👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🌈3 Matlab代码实现
🎉4 参考文献

💥1 概述
粒子滤波是一种用于估计系统最优状态的方法
,
无 法 直接用于优化问题的求解。
本文将数据包络优化问题的最优解的寻找过程转化为粒子滤波的系统状态估计问题,
从而可以利用粒子滤波的基本原理来求解优化问题。对于一个优化问题,
其最优解的迭代求解过程可以被视为一个动态时变系统:
迭代次数可以视为离散时间
,
每次迭代过程中的最优解视为系统的状态,
每次迭代得到的最优解的变化过程可以被视为系统的状态更新,
优化问题的目标函数可以被视为系统的测量函数。
因此
,
在获得足够的采样粒子的情况下,
系统的最小方差估计即优化问题的最优解即可根 据粒子滤波的方法迭代搜索得到。
因 此
,
该 动 态 时 变 系 统 的状态必须随着迭代的过程不断地向待优化问题的最优解方向的邻域移动,
以使得在迭代结束之后
,
系统状态收敛于目标函数的全局最优解。
PF
算法是一种获得状态最小方差分布过程
,
利用贝叶斯估计递推通过非参数化的蒙特卡洛模拟来
实现的一种算法
,
具体是在状态空间中查找一组随机样本用以近似后验概率密度函数,
不进行积分计算,
取而代之的是样本均值
。序列重要性采样和重要性重采样组成了标准 PF
算法
,
算法流程图
如图
1
所示
。
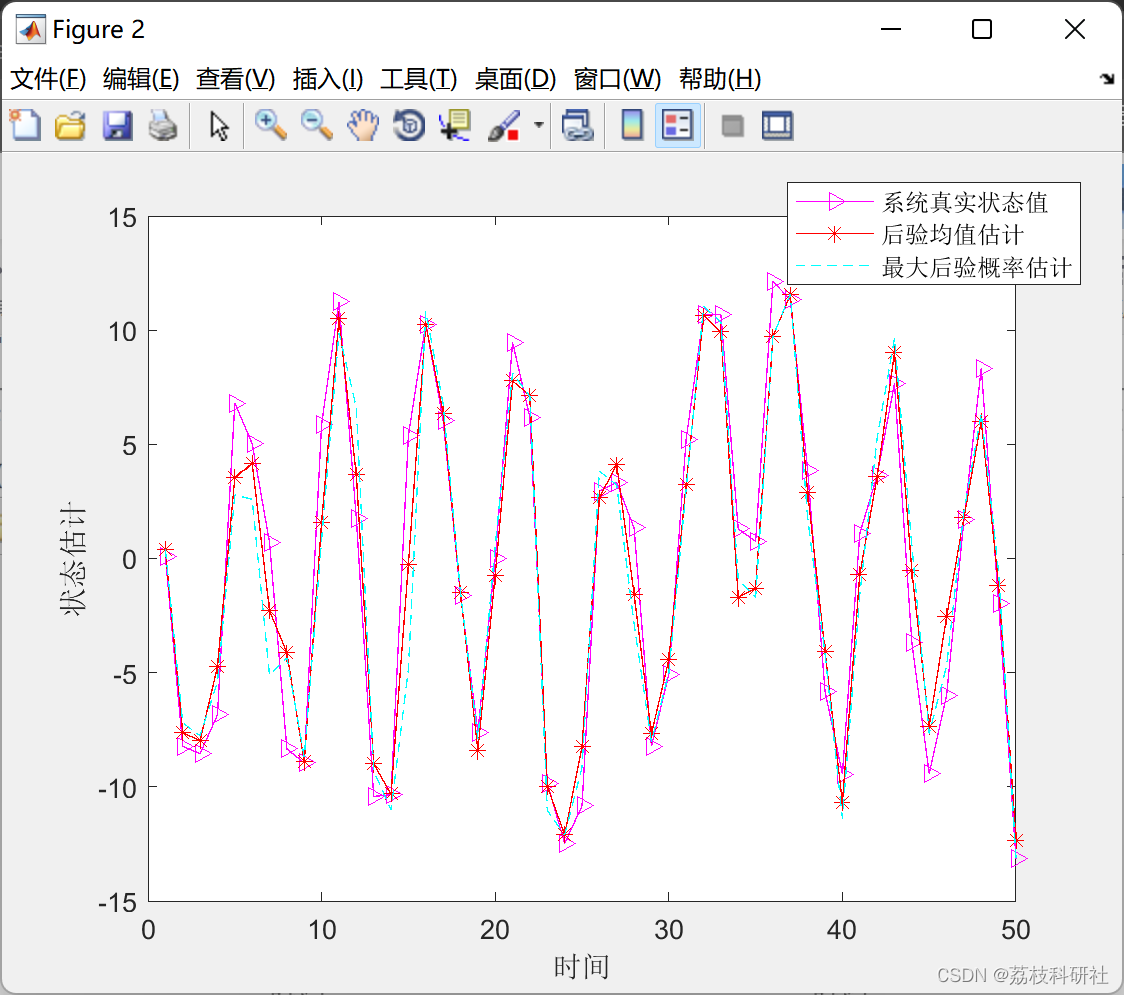
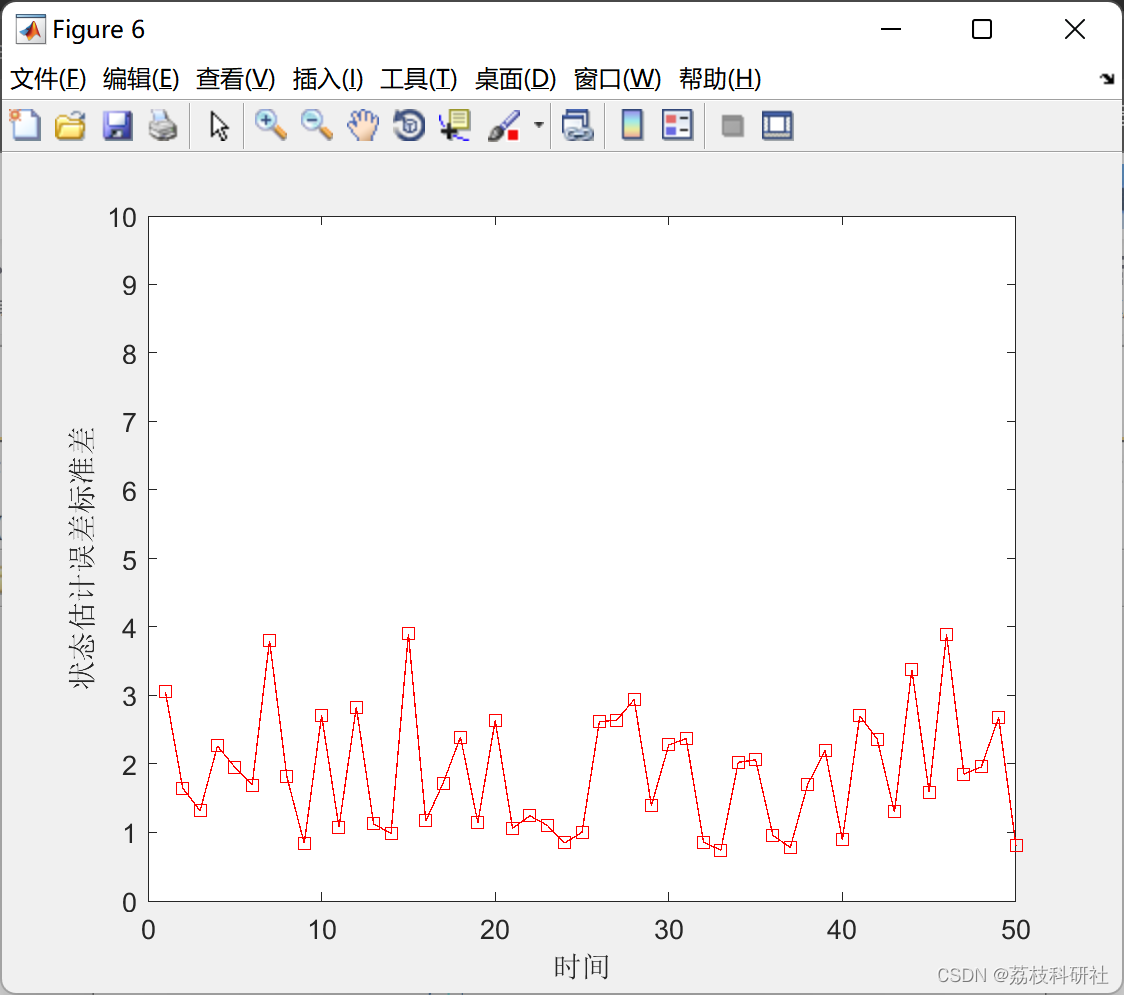
📚2 运行结果



部分代码:
%计算后验均值估计、最大后验估计及估计方差
Xmean_pf=mean(Xpf);%后验均值估计,及上面的第四步,也即粒子滤波估计的最终状态
bins=20;
Xmap_pf=zeros(T,1);
for k=1:T
[p,pos]=hist(Xpf(:,k,1),bins);
map=find(p==max(p));
Xmap_pf(k,1)=pos(map(1));%最大后验估计
end
for k=1:T
Xstd_pf(1,k)=std(Xpf(:,k)-X(k,1));%后验误差标准差估计
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%画图
figure();clf;%过程噪声和测量噪声图
subplot(221);
plot(v,'c--');%测量噪声
xlabel('时间');ylabel('测量噪声');
subplot(222);
plot(w,'r->');%过程噪声
xlabel('时间');ylabel('过程噪声');
subplot(223);
plot(X,'g-h');%真实状态
xlabel('时间');ylabel('状态X');
subplot(224);
plot(Z);%观测值
xlabel('时间');ylabel('观测Z');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure();
k=1:dt:T;
plot(k,X,'m->',k,Xmean_pf,'r-*',k,Xmap_pf,'c--');%注:Xmean_pf就是粒子滤波结果
legend('系统真实状态值','后验均值估计','最大后验概率估计');
xlabel('时间');ylabel('状态估计');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure();
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]黄国兴,杨泽铭,卢为党,彭宏,王静文.利用粒子滤波方法求解数据包络分析问题[J].计算机科学,2022,49(S1):159-164.
[2]孟祥元.一种改进粒子滤波目标跟踪算法研究[J].宿州学院学报,2022,37(09):12-15.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)