Motor
- 主要内容
- 前置知识
- CubeMX配置
- 代码
- 出现的问题
- 参考文献
主要内容
基于被我鸽了的电控作业
主控 STM32F429IGT6 电机TT小黄 模拟小车所以两路编码器
前置知识包括 PID PWM 定时器 LM2596 L298N等
前置知识
PID可以看我之前的这一篇PID简单算法
PWM可以看我之前的这一篇PWM
LM2596可调的降压模块 网上资料蛮多 也比较好用 拿表笔对着测一下转一下旋钮就行 注意不要接反 否则直接击穿就不能再用了
简单介绍一下L298N电机驱动模块 原理图如图
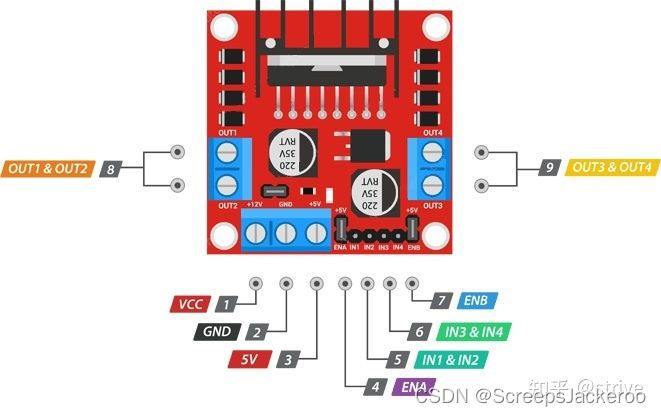 1脚接入12V及以下电压 3脚就能输出5V电压 给单片机供电 5 6由单片机接入PWM波 8 9端接电机 就能按照需要的或者调好的转速控制电机了
1脚接入12V及以下电压 3脚就能输出5V电压 给单片机供电 5 6由单片机接入PWM波 8 9端接电机 就能按照需要的或者调好的转速控制电机了
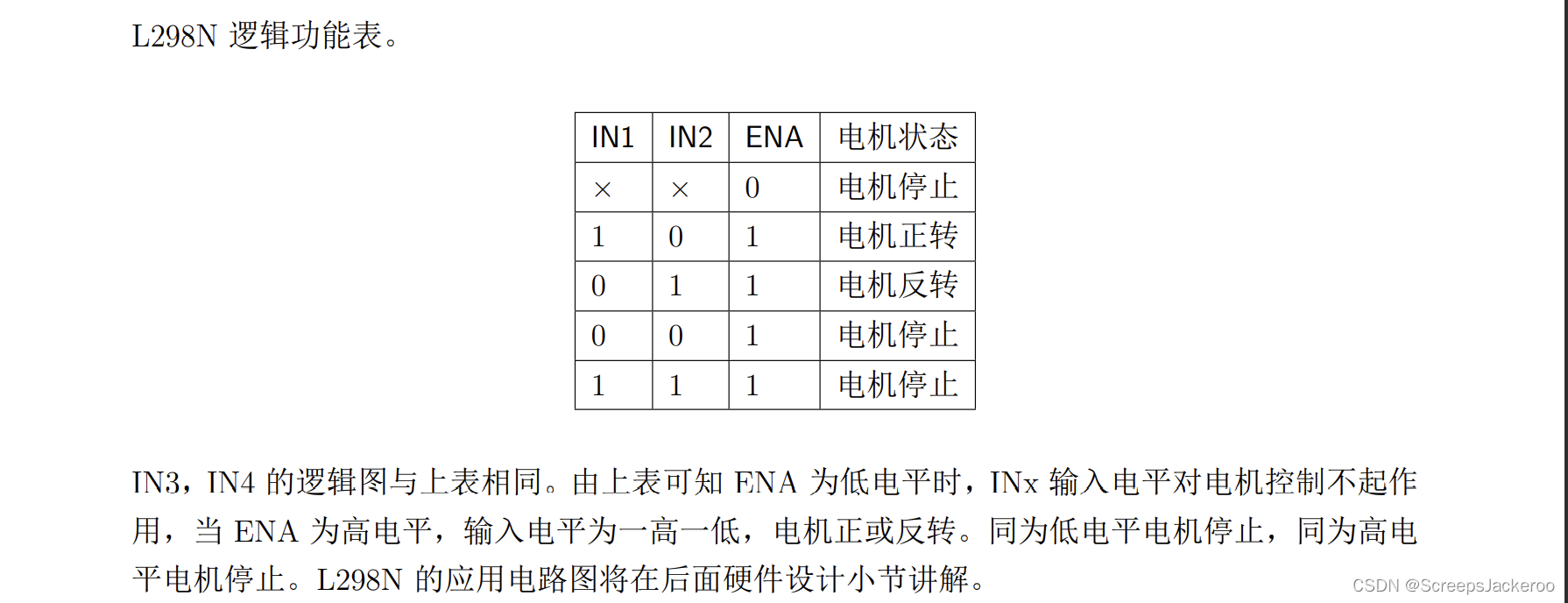
下图为真值表 通过信号接入也可以控制正反转
当然TB6612也行 性能可能更佳 但我用过的时候有一点bug 还烧过一次钽电容 用单独模块和降压电路安全电压下直接芯片烧了 后来画PCB集成之后好了 TB6612一块要十几块钱 L298N也就几块钱 性能也没什么差别 再带一块LM2596一样的效果
CubeMX配置
在单片机控制的时候注意 用定时器1和2 开编码器模式 由于输出量是路程 所以需要单开两个基础定时器6 7做计时 一个用来求转速 一个用来调PID 后续代码处可以看到 有一个电机结构体 把算好的速度作为结构体变量之一赋值
新建CubeMX工程 开时钟 TIM1和TIM2开编码器模式 TIM3开四路PWM TIM6和TIM7开计时 并且根据自己设定的频率算出来需要的定时器周期(PSC&ARR)并且开TIM6和TIM7中断 设置抢占优先级为1 如果6.5.x及以上的CubeMX记得调Systick优先级为0

(按照上述步骤开就行 这个图里还有别的引脚被别的功能用了 除了定时器开启状态外不具有参考性)
一个小tip:当你自己画板子或者你拿到的板子有些引脚没引出来 可以在搜索栏搜对应功能 一般都有别的引脚一样的功能(复用)改到那个引脚就好
代码
新建PID文件,Motor电机文件 adv底盘文件 名字不重要
PID的看前面那篇文章就有 结构体啥的基本不变 我就不多写了
motor.h:
typedef struct
{
int16_t Angle;
int32_t LastAngle;
float Speed;
int16_t TargetSpeed;
int32_t TargetAngle;
int32_t TotalAngle;
PID SpeedPID;
CascadePID AnglePID;
}Motor;
一些类似于#ifndef #endif的C语言背景知识这里就不多介绍了 少bug操作而已
motor.c:
void Motor_Cal(Motor *motor)
{
int32_t dAngle=0;
if(motor->Angle-motor->LastAngle<-30000)
dAngle=motor->Angle+(65535-motor->LastAngle);
else if(motor->Angle-motor->LastAngle>30000)
dAngle=-motor->LastAngle-(65535-motor->Angle);
else
dAngle=motor->Angle-motor->LastAngle;
motor->TotalAngle+=dAngle;
motor->Speed = (float)dAngle/(4*13*48)*50*60;
motor->LastAngle=motor->Angle;
}
前面if里面是对角度的越界处理 比如你的LastAngle有点大 一步跨到ARR之外了 就自动从0开始了 所以做这个判断
速度的计算公式 因为用了AB相 相当于四倍频 电机用的TT 13个刻度 减速比1:48 因电机而异 定时器周期前面设置的对应值 *60换成分钟
void Motor_SetPWM(float PWM1,float PWM2)
{
if(PWM1>0)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, PWM1);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 0);
}
else
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 0);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2,ABS(PWM1));
}
if(PWM2>0)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, PWM2);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 0);
}
else
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 0);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, ABS(PWM2));
}
}
通过你设置的PWM来规定正反转 写到对应通道 用上面L298N的真值表对应
adv.h
typedef struct
{
uint8_t mode;
float averge;
Motor motors[2];
}ADV;
void Adv_init()
{
HAL_TIM_Base_Start_IT(&htim6);
HAL_TIM_Base_Start_IT(&htim7);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);
HAL_TIM_Encoder_Start(&htim1,TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL);
Adv_PIDInit();
}
void Adv_PIDInit()
{
PID_Init(&chassis.motor[0].SpeedPID,200,0.005,0,10000,10000);
PID_Init(&chassis.motor[1].SpeedPID,200,0.006,1,10000,10000);
PID_Init(&chassis.motor[0].AnglePID.inner,200,0.005,0,10000,10000);
PID_Init(&chassis.motor[1].AnglePID.inner,200,0.006,1,10000,10000);
PID_Init(&chassis.motor[0].AnglePID.outer,0.2,0,0.5,40,40);
PID_Init(&chassis.motor[1].AnglePID.outer,0.2,0,0.5,40,40);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef*htim)
{
if(htim==&htim6)
{
Adv.motor[0].Angle=__HAL_TIM_GET_COUNTER(&htim1);
Adv.motor[1].Angle=__HAL_TIM_GET_COUNTER(&htim2);
Motor_Cal(&Adv.motor[0]);
Motor_Cal(&Adv.motor[1]);
}
if(htim==&htim7)
{
for(uint8_t i=0;i<2;i++)
{
PID_SingleCalc(&Adv.motor[i].SpeedPID,Adv.motor[i].TargetSpeed,Adv.motor[i].Speed);
}
Motor_SetPWM(Adv.motor[0].SpeedPID.output,Adv.motor[1].SpeedPID.output);
}
}
在回调函数里面分别实现这两个功能 按设定的周期走的
主函数都不用动 除了调用底盘函数
Adv_init();
如果后续还有功能要加 比如巡线等等 直接在底盘里面修改就行
出现的问题
没啥问题 改了几个参数自己又跑了一遍 效果挺好 就是F4有点大材小用 用F1C8T6最小系统就能实现
参考文献
github暂时不太好使 后续补完整工程
1.野火零基础教程&电机教程 野火论坛或者资料下载中心可以下载 东西可太全了 百度一搜就行
2.吉甲电控yyds 学到不少东西 可惜上岁数了打不了rm寄
2022.7.16 加个广告 欢迎各位来看新写的文章 关于简单控制GM6020电机 上硬件实测好用
RM_EE_Note 1
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)