HandleLaserScanMessage()函数

作用:
- 利用 ToPointCloudWithIntensities函数 将ros中的数据转换为carto中定义的数据类型;
- 传入 HandleLaserScan() 函数中进行处理;
Note:
- sensor_msgs::LaserScan数据格式:
- PointCloudWithIntensities数据格式:
HandleMultiEchoLaserScanMessage() 函数同上类似;
HandlePointCloud2Message()函数
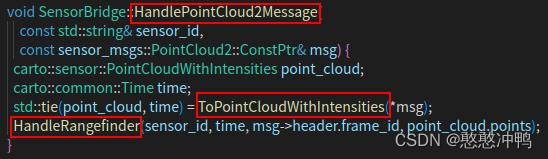
作用:
- 利用ToPointCloudWithIntensities函数 将ros中的数据转换为carto中定义的数据类型;
- 传入 HandleRangefinder() 函数中进行处理;
上面三个函数都调用了ToPointCloudWithIntensities函数,该函数根据传参数据格式不同进行了重载;
ToPointCloudWithIntensities()函数
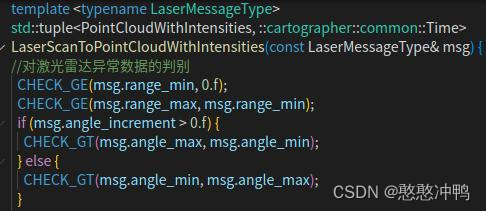
LaserScanToPointCloudWithIntensities()函数
模板函数,处理ros格式的sensor_msgs::LaserScan and sensor_msgs::MultiEchoLaserScan数据格式,得到PointCloudWithIntensities类型数据;
数据格式
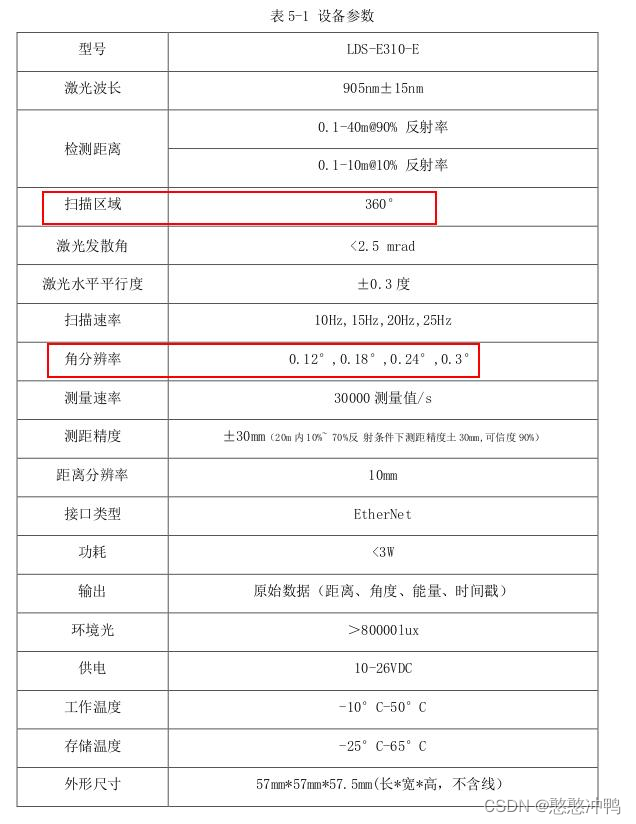
LaserScan(单回波激光雷达):

header: 消息头,包含了该消息的帧id、时间戳和坐标系信息。
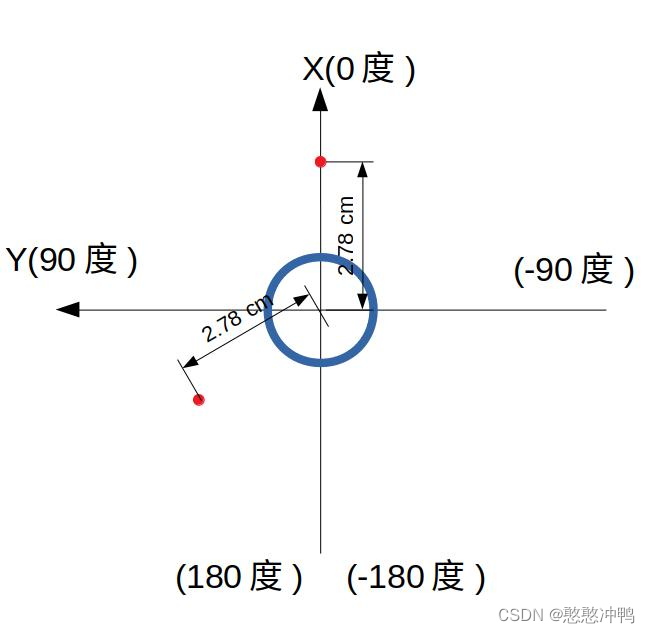
angle_min: 扫描起始角度,单位为弧度。(180度)
angle_max: 扫描终止角度,单位为弧度。(-180度)
angle_increment: 角度分辨率,即每个激光束之间的角度差,单位为弧度。(-0.18度)
time_increment: 时间分辨率,相邻两激光点的扫描时间增量,单位为秒。
scan_time: 一次扫描的持续时间,单位为秒。(0.06秒)
range_min: 能够测量到的最小距离值,单位为米。(0米)
range_max: 能够测量到的最大距离值,单位为米。(40米)
ranges: 扫描得到的距离值数组,按照顺序存放,单位为米。
intensities: 扫描得到的反射强度值数组,如果激光雷达不支持反射强度测量,则该字段为空。
MultiEchoLaserScan(多回波激光雷达):

程序逻辑
- 激光雷达异常数据判断
最终需要得到的数据格式:
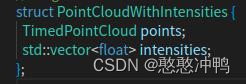

激光点在指定坐标系的坐标position;
激光点时间戳time;
激光点强度intensities;
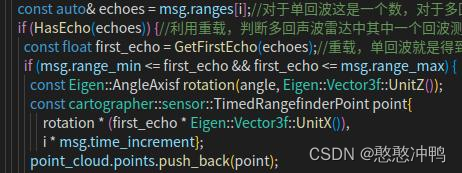
- point坐标获取
(1)以单回波雷达数据的处理为例,HasEcho判断测距数据是否为空;
(2)取ranges测距里面的第一个值,注意(ranges 里面的值是按 扫描起始角度->扫描终止角度 顺序存储的);
(3)判断数据在激光雷达有限测距范围内;
(4)根据测得的距离以及扫描起始角度,角度分辨率信息,循环计算每个扫描点在设置坐标系下的坐标,原理如图;
(5)这里还定义了第一次扫描点的时间为0,依次按照时间增量递增(与后面的时间戳定义有关);
(6)激光雷达长时间未扫描到障碍物没有办法建图;
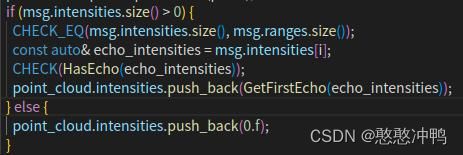
- intensities强度数据获取
(1)强度可以理解为障碍物对激光束的反射率;
(2)判断雷达原始数据中有强度数据,检查扫描点个数必须与强度数据对齐,即一个扫描点必须对应一个强度信息,满足则push到carto定义的强度数据中,否则push数据0进去;
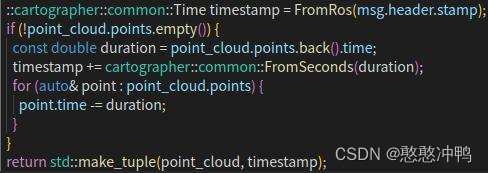
- time数据获取
(1)激光雷达每帧数据自带时间戳为开始扫描的时间;
(2)获取points数据时,最后一个点的points.time数据记录了扫描一帧的用时duration,时间戳为每帧扫描结束后的时间;
(3)相应的,每个扫描点记录的时间改为points.time-duration(其实就是保证这一帧数据的时间戳加上points.time是每个扫描点的扫描时间);
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)