镜像下载、域名解析、时间同步请点击 阿里巴巴开源镜像站
前言
最近,学习了胡老师的《ROS入门21讲》,在Ubuntu18.04上安装ROS过程中遇到了一些问题,解决这些问题耗费了大半天,故通过本文进行详细安装介绍,以便其他学者在安装这块少花时间,把更多的精力放在研究上。
一、环境配置
我的环境:虚拟机VM+Ubuntu18.04+melodic
Ubuntu对应的ROS版本:

二、安装步骤
1.添加ROS软件源
输入命令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
输入命令:
$ sudo apt-key adv --keyserver"'hkp:/ OpenPGP Keyserver' --recv-keyC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更换软件源
安装之前一定要换源,不然下载特别慢。
第一步,打开【Ubuntu软件】,点击左上角的软件更新换源
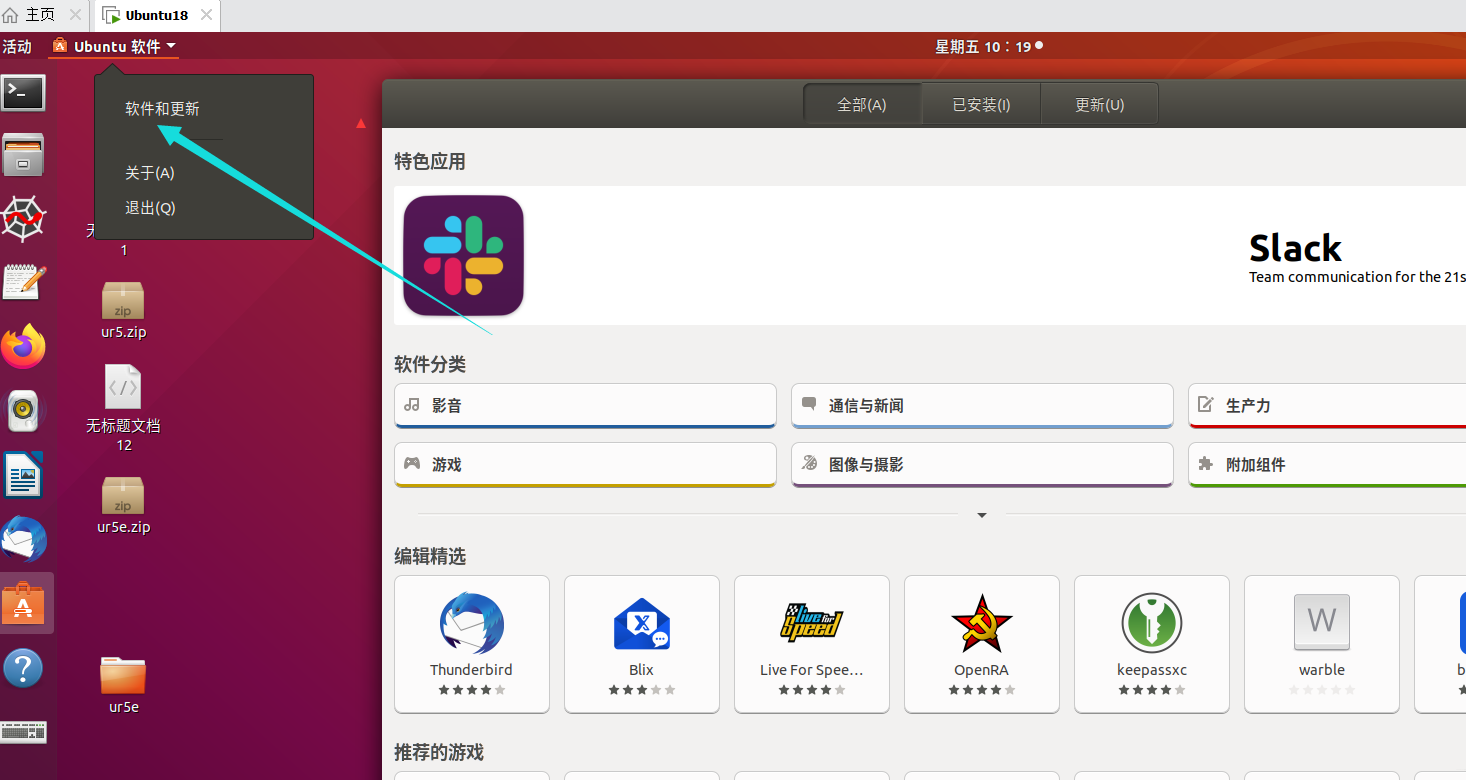
第二步:网址改为箭头所示地址

4.安装ROS
输入命令:
$ sudo apt-get update
$ sudo apt-get install ros-melodic-desktop-full
5.初始化rosdepc
输入命令1:
$ sudo apt-get install python-pip
$ sudo pip install rosdepc
输入命令2:
$ sudo rosdepc init
$ rosdepc update
如果输入命令2后还有没更新成功的,继续执行命令2,第二次应该会成功
6.设置环境变量
输入命令:
$ echo "source /opt/ros/melodic/setup.bash" >>~/.bashrc
$ source~/.bashrc
7.安装 rosinstall
输入命令:
$ sudo apt-get install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
8.验证ROS是否安装成功
通过运行一个小海龟的例程进行验证,以下每个命令都需要打开一个新终端执行。
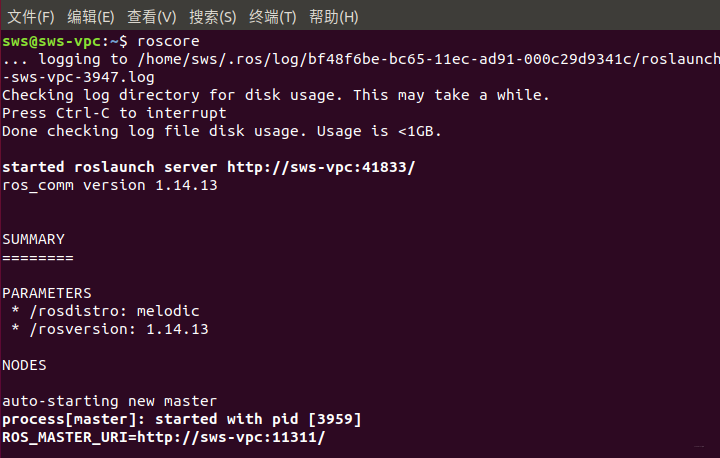
输入命令1:
$ roscore
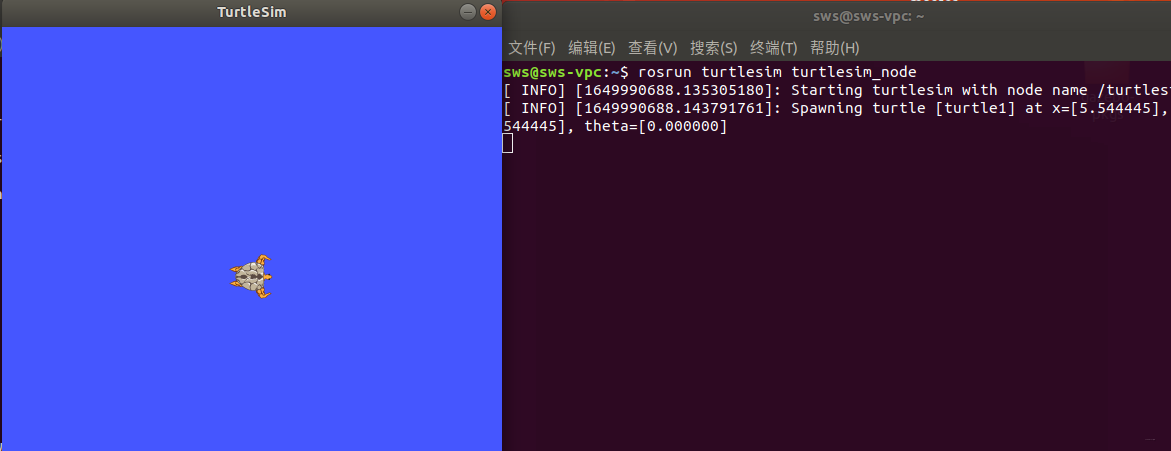
输入命令2:
$ rosrun turtlesim turtlesim_node
输入命令3:
$ rosrun turtlesim turtle_teleop_key
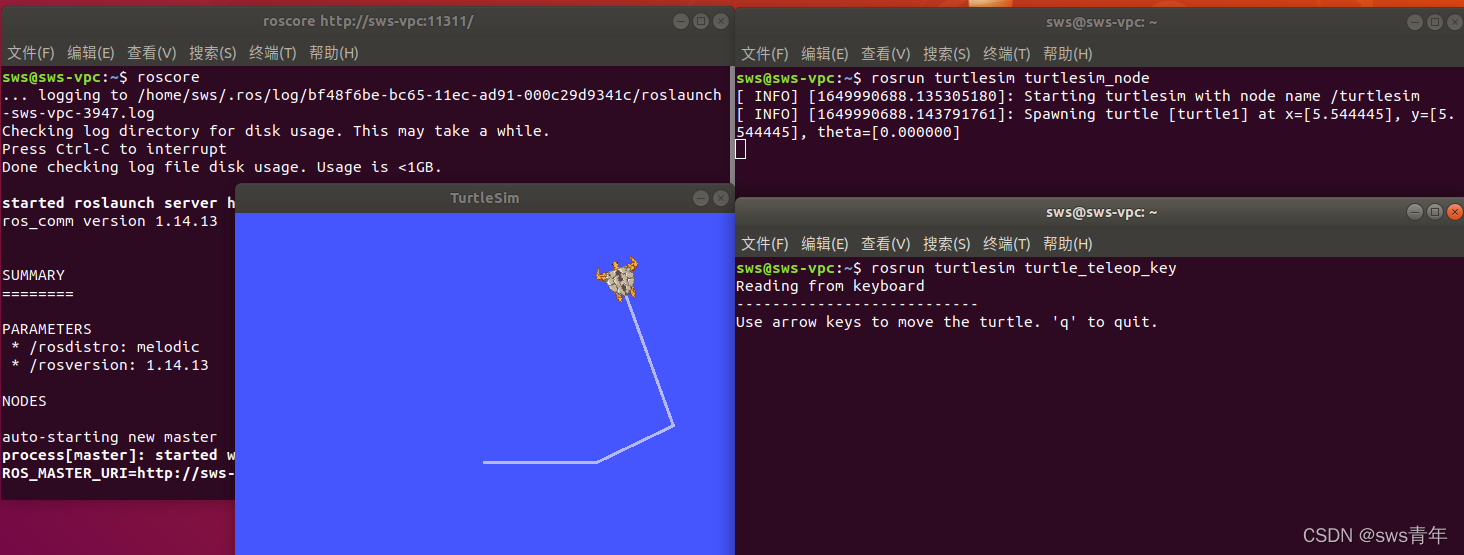
至此,小海龟运行成功,ROS安装成功。
总结
以上就是Ubuntu18.04安装ROS的整个过程,特别注意第5步初始化rosdepc,用rosdepc代替了rosdep,这样就不会报错了。
本文转自:https://blog.csdn.net/qq_43313298/article/details/124187225
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)