作者团队在近期从Alitum Designer转战到立创EDA专业版。在习惯AD的工作方式后,转到立创EDA专业版后磨合了很长一段时间。现将原来AD中的功能对应到立创EDA中的高级功能像大家分享。欢迎大家一起交流学习~
本帖将作为功能帖长期更新,望大家放心,一般不会突然失联,望各路大佬监督。
本帖适用于从AD转到立创EDA专业版的专业人员,同样也适用于学会了简单PCB绘制的初学者。
官网在线学习文档:立创EDA专业版-使用教程
。。。前期铺垫较多,可直接省略,切入正题:
1、快捷键设定与修改
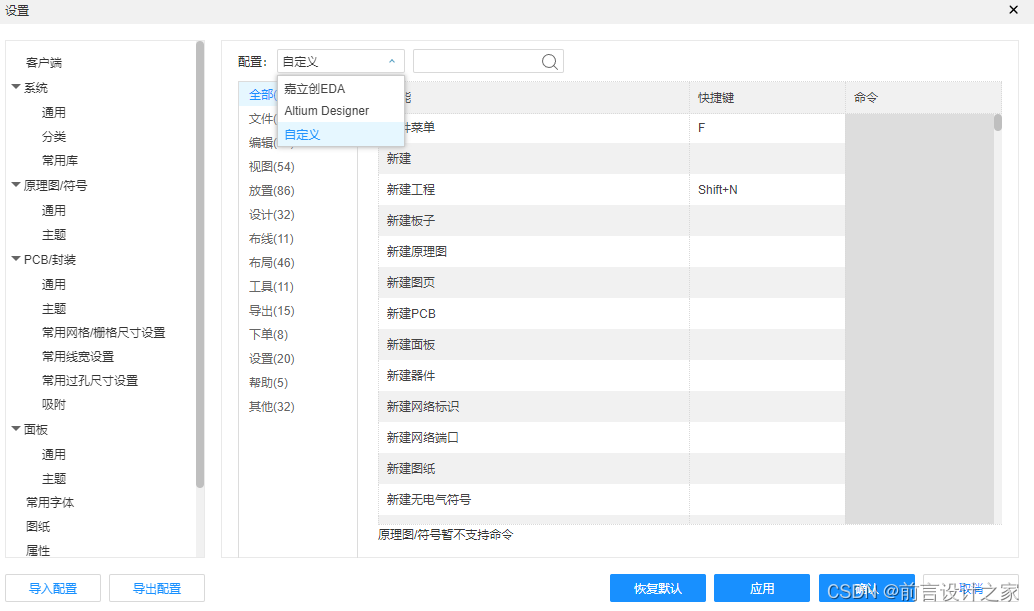
在嘉立创EDA专业版中,快捷键开始发挥作用。对于原来AD用户,可以将快捷键配置为AD模式,在这个模式下,快捷键的设置会尽量的贴近AD的快捷键配置。注意笔者建议在修改到AD模式后取消工具栏里面下单的快捷键“O”,因为个人感觉实在是没有这个必要为下单这个及其不常用的功能添加一个快捷键。
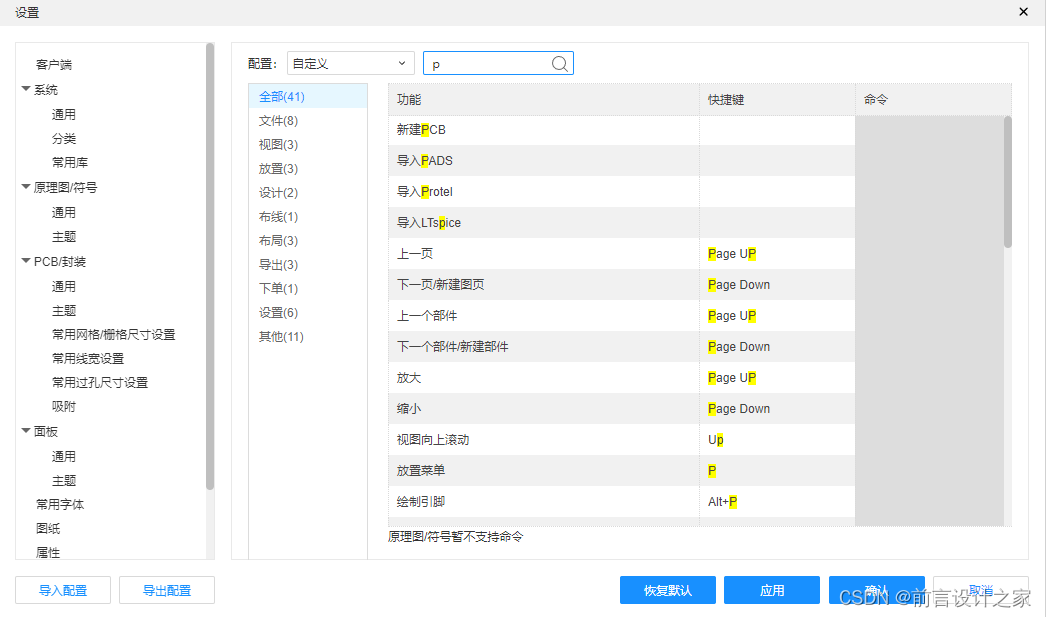
在快捷键设置界面搜索框中可以直接输入功能名称进行搜索,也可以使用快捷键内容进行搜索。比如我目前想要搜索与按键“P”绑定的相关快捷键(不分大小写)。
2、PCB和原理图的交叉选择
交叉选择在PCB绘制时候的使用频率非常的高。但是需要注意的是,在AD和嘉立创EDA专业版中支持单个原件或者多个原件的交叉选择(如下图所示)。在嘉立创EDA标准版中只支持单个原件的交叉选择,不支持多个原件的交叉选择。

3、原件在矩形区域排列(元件区域分布)
本功能需要配合多原件交叉选择一起使用。本功能的一个作用是在PCB刚从原理图导入的时候进行快速的分类。令一个功能就是快速将原件从画面外移动到画面内。
在AD中:使用工具-器件摆放-矩形区域排列(或者快捷键T,O,L)。
在嘉立创EDA专业版中:使用快捷键shift+P。
首次发帖,请大家多多批评指正~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)