晓查 发自 凹非寺
量子位 报道 | 公众号 QbitAI
英伟达最近发布了Jetson Xavier NX,这是一个用于在无人机、汽车和机器人等边缘设备上的AI系统模块。
Jetson Xavier NX的大小仅相当于一张信用卡,可以为AI工作负载提供21 TOPS的算力,而功耗最高仅为15瓦。
英伟达表示,它是英伟达Jetson家族的新成员,兼具Nano的小巧尺寸和Xavier的超强性能。
Jetson Xavier NX将于明年3月开始发售,价格399美元。
规格参数
CPU:6核NVIDIA Carmel 64位 ARMv8.2,主频1400MHz (6MB二级缓存 + 4MB三级缓存)
GPU:384核NVIDIA Volta,主频1100MHz,48个张量核心
内存:8GB 128位 LPDDR4x,主频1600MHz,读写速度51.2GB/s
存储:16GB eMMC 5.1
显示:(2x) DP 1.4 / eDP 1.4 / HDMI 2.0 a/b @ 4Kp60
PCIe:(2x) PCIe Gen 3控制器, 5路 | 1×1 + 1×1/2/4
深度学习模块:双NVIDIA深度学习加速引擎(NVDLA)
视频:2×4K30fps编码,2×4K60fps解码
接口与尺寸:260针脚SODIMM, 70x45mm
电源:10W/15W, 5V输入
机器学习性能
与全尺寸Jetson AGX Xavier相比,Jetson Xavier NX的应用场景主要是小型商用机器人、无人机、高分辨率传感器、光学检测、网络录像机、便携式医疗设备以及其他工业物联网系统。
在这些案例中,进行边缘推理计算会受到空间和功耗的限制。
Jetson Xavier NX基于相同的Xavier SoC,仍使用Volta架构GPU,并拥有NVDLA机器学习加速核心。因此,对于推理任务,Jetson Xavier NX比Jetson Nano和Jetson TX2产品要快得多。

△ 图片来自Anand Tech
英伟达对Jetson系列的硬件进行了对比,分别测试了它们在图像分类、目标检测、姿态估计、语义分割等计算机视觉模型上的性能:
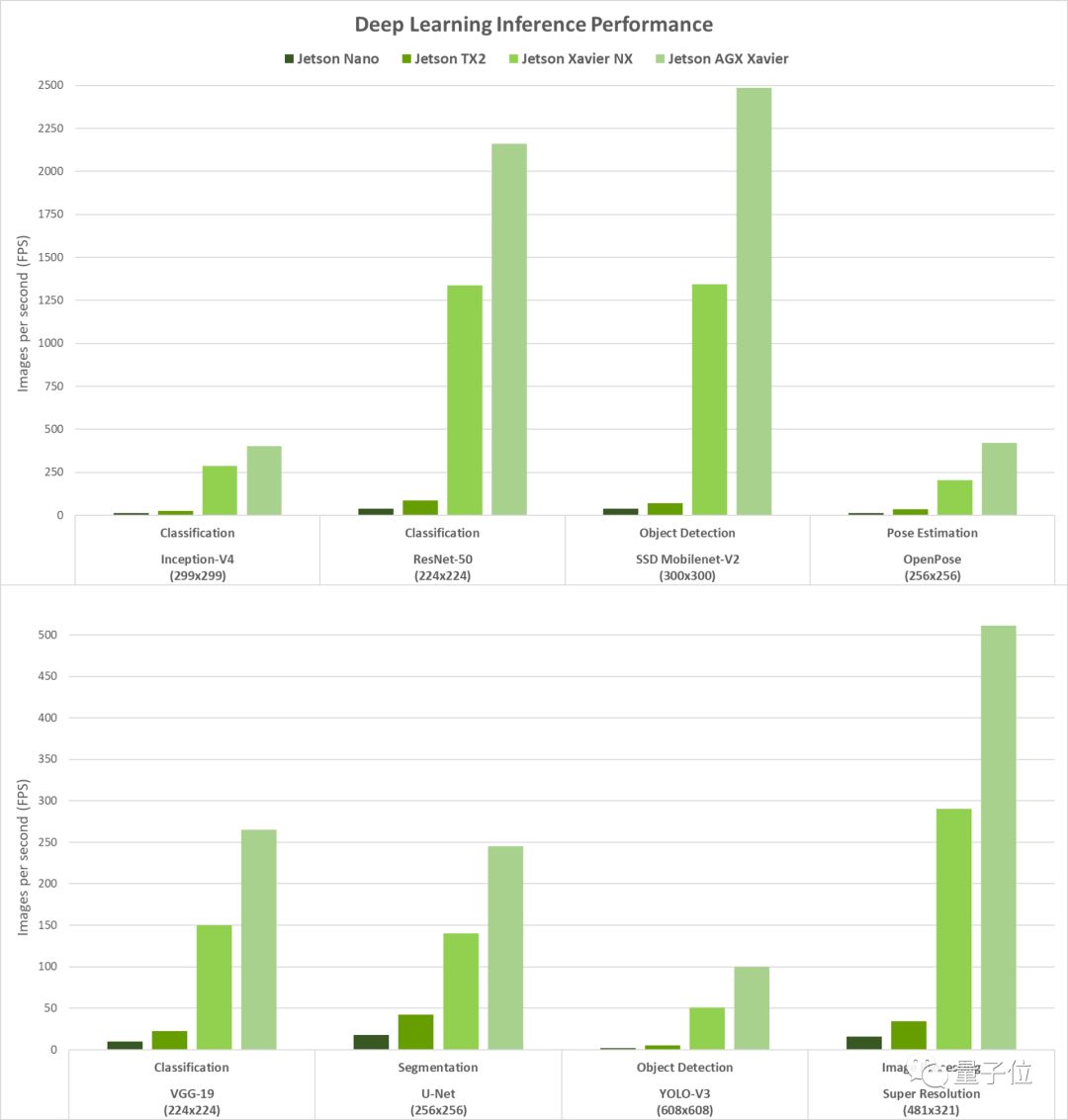
Jetson Xavier NX的性能与Jetson TX2相比高出15倍,功率相同,尺寸减少了25%。
在Jetson Xavier NX和Jetson AGX Xavier上,NVDLA引擎和GPU都以INT8精度同时运行,而在Jetson Nano和Jetson TX2上,GPU则以FP16精度运行。
Jetson Xavier NX中具有张量核心的Volta GPU最多可提供12.3 TOPS的算力,而每个深度学习加速引擎最多可提供4.5 TOPS的算力。
量子位&IDC中国将联合发布「2019中国人工智能行业白皮书」,并于12月6日MEET大会重磅发布,特请小伙伴们填写一下问卷,谢谢大家支持~
填写福利:发布后第一时间获得白皮书,AI内参、大会观众票3折优惠券。 点击下图即可填写问卷、领取问卷福利:
2019中国人工智能年度评选启幕,将评选领航企业、商业突破人物、最具创新力产品3大奖项,并于MEET 2020大会揭榜,欢迎优秀的AI公司扫码报名!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)