Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
T265 VS D435i
2023-05-16
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
T265
D435i
T265 VS D435i 的相关文章
Realsense D435i运行ORB-SLAM3
ORB SLAM3 根目录下的CMakeList txt opencv版本改为3 xff0c 目的是与ROS下的CMakeList txt指定的opencv版本相同 xff0c 都为3 否则会段错误 build sh build ros s
VINS_MONO+D435i Realtime运行
艰难地运行了三天 终于算是搞定了 主要的时间和精力都花在标定上了 总结一些需要注意的点 希望能对同样使用VINS MONO的人有帮助 先说一下我的初衷 其实是想要使用ORBSLAM3的Mono Inertial的 但是总是会初始化失败 图像
Gazebo仿真记录 Turtlebot3 + D435i
在Gazebo环境中在Turtlebot3上添加深度相机D435和IMU 步骤 1 准备工作 创建ROS工作空间 xff0c 下载turtlebot3相关代码和realsense2 description 模型文件放到工作空间下 Turtl
realsense D435i 模块在Ubintu16.04虚拟机与Windows下的安装方法
首先在Windows环境下 xff0c 测试设备是否可以正常工作 xff0c 只需下载 Intel官方给出的应用程序 Intel RealSense Viewer exe 即可 xff0c 地址为 https www intelrealse
python实现d435i深度相机测量两点之间的距离
本文介绍python方法实现intel公司realsense系列d435i深度相机测量彩色图像上两点之间的距离 原理很简单 xff0c 就是将相机获得的彩色图像流与深度流对齐 xff0c 这样彩色图像上的每个像素就会对应一个深度值 xff0
unbutu20.04版本+ros+D435i
注册服务器的公钥 span class token function sudo span apt key adv span class token parameter variable keyserver span keyserver ub
Jetseon TX2 & IntelRealsense D435i & Python
Jetseon TX2 amp IntelRealsense D435i amp Python amp Socket 一 IntelRealsense Python Wrapper GitHub 1 Installation pip ins
ubuntu 18.04 下 D435i SDK安装 ros-wapper安装 绘制rosbag 运行vins-mono离线/在线
1 参考blog 1 D435i Ubuntu18 04使用D435i运行VINS Mono 2 RealSenseD435i xff08 一 xff09 xff1a Ubuntu18 04 下的安装 使用和bag录制 xff0c 且解决
(librealsense就是SDK)T265驱动安装就是编译librealsense的源码(非ROS环境)
这里整体总结一下 xff0c T265驱动安装分为ROS环境和非ROS环境 xff0c 非ROS环境就是弄librealsense xff0c ROS环境就是弄reslsense ros 61 61 61 61 61 61 61 61 61
ROS下使用 Realsense D435i 运行ORBSLAM2_with_pointcloud_map
首先clone高博的代码 git clone https span class token operator span span class token operator span span class token operator spa
matlab 获取d435深度图像,realsense D435I获取RGB图、深度图和左右图
1 importpyrealsense2 as rs2 importnumpy as np3 importcv24 5 pipeline 61 rs pipeline 6 7 config 61 rs config 8 9 config e
C#下使用RealSense D435i获取图像,深度,导出.ply点云
首先需要在NuGet管理中安装RealSense库相关包 主要安装下面两个包 xff1a 代码中引入 xff1a using Intel RealSense 配置相机 var cfg 61 new Config using var ctx
【8-12】树莓派部署t265+px4飞控实现无人机视觉定位
在之前的文章中 xff0c 我们已经成功在树莓派 xff08 ubuntu mate 18 04 xff09 上部署了T265的追踪摄像头 本文将利用MAVROS协议 xff0c 将T265测量的位姿信息发送给px4固件 xff0c 实现室
Melodic + Realsense D435i 配置及错误问题解决
Melodic 43 Realsense D435i 配置及错误问题解决 安装环境 xff1a RealSense SDK安装1 克隆SDK2 安装相关依赖3 安装权限脚本4 进行编译与安装5 测试安装是否成功6 错误汇总0x01 进行编译
Intel Realsense Tracking Camera T265上手测试与总结
首先在官网 https www intelrealsense com zh hans get started tracking camera 上认真阅读使用教程 xff0c 让自己对 Realsense T265相机有一个初步的认识 了解过
Intel 深度摄像D435i 的标定
这个官方的标定链接 xff0c 先下载这个的pdf 文件在本地容易学习 xff1a https www intel com content www us en support articles 000032303 emerging tech
Jetson TX2在ROS下使用Realsense D435i跑rtabmap、octomap、VINS-Mono和ORB-SLAM2
使用环境 xff1a Ubuntu 16 04 JetPack 3 3 xff0c ROS Kinetic硬件设备 xff1a 英伟达Jetson TX2 xff0c 英特尔Realsense D435i 安装Realsense相关的相机驱
Ubuntu20.04LTS下安装Intel Realsense D435i驱动与ROS包
文章目录 目标一 D435i简介二 环境配置三 RealSense的SDK2 0安装四 ROS包安装五 摄像机CV的ROS包节点 六 问题排查 目标 在Ubuntu20 04LTS系统下安装D435i的驱动SDK2和ROS包 xff0c 实
ROS与深度相机入门教程:(1)Ubuntu16.04 在ROS中驱动Intel D435i深度相机
Intel在Github上开源了支持所有RealSense系列相机的SDK 包括了D400 SR300系列深度相机和T265双目跟踪相机 支持Linux Windows Mac OS以及Android 链接 https github com
D435i运行VINS-mono以及Kalib标定
D435i运行VINS mono以及Kalib标定 系统说明 xff1a Ubuntu 18 04 内核版本 xff1a 5 4 0 1 运行VINS mono 参考博客VINS xff08 D435i xff09 测试 问题 xff1a
随机推荐
jetson xavier nx 安装D435i
1 xff0c Realsense sdk安装 git clone https span class token operator span span class token comment github com jetsonhacks i
卸载opencv 安装cuda版本的opencv
第一推荐 https span class token operator span span class token comment zhuanlan zhihu com p 411901208 span 一 卸载opencv xff08
D435i VINS-Fusion环境搭建
参考网址 https span class token operator span span class token comment github com kuankuan yue VINS FUSION leanrning span 1
jetson nx 安装cuda 10.2
看到的另外两个方案 https span class token operator span span class token comment blog csdn net FRD2009041510 article details 4204
LIO-SAM ouster
1 ROS tested with Melodic sudo apt span class token operator span get install span class token operator span y ros span
数据分析业务场景 | 用户画像
一 概况 定义 是根据用户的一系列行为和意识过程建立起来的多维度标签 xff1b 是根据用户人口学特征 xff0c 网络浏览内容 xff0c 网络社交活动和消费行为等信息而抽象出的一个标签化的用户模型 xff1b 首要任务 xff1a 根据
D435i vins搜集资料
在D435i上运行VINS Mono 前面都测试好之后就可以再D435i上运行VINS Mone了 xff0c 这里特地感谢下博客如何用Realsense D435i运行VINS Mono等VIO算法 获取IMU同步数据的作者Manii x
mavros常用控制消息
数传 用于查看数传状态 xff1a span class token operator span mavros span class token operator span span class token function radio s
启动T265
室内T265定点飞行 先启动基本vio脚本 roslaunch p450 experiment p450 vio onboard launch 再启动控制脚本 roslaunch p450 experiment p450 vio contr
VINS标定---Ego-planner
1 检查realsense 和飞控的连接 查看飞控串口 ls span class token operator span dev span class token operator span ttyA span class token o
ego-planner框架和参数
drone id 对应飞机的编号 从0开始 map size xyz 地图场地大小 xff0c 给的目标点要在地图范围内 fx fy cx cy 相机内参 obstacles inflation 障碍物膨胀大小 是 飞机外廓尺寸的1 5倍
执行 install_geographiclib_datasets.sh 错误
https blog csdn net weixin 41865104 article details 119418901 在 usr share 新建GeographicLib文件夹 在 usr share GeographicLib 文
通过mavros的桥接连接qgc
fcu url指定的是飞控的连接方式 xff0c 设置飞控为正确的端口即可 gcs url指定的是QGC所在主机的IP xff0c 这个换为运行QGC主机的IP地址即可 如果不知道主机的IP地址可以用udp发布方式 gcs url span
ros在同一工作空间下调用其它功能包的头文件
A功能包需要调用B功能包的头文件 在B功能包CMakeLists txt中修改 去掉catkin package中的include注释 xff08 让别人能识别到自己的头文件 xff09 A功能包在find package时能识别到B功能包
千寻位置NTRIP网络基准站
端口选择NTRIP连接方式 xff1b 点击 Connect 输入Enter URL Enter URL格式 xff1a http NTRIP账号 xff1a 密码 64 rtk ntrip qxwz com 通道号 RTCM32 GGB
关于egoplanner fastplanner内PID的控制
Kp0 Kp1 Kp2 Kv0 Kv1 Kv2
如何描述数据分布的特征?
数据分布的特征可以从集中趋势 xff0c 离中趋势 xff0c 偏态和峰态三个方面进行描述 一 集中趋势 xff08 位置 xff09 是一组平均指标 xff0c 它反映了总体的一般水平或分布 1 平均数 分为 xff1a 简单平均数 xf
对于egoplanner的障碍物分析
根源 根据障碍物检查并分段初始轨迹 bool BsplineOptimizer span class token operator span span class token function check collision and reb
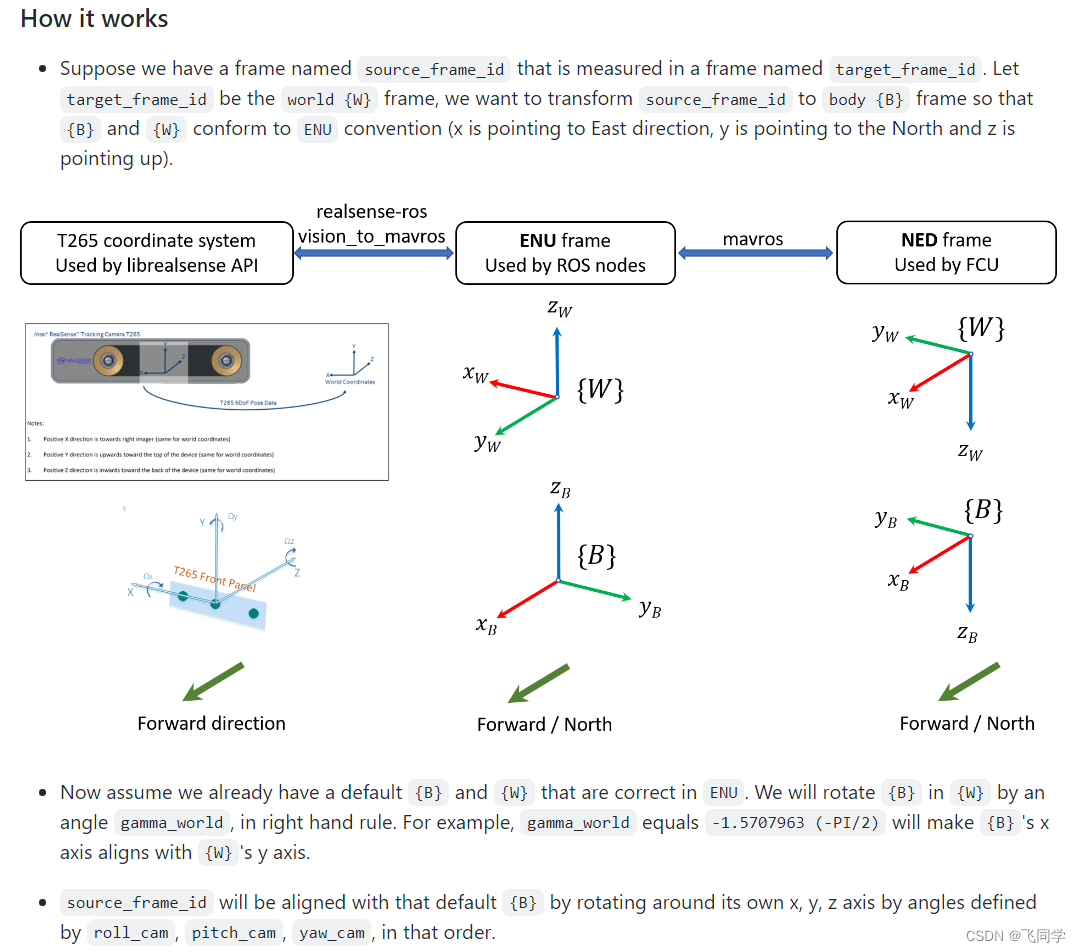
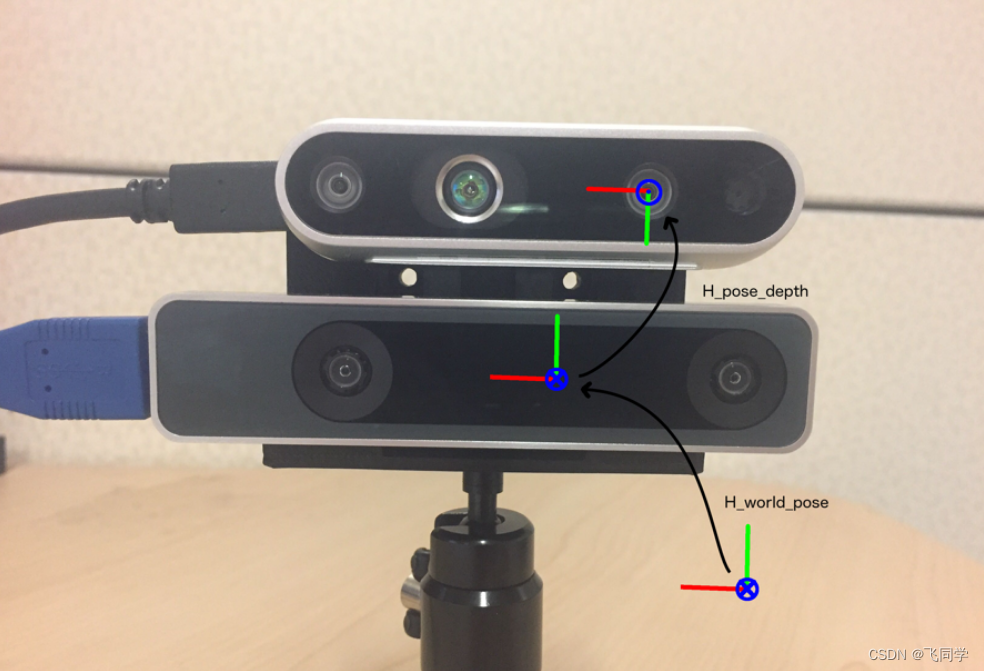
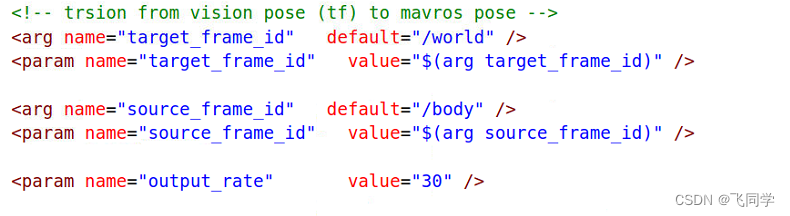
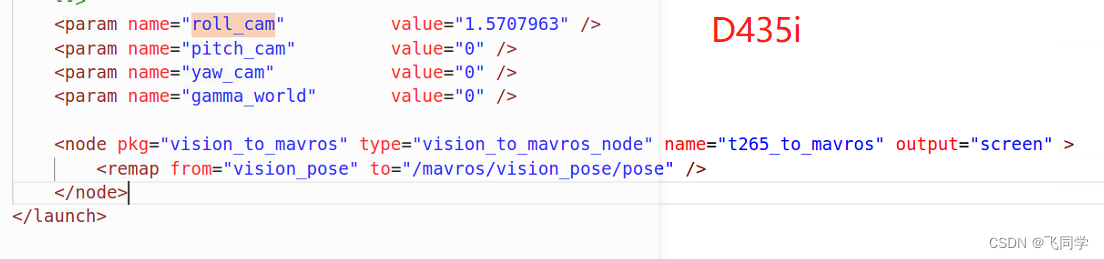
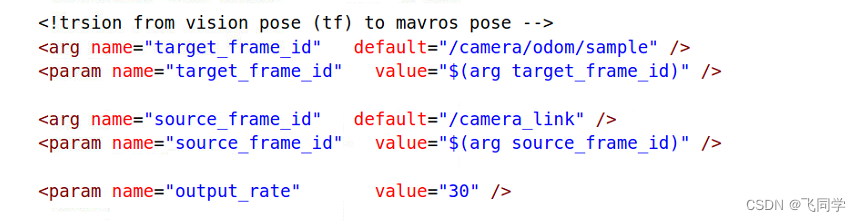
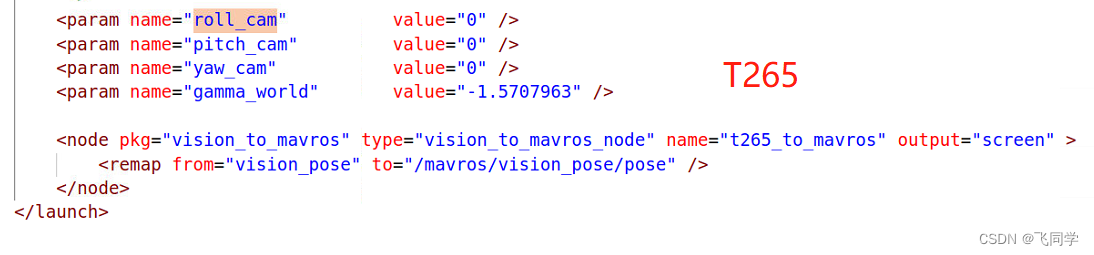
t265 通过mavros传递定位信息px4
https github com thien94 vision to mavros 通过话题 mavros vision pose pose 向PX4发送位置数据 t265两种安装方式 xff1a USB口朝右镜头向前和向下安装 如需其它方
T265 VS D435i
热门标签
zig
maxby
bit64
数据资产治理
数据资产
Java面试题合集
在线格式转换工具
java面试题套2
JNPF
Spark实验
电源自动测试系统
电源测试系统
DCDC电源模块
科研习惯养成
充电器测试
投稿
企业电子招投标
计算机工具
STM32课程设计
租赁系统
java办公管理
OA办公管理系统
北京软协