一、TX2相关
1.1 图片
1.2 TX2介绍:
NVIDIA Jetson TX2------嵌入式领域的AI超级电脑
它是一台基于NVIDIA Pascal™架构的AI单模块超级计算机。它性能强大,外形小巧,节能高效,适合机器人、无人机、智能摄像机和便携医疗设备等智能终端设备。它支持 Jetson TX1 模块的所有功能,同时可以铸就更大型、更复杂的深度神经网络。
Jetson TX2 开发套件
款功能强大的开发者套件能够使主板的硬件功能和接口充分发挥效用,预装 Linux 开发环境。同时,它还支持 NVIDIA Jetpack SDK,包括 BSP、深度学习库、计算机视觉、GPU 计算、多媒体处理等众多功能。
具体参数如下:

二、上电
2.1上电准备
TX2
显示屏
双头的HDMI线
鼠标、键盘以及usb集线器
2.2 接线
TX2和显示器通过双头的HDMI线连接,电源口连接到TX2的DC口,鼠标键盘通过usb集线器连接到TX2的usb口。
2.3 上电及操作
持续按下TX2的POWER BTN 按键,两颗绿灯亮起,开机成功。
接着执行以下命令:
cd ~/NVIDIA-INSTALL
sudo ./install.sh
reboot
这步操作完成。
三、刷机
3.1 刷机准备
3.1.1 一台pc机(就是虚拟机)配置如下:
ubantu 16.04
64位
硬盘 50GB
如下:

3.1.2为了提高下载速度,需要在pc机下更新国内的软件镜像源(如已安装请忽略)。步骤如下:
命令修改source.list:
sudo gedit /etc/apt/sources.list
先把文件进行备份,然后清空内容,在文件中加入以下:
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
修改完以后,执行更新:
sudo apt-get update
sudo apt-get upgrade
这一步完成。
3.2 开始刷机
3.2.1 在pc机上安装JetPack
下载地址为(需要一个nvidia的账户):https://developer.nvidia.com/embedded/jetpack
我这里下载的是JetPack-L4T-3.3-linux-x64_b39.run
下载好以后,在pc机根目录下创建jetpack路径用来存放jetpack包,然后在当前目录解压。
执行完以后,进入解压目录下:
更改权限:
chmod +x ./JetPack-L4T-3.3-linux-x64_b39.run
安装:
sudo ./JetPack-L4T-3.3-linux-x64_b39.run
如下:

中途异常,直接点ok进入下面这个界面

next:

next,选择TX2

接下来的这步,我选择的是Full全部安装。这样避免了后边需要用到某些东西而没有安装,又要去安装这些东西。

next,选择接受所有。

下面这步,建议选择第一种方式,就是将TX2 和 pc机的物理主机通过网线连在同一局域网下。之前试过无线连接局域网,好像不太行。

到这步的话直接next

一步步操作下来之后,会弹出一个窗口

3.2.2 TX2连接到pc,开始刷机:
1、断开电源,保证开发板处于断电关机状态
2、用网线连到路由器上,插上鼠标键盘
3、用Micro USB线把开发板连到电脑上
4、接通电源,按下power键,开机
5、刚一开机,就长按Recovery键不松开,然后点按一下Reset键(Down and Up),过2s以后才松开Recovery键,此时开发板处于强制恢复模式。
完成上述步骤后,接下来:
6、检查开发板有没有和电脑正确连接,按ctrl + Alt + T 另打开一个终端输入lsusb 命令,可以看到一些列表,只要发现其中有Nvidia Corp就说明连接正确。

在接下来的操作前,强烈建议在TX2上也安装一下国内的软件源,不然下一步会需要进行很长时间。有关软件源的安装可以参考本文前述在PC机上安装方法。或者需要别的软件源可自行上网查找。但是注意和ubantu的版本号一定要对应。
7、最后,确认成功连接之后,在Post installation窗口,按下回车,进行安装。
如果不出意外,基本上等半个小时四十分钟就完成了。完成后安装窗口中会显示:Installation of target components finished, close this window to continue.
好了,刷机成功!!!
3.2.3 测试环节
刷完机后,可以跑几个自带的程序测试一下是否安装成功。
海面模拟测试
如下:
cd /home/nvidia/NVIDIA_CUDA-9.0_Samples/bin/aarch64/linux/release/
./oceanFFT
车辆识别测试
如下:
cd home/nvidia/tegra_multimedia_api/samples/backend
./backend 1 ../../data/Video/sample_outdoor_car_1080p_10fps.h264 H264 --trt-deployfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.prototxt --trt-modelfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.caffemodel --trt-forcefp32 0 --trt-proc-interval 1 -fps 10
结果如下:

测试完成!
四、采坑记录

会一直卡在这个地方不动。
主要原因:虚拟机的网络适配器模式选择了NAT模式共享主机IP地址,一定要改为桥接模式,复制物理网络连接模式
点击虚拟机–>设置,将网络适配器中的网络连接改为桥接模式,并勾选复制物理网络连接状态。
但是我改完桥接模式之后连不了网,要是不嫌麻烦,可以去设置一下桥接模式下联网。
我的解决办法:
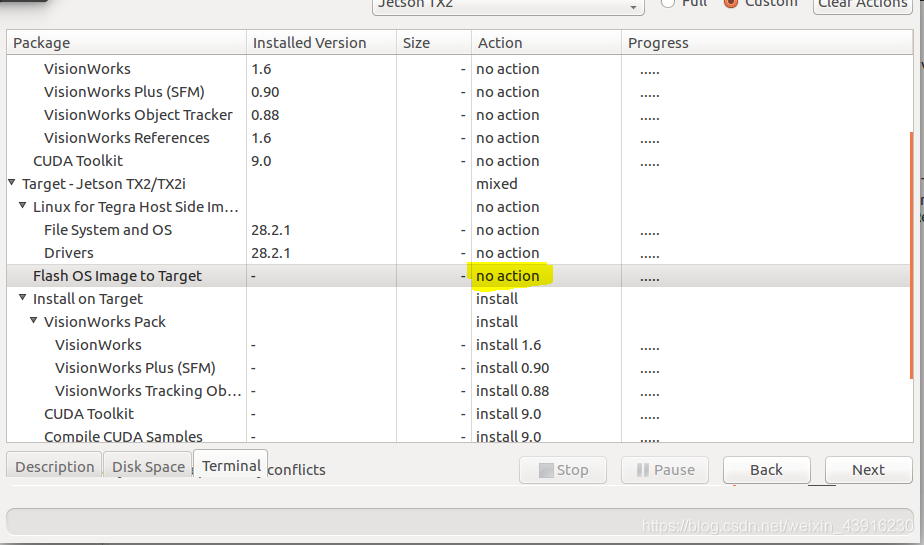
既然 Flashing OS 安装完毕,我就直接关闭这个页面,重新执行 ./JetPack-L4T-3.3-linux-x64_b39.run,前面的操作都一样,在这一步,把这里改成 no action,然后进行余下的操作,就可以顺利完成了。
主要就是这个坑。
最后,就可以使用TX2去做一些事情啦!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)