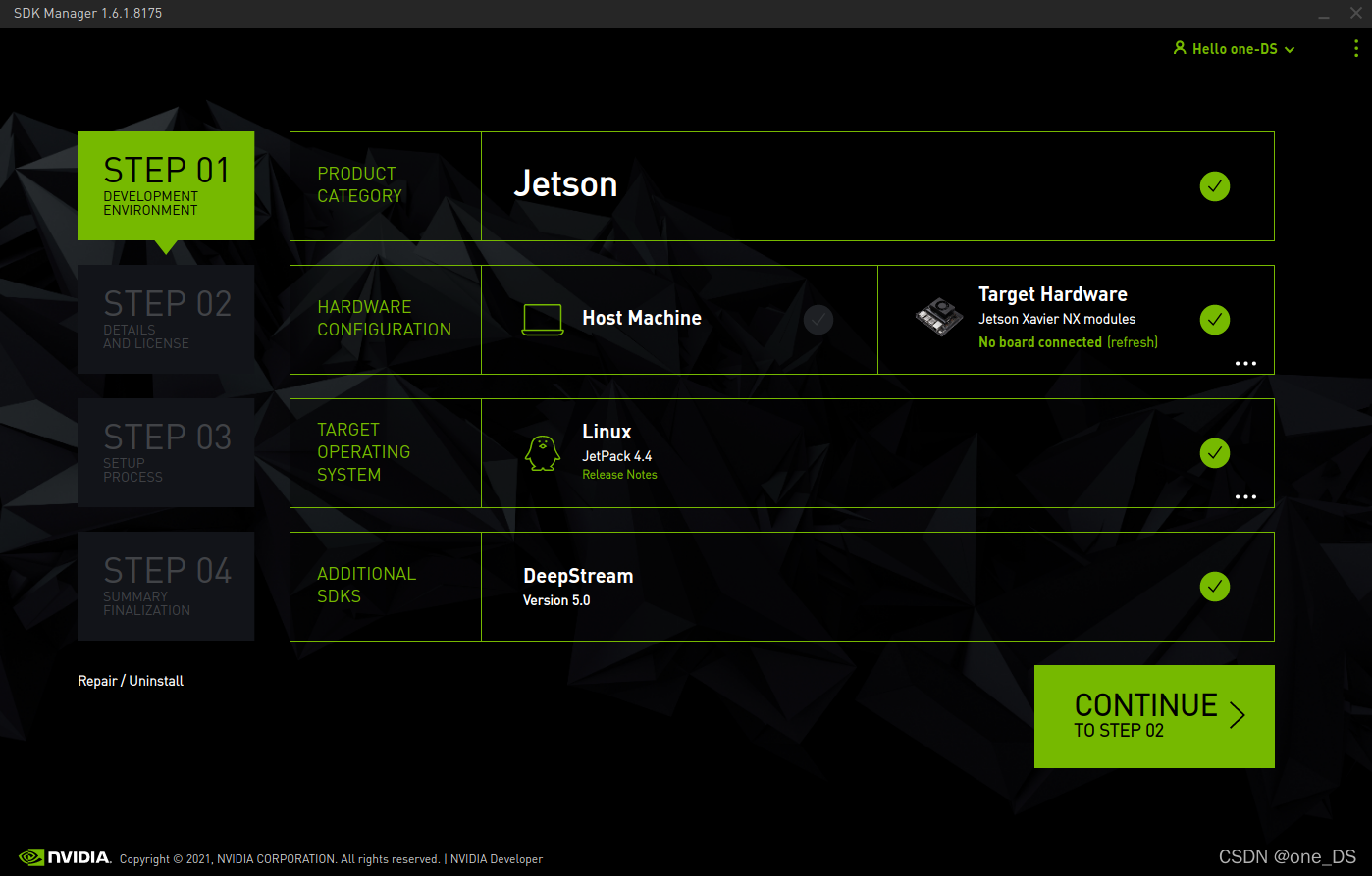
选择好后,点TO STEP 02进入下一步
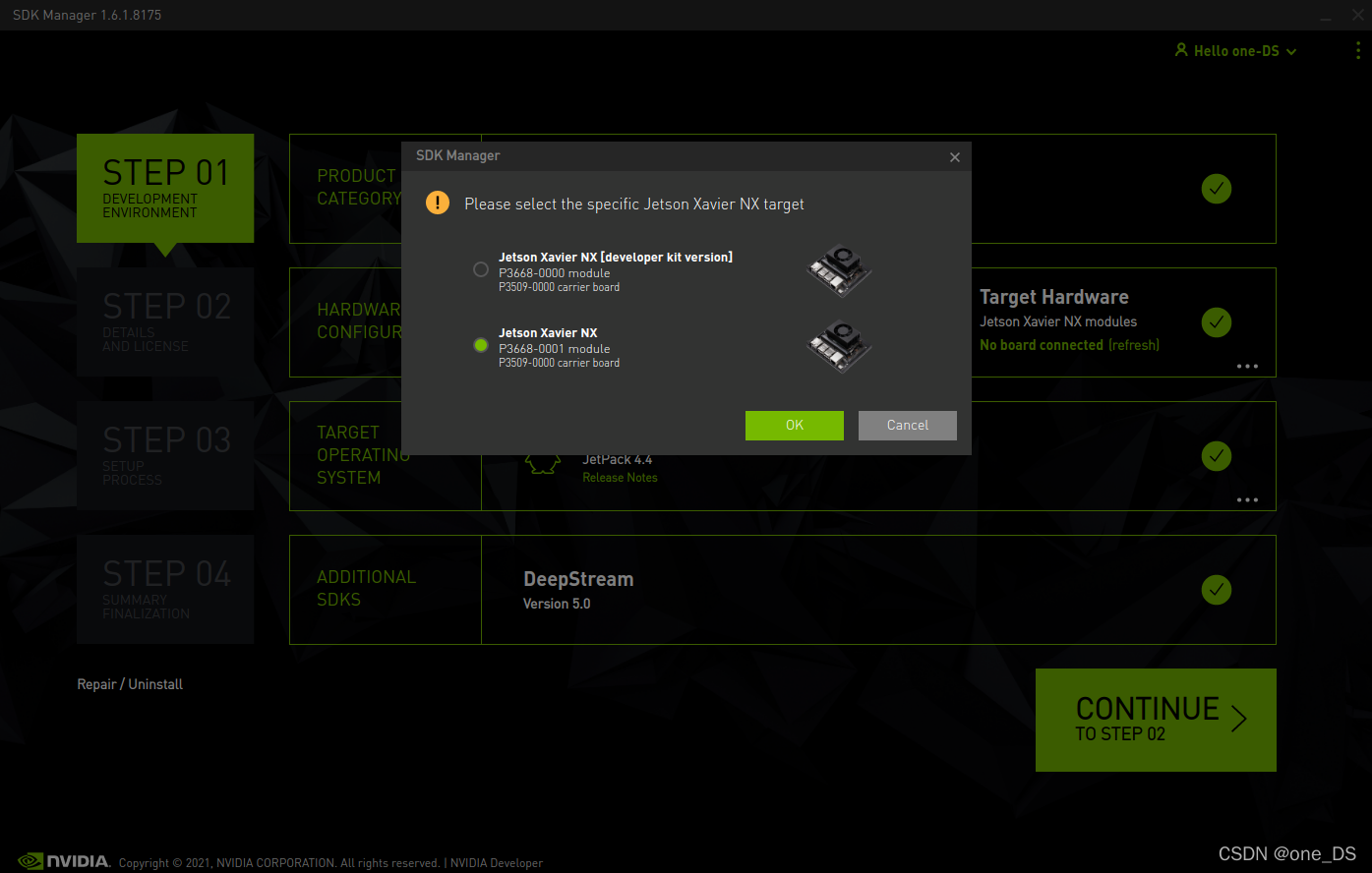
这时会出现一个弹窗,按以下选择
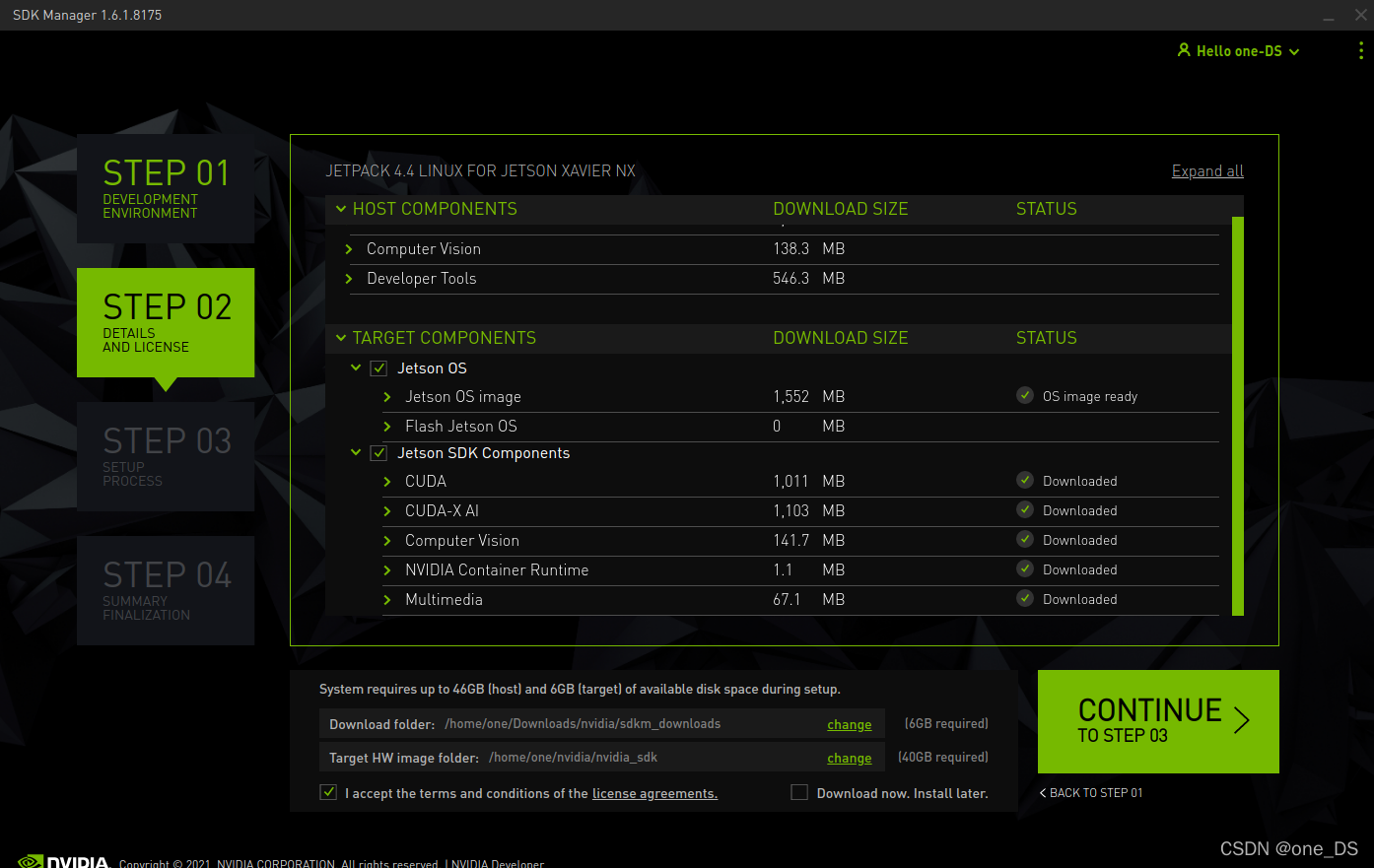
进入第二步后,勾选Jetson OS 和Jetson SDK Components
再勾选I accept the …
Dowmload now.Install later不勾选
之后点击TO STEP 03
后面就会开始下载
注:这个是下载在虚拟机里,并不是烧录。烧录还需继续往下。
下载完后,会出现这个窗口
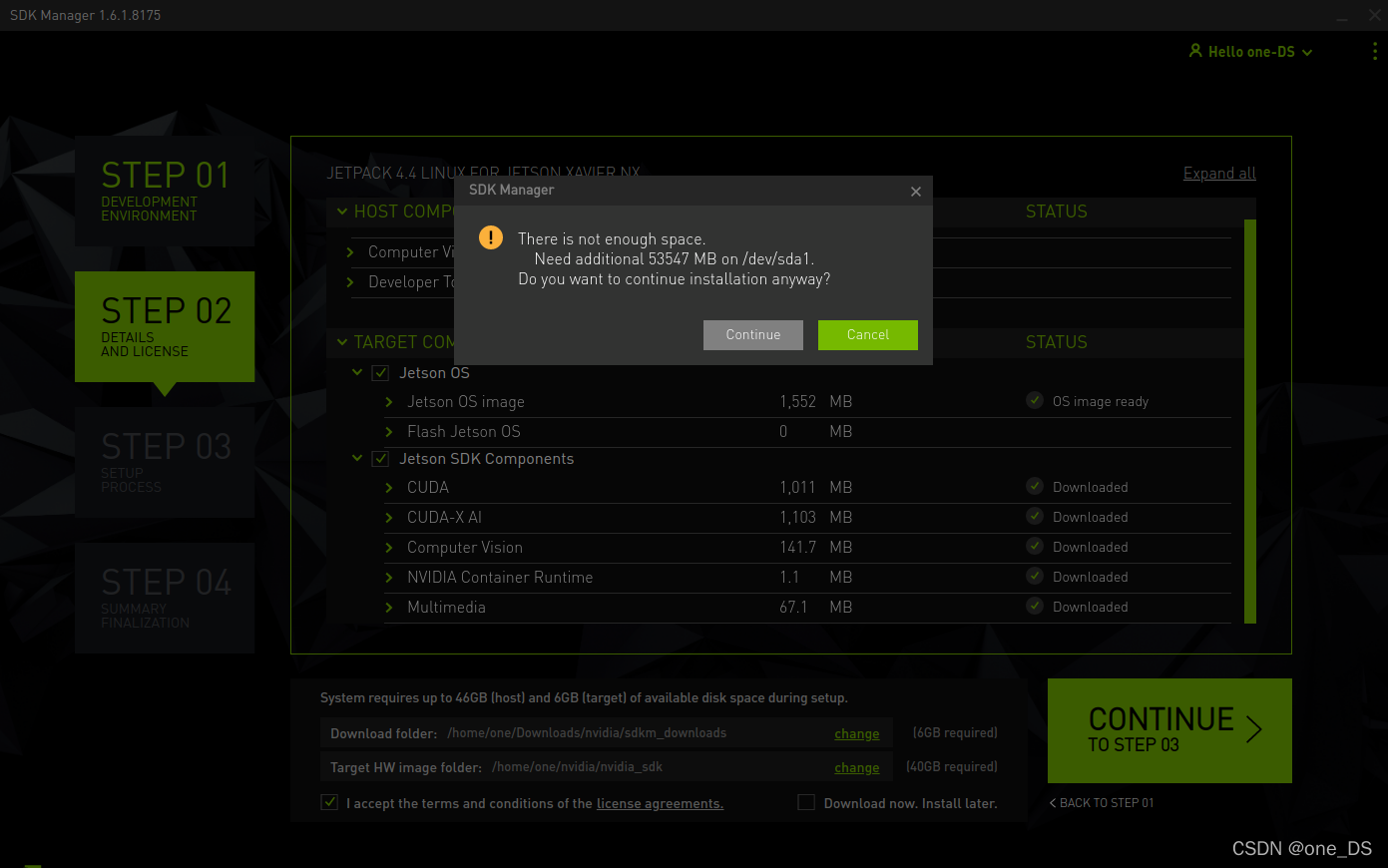
提示开始烧录系统,按下continue
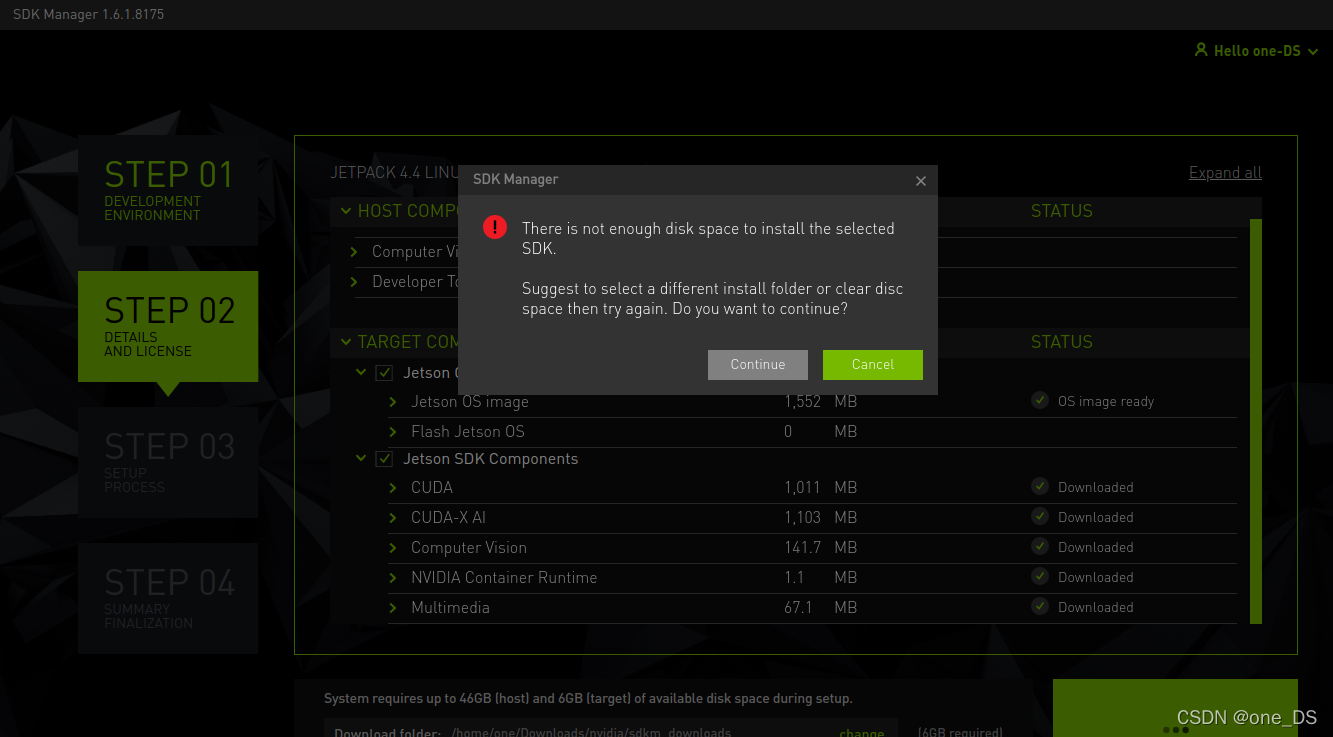
继续按下continue
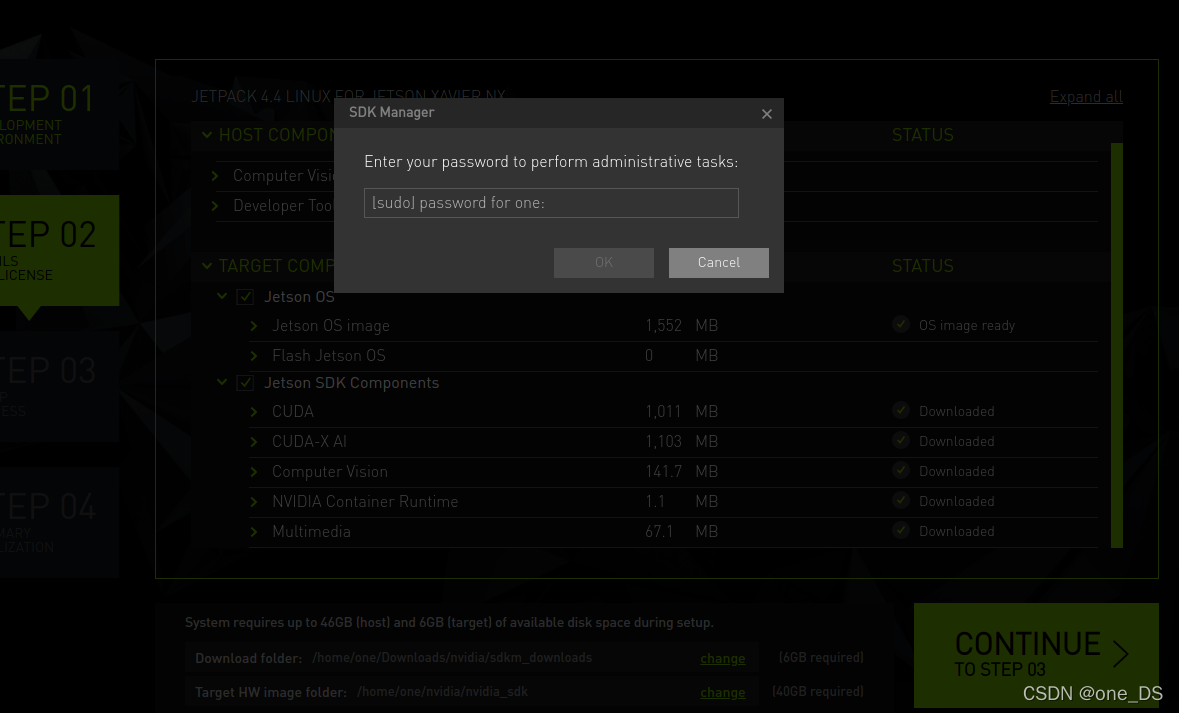
这里需要输入虚拟机用户密码,输入后就是烧录界面了。
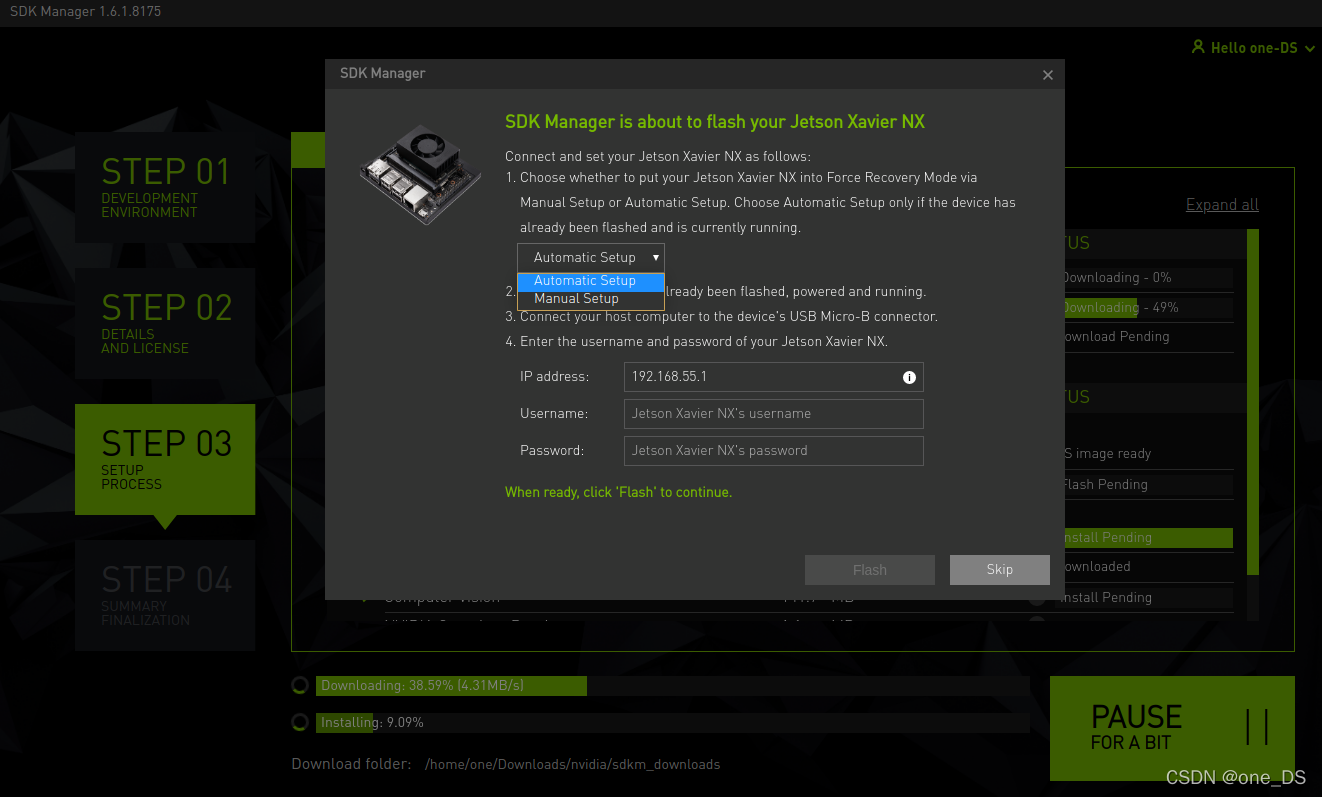
我们选择手动烧录,选择Manual setup。
先别急着按Flash
因为jetson xavier nx板子需要接入电脑,先将从右边数过来板子二和三两个引脚短接。
同时将板子连接到虚拟机,然后给板子上电。这时虚拟机会有提示,连接到电脑或者虚拟机,选择虚拟机。
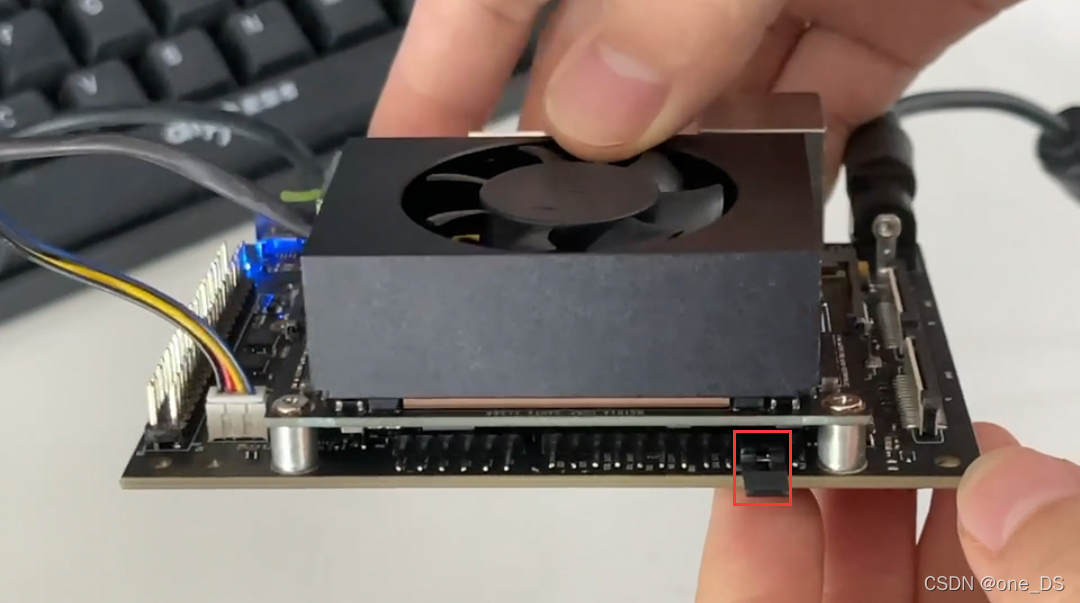

点击Flash就开始烧录系统了。
烧录过程中,给板子接入屏幕、键盘和鼠标,等下烧录后需要手动操作完成系统安装。
四.安装CUDA等
系统烧录完成后会再弹出这个界面
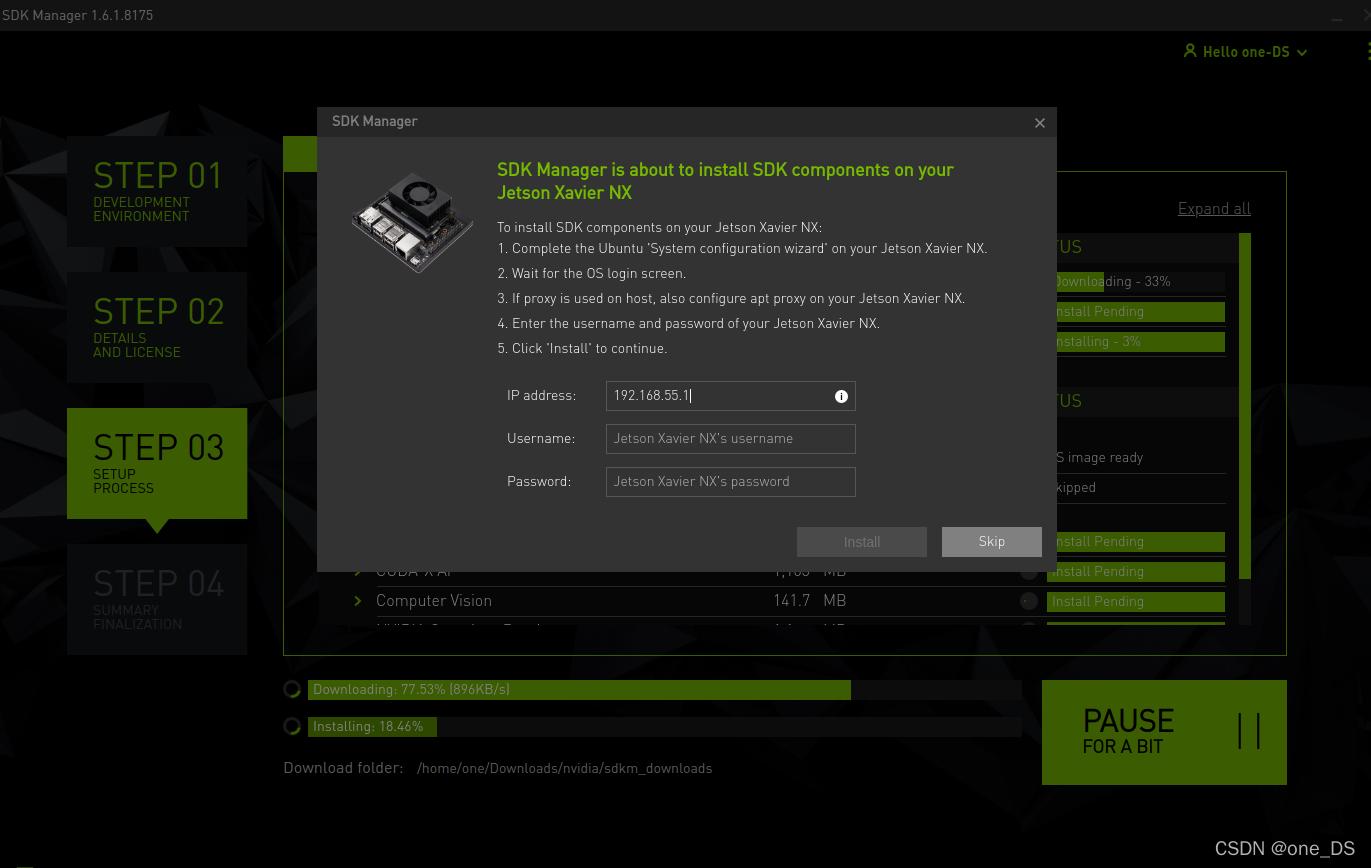
这个界面是安装CUDA等。
IP address输入的是jetson xavier nx的IP地址,通过查看TP-LINK等手机软件可查看板子的IP。
Username输入的是jetson xavier nx的用户名
Password输入的是jetson xavier nx的密码
点击Install就会开始安装到板子上了。(安装时板子需要开启着)
但因为我们是EMMC版本,内存只有16GB,安装后内存会沾满,所以这一步先不执行。
先将系统迁移至固态中,有足够的内存,我们才安装。
系统迁移
参考我另一篇博客:Jetson Xavier NX-EMMC系统迁移
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)