👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
2.1 Rot_Pen_FLC
2.2 Rot_Pen_LQR
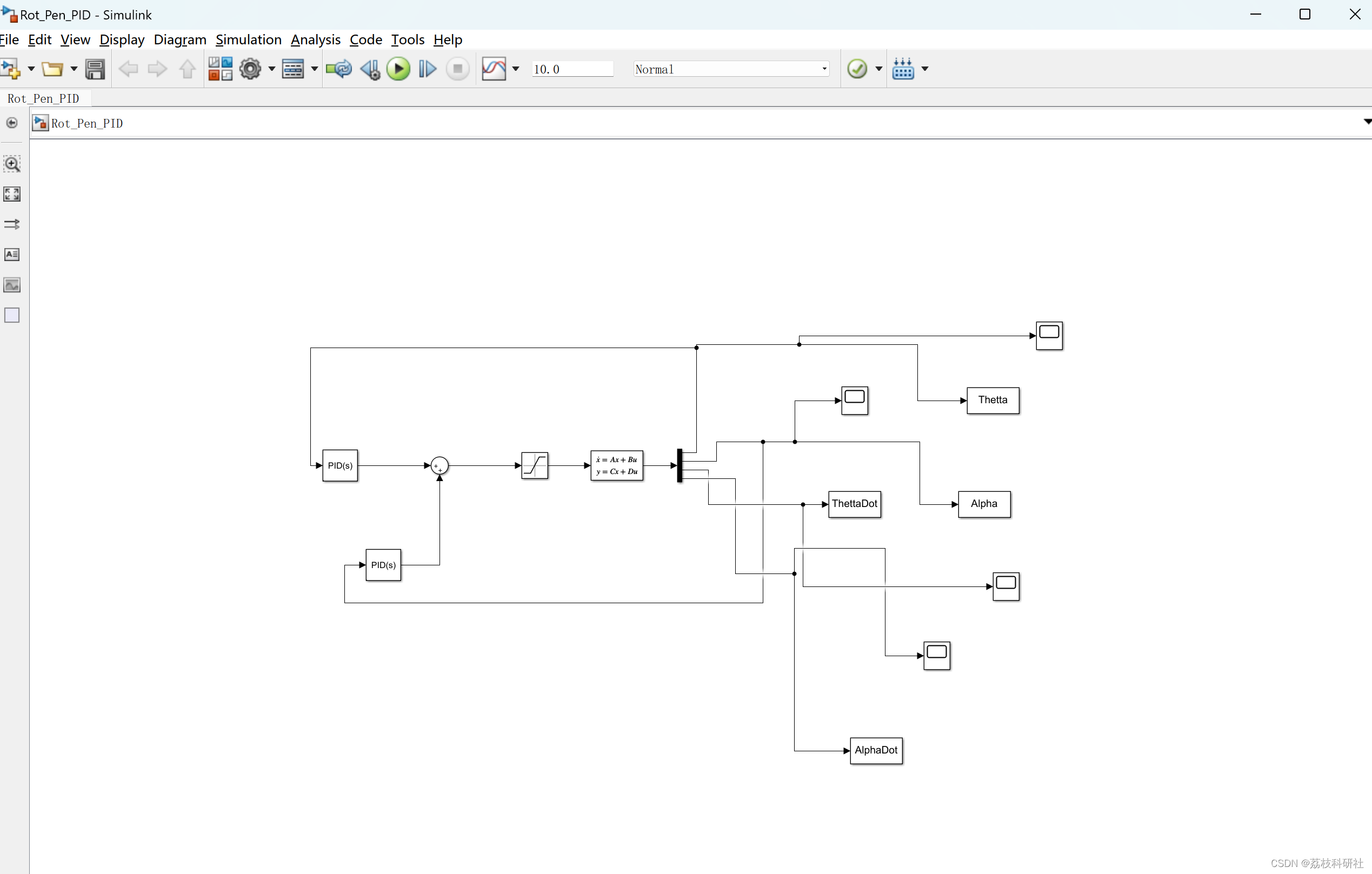
2.3 Rot_Pen_PID
🎉3 参考文献
🌈4 Matlab代码、Simulink、文章讲解

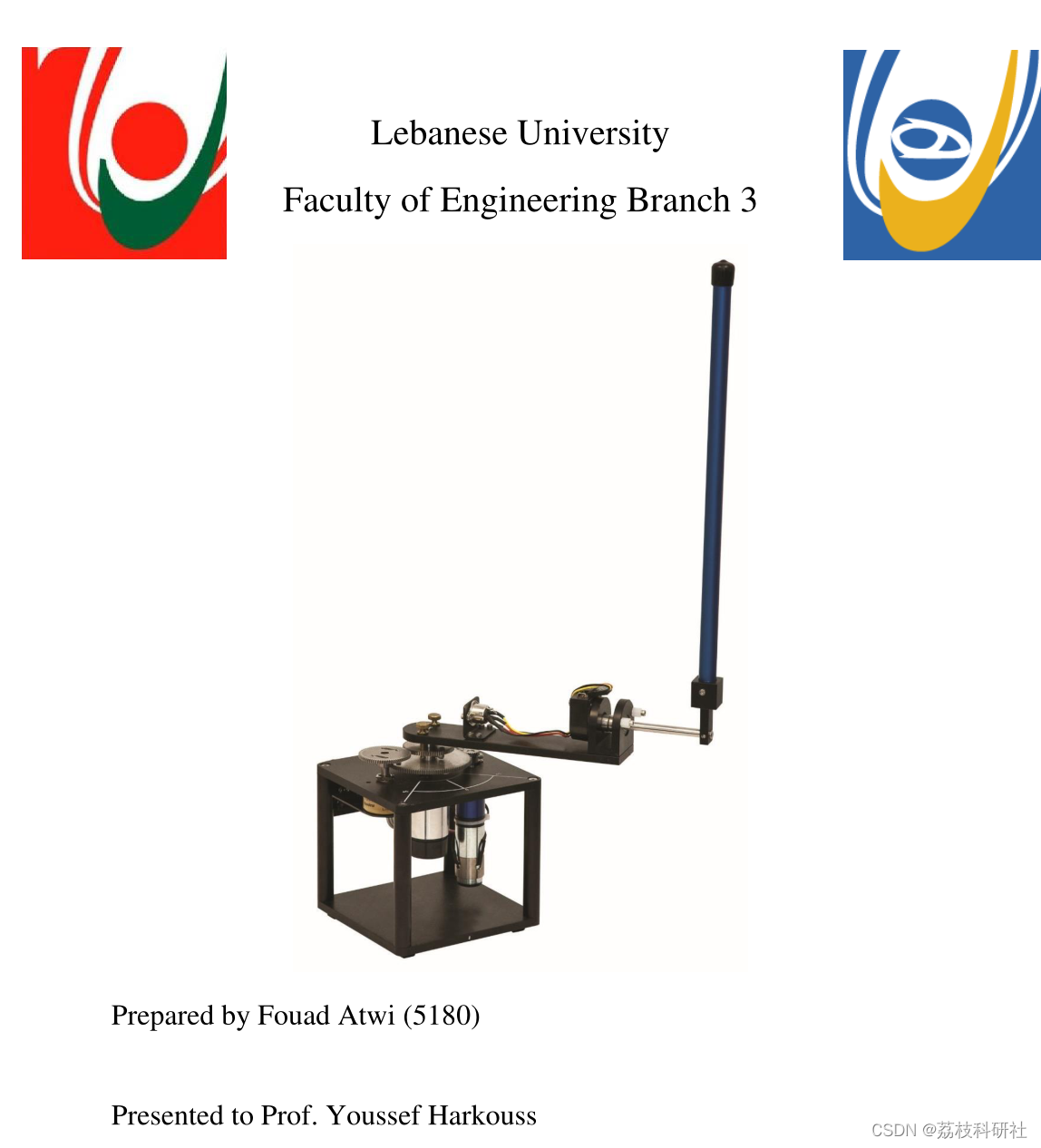
💥1 概述
该项目旨在通过将几种控制技术应用于旋转倒立摆并研究其响应来测试它们的能力。
本课题测试的控制方法有模糊逻辑控制器、PID控制器和全状态反馈控制器,使用MATLAB和Simulink实现。
原文摘要:
This project aims to test the capabilities of several control techniques by applying them on a rotary inverted pendulum and studying its response. Control Methods tested in this project are Fuzzy Logic controllers, PID controllers and Full State Feedback controller The implementation is done using MATLAB and Simulink.
目录;

📚2 运行结果
2.1 Rot_Pen_FLC



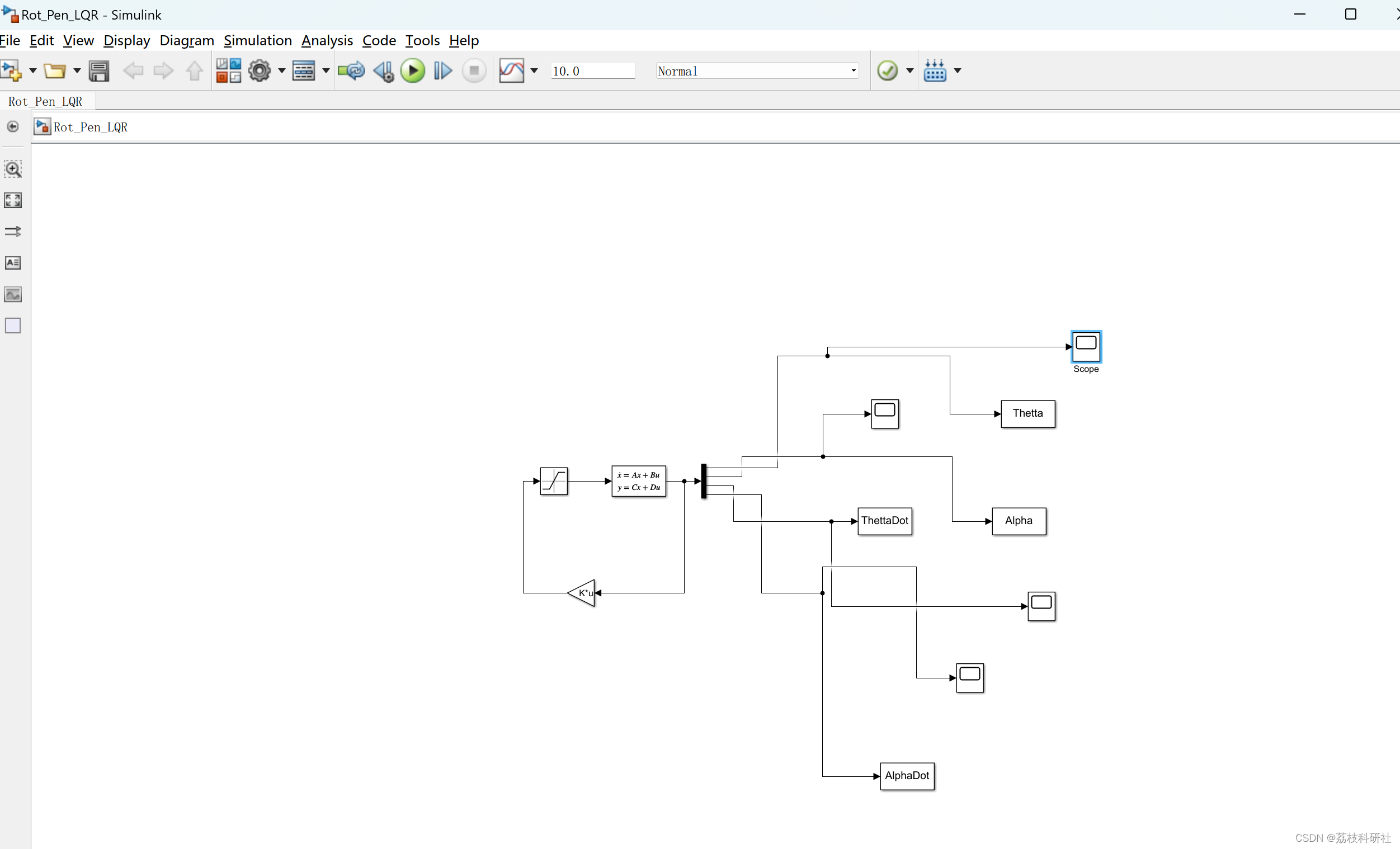
 2.2 Rot_Pen_LQR
2.2 Rot_Pen_LQR


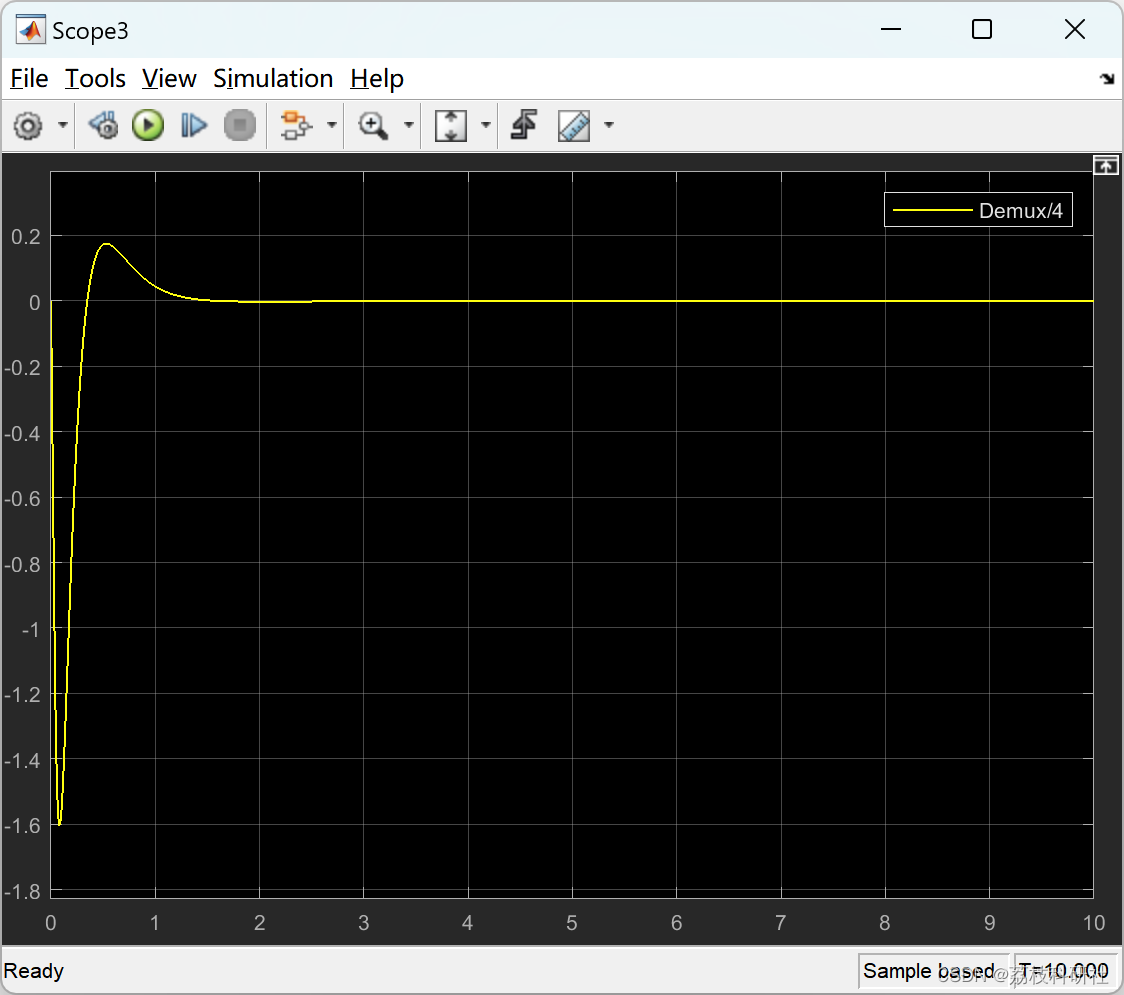

2.3 Rot_Pen_PID




close all;
axis([-0.1 0.1 -0.1 0.1 0 0.4]);
for t= 1:1000
alpha=Alpha(t);
thetta=Thetta(t);
rod=line([0 , r*cos(thetta)],[0 , r*sin(thetta)], [0 , 0] , 'linewidth',1);
stand=line([r*cos(thetta) , r*cos(thetta)] , [r*sin(thetta),r*sin(thetta)],[0 , 0.13]);
pivot=line([r*cos(thetta), (r+0.01)*cos(thetta)], [r*sin(thetta), (r+0.01)*sin(thetta)] , [0.13 0.13]);
pendulum=line([(r+0.01)*cos(thetta), (r+0.01)*cos(thetta)+lp*sin(alpha)*sin(thetta)],[(r+0.01)*sin(thetta),(r+0.01)*sin(thetta)+lp*sin(alpha)*cos(thetta)], [0.13 , 0.13+lp*cos(alpha)],'linewidth',3);
pause(0.007);
delete(rod);
delete(stand);
delete(pivot);
delete(pendulum);
end
close all;
axis([-0.1 0.1 -0.1 0.1 0 0.4]);
for t= 1:1000
alpha=Alpha(t);
thetta=Thetta(t);
rod=line([0 , r*cos(thetta)],[0 , r*sin(thetta)], [0 , 0] , 'linewidth',1);
stand=line([r*cos(thetta) , r*cos(thetta)] , [r*sin(thetta),r*sin(thetta)],[0 , 0.13]);
pivot=line([r*cos(thetta), (r+0.01)*cos(thetta)], [r*sin(thetta), (r+0.01)*sin(thetta)] , [0.13 0.13]);
pendulum=line([(r+0.01)*cos(thetta), (r+0.01)*cos(thetta)+lp*sin(alpha)*sin(thetta)],[(r+0.01)*sin(thetta),(r+0.01)*sin(thetta)+lp*sin(alpha)*cos(thetta)], [0.13 , 0.13+lp*cos(alpha)],'linewidth',3);
pause(0.007);
delete(rod);
delete(stand);
delete(pivot);
delete(pendulum);
end
使用模糊逻辑/PID/LQR FSF 稳定倒立摆研究(Matlab&Simulink实现)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
🌈4 Matlab代码、Simulink、文章讲解
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)