常用地面站软件主要有QGroundControl和MissionPlanner两种
下面以mission planner来介绍如何使用地面站软件进行固件升级和传感器校准
一、PixHawk飞控配置
 www.pixhawk.com
www.pixhawk.com
PixHawk官网:http://www.pixhawk.com/
1.1 硬件配置
- 主处理器:32位STM32F427,主频168 MHz ,256 KB RAM,2 MB Flash
- 备用处理器:独立供电32位STM32F103故障保护协处理器
- 传感器:双 3轴加速度计(据说可确保绝大部分情况下可剔除单加速度计可能产生的混淆噪声,极大改善飞行稳定性)、磁力计(确认外部影响和罗盘指向)、双陀螺仪(测量旋转速度)、气压计(测高)、内置罗盘、支持外置双GPS
- 集成的备份、超控、故障保险处理器
- microSD 插槽用于日志等用途, 5个 UARTs, CAN, I2C, SPI, ADC,等
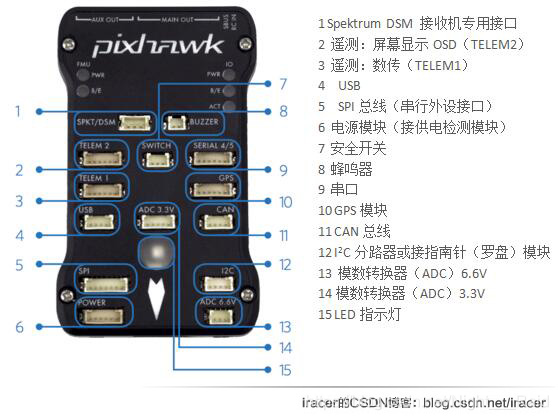
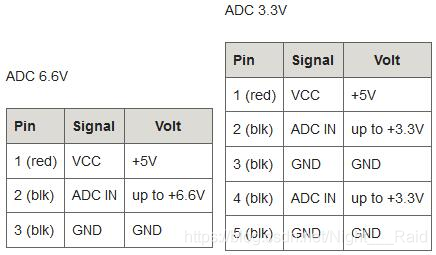
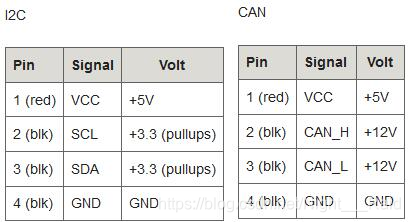
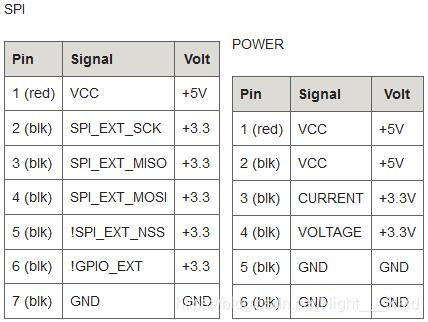
1.2 接口定义
PixHawk接口定义如下图所示:
正面
两侧与底部

顶部
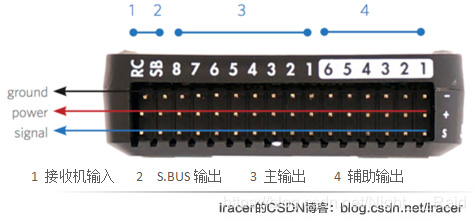
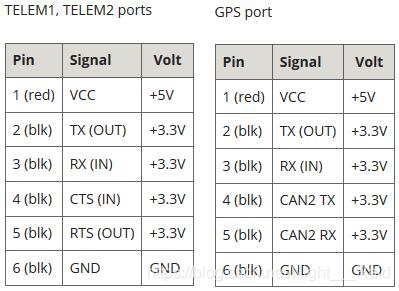
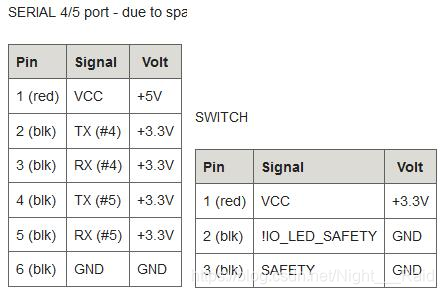
1.3 引脚定义
接口与引脚定义:http://www.pixhawk.com/modules/pixhawk
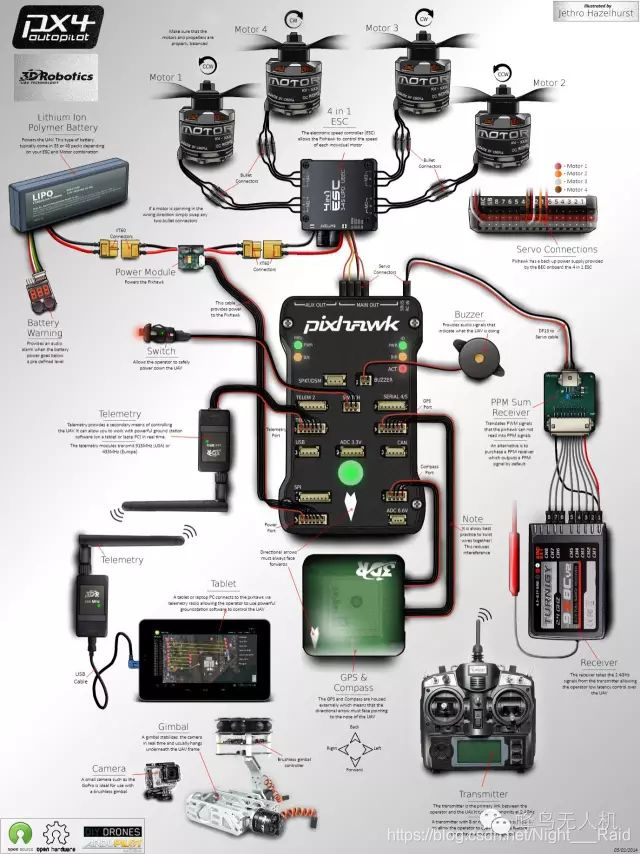
1.4 PX4无人机硬件连接
二、安装地面站软件
安装地面站软件(MissionPlanner)
- 本机安装版本:v1.3.71
- 安装平台:Windows
- 下载地址:https://firmware.ardupilot.org/Tools/MissionPlanner/
 注意: 每个版本都有zip和msi两个下载链接,如果电脑之前从未装过类似地面站软件,请选择带有msi后缀的安装版本,此版本会一并安装驱动,否则待会地面站安装成功,电脑也没法识别飞控。
注意: 每个版本都有zip和msi两个下载链接,如果电脑之前从未装过类似地面站软件,请选择带有msi后缀的安装版本,此版本会一并安装驱动,否则待会地面站安装成功,电脑也没法识别飞控。
未完待续。。。
https://blog.csdn.net/iracer/article/details/52718346
双罗盘校准https://blog.csdn.net/SimuArch/article/details/90757597
pixhawk中常出现的13种飞行模式:https://wenku.baidu.com/view/df0914fe55270722192ef7f3.html
pixhawk飞控基础调试教程步骤(B站):https://www.bilibili.com/video/BV1m7411Z7je?p=8
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)