惯性导航理论依据: 牛顿第一定律(在不受外力作用下,物体将保持静止或匀速直线运动) 牛顿第二定律(物体加速度的大小跟作用力成正比,跟物体的质量成反比;加速度的方向跟作用力的方向相同)
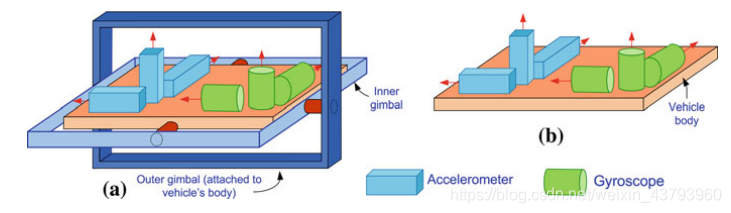
平台式惯导:(下图a所示)惯性传感器安装在一组框架上(平衡环),通过扭矩电机根据陀螺仪感应的旋转来实现平台的旋转,使得平台始终与导航系保持一致。因此,加速度计的输出可以直接在导航系的速度与位置上进行积分。由于平台式惯导系统在机械构造上非常复杂并且价格昂贵,所以应用十分有限。
捷连式惯导:(图b所示)惯性传感器被刚性安装在移动平台的载体上,平衡环由计算机算法代替,通过坐标系变换算法来模拟平台的旋转。利用陀螺仪测量角速率来不断更新载体系和导航系之间的相对姿态。然后,加速度计的测量值通过旋转矩阵到导航系中,计算加速度。 由于捷连式惯导具备:可靠性、灵活性、低功耗、轻量、价低等优点,目前获得广泛用。
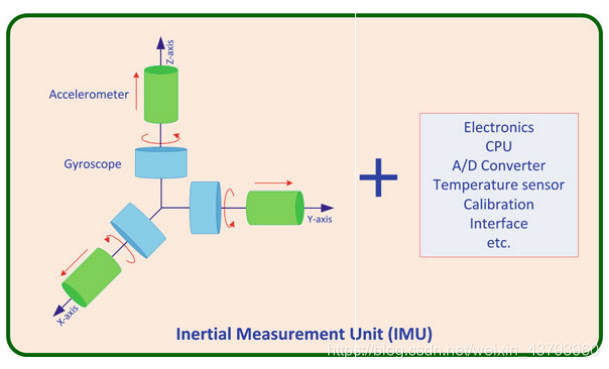
INS主要由三个主要模块组成:惯性测量单元、预处理单元、机械化模块。 IMU使用3个相互正交的加速度计和陀螺仪:
当三轴加速度计静置于水平面平行时,此时加速度计测量的是地球重力加速度(其中包含一些误差与噪声),重力矢量垂直向下,与载体系的z轴重合,因此三轴的比力分别为:
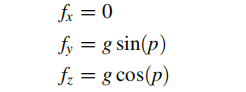
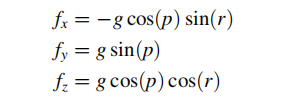
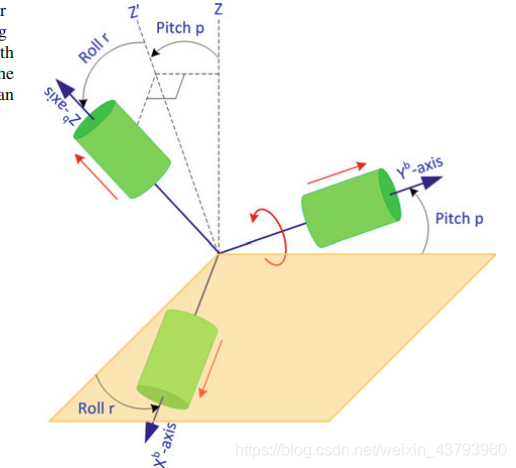
若三轴加速度计的放置不与水平面平行,而是绕着x轴旋转,与地面形成一个角度p,如图所示: 此时z轴从原来的位置(虚线z)倾斜到一个新的位置z’。角度p被称为俯仰角。此时的yb、zb轴均可感知到重力矢量的分量,各轴比力为: 若再将传感器绕其y轴旋转,使其x轴与z轴偏移一个角度r,此时所有轴上都能测量到重力矢量分量:
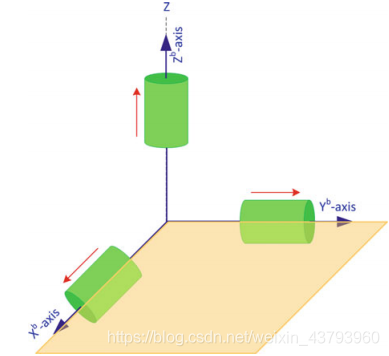
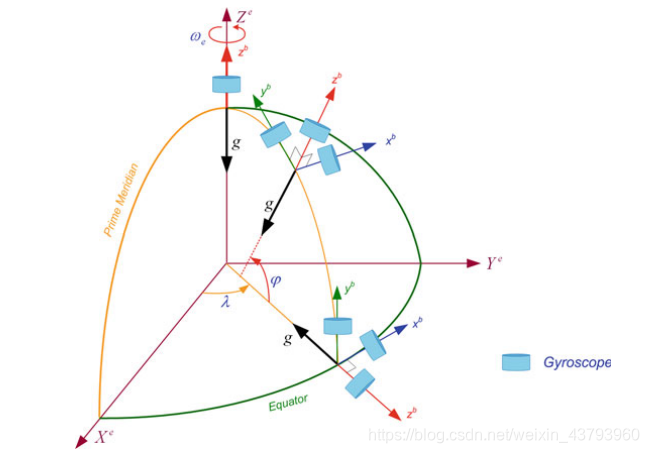
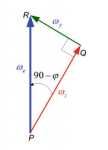
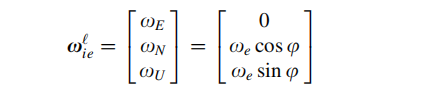
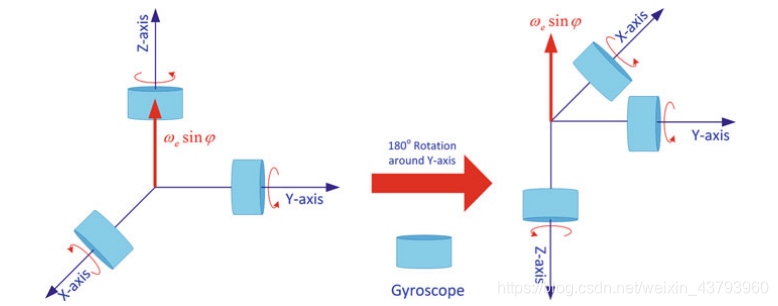
假定当前载体系与ENU系(东北天)重合,三轴陀螺仪可以测量由于地球自转而产生的静止分量,也可以测量由于车辆行驶时经纬度的变化率而产生的非静止分量。 在静止条件下,陀螺在地球表面可以感知到地球的自转角速度We;此时陀螺仪各轴上的测量值取决于载体所在的纬度。由上图可知,Wx始终为0,当陀螺仪位于北极N时,Wz=We;当器件位于赤道时,Wy=We,当器件位于中间纬度 fai 时,满足以下公式: 所以,陀螺仪的静止分量可表示为:
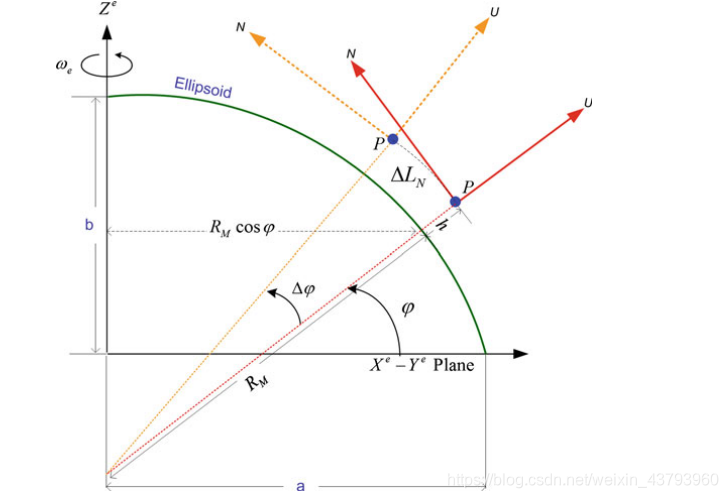
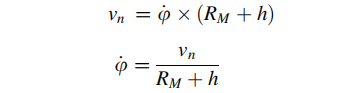
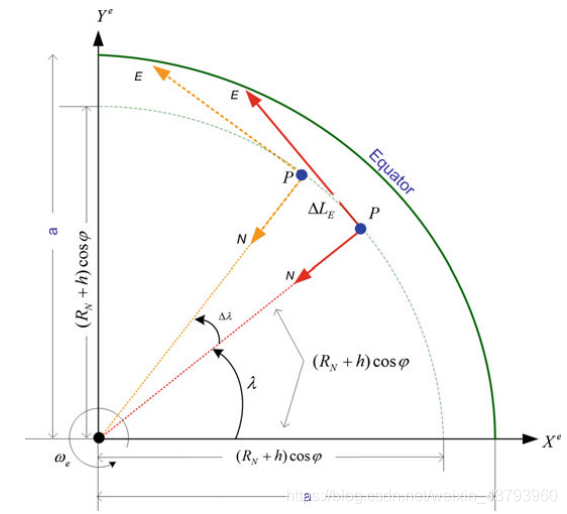
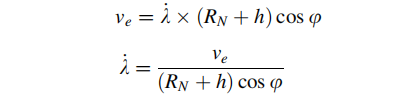
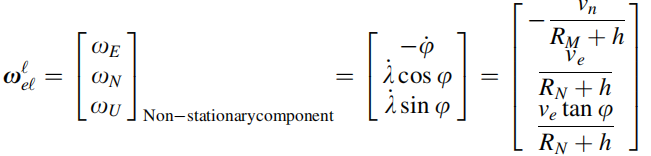
在运动条件下,陀螺仪测量到的是载体各轴上的旋转角速度与地球自转角速度在各轴上的分量,以local-frame作为导航坐标系,假定物体向东北方向移动,则x轴(东向)上的角速度相当于移动物体在纬度上的移动速率: 同理,东向的速度可表现为经度的变化率,继而可以表示为与地球自转轴重合的角速度(由于运动造成的),该角速度可被y与z轴的陀螺仪感知: 所以,陀螺仪的非静止分量可表示为:
惯性传感器误差可分为两大类:系统误差与随机误差。
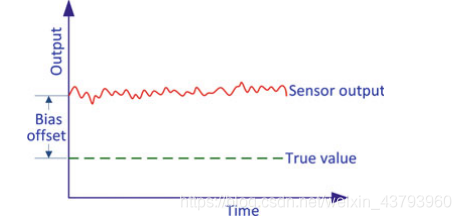
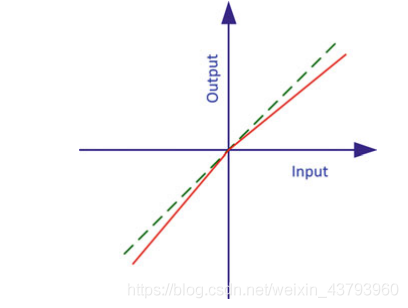
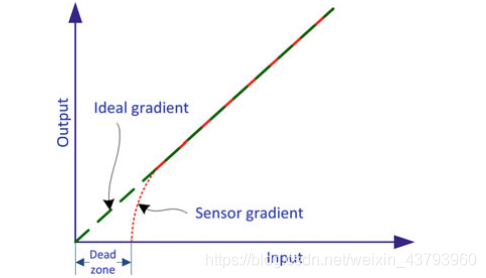
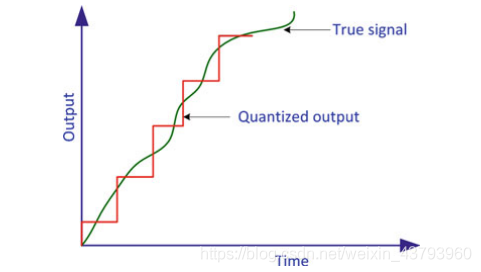
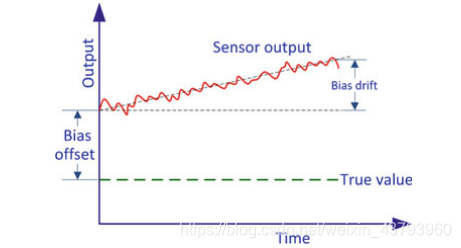
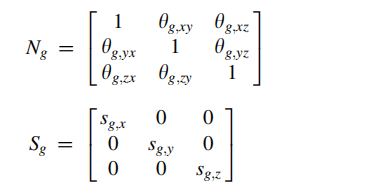
(1)系统偏置: 当无输入时,传感器自身存在的偏移量。 (2)尺度因子误差: 传感器应输出的实际值与输出值之间的比例关系。 尺度因子误差引起的加速度计输出误差与敏感轴上的真实比力成正比,同样陀螺输出误差与敏感轴的真实角速度成比例。 (3)非线性误差: 输入与输出之间的非线性关系。 (4)尺度因子符号不对称: 正、负输入的尺度因子不同。 (5)死区: 有输入的情况下,输出为0的范围 (6)量化误差: 将连续信号转化为离散信号是产生的误差。
惯性传感器受到各种随机误差的影响,通常采用随机建模的方法来减轻这些误差的影响
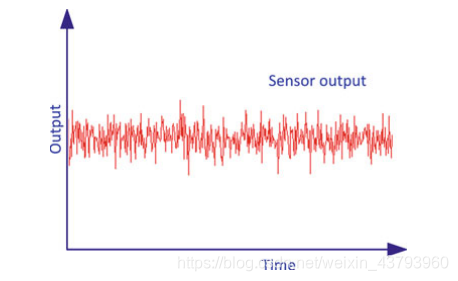
(1)偏置漂移(Bias Drift): 运行过程传感器偏置中随时间随机变化。称为偏差漂移。初始偏置是确定性的,而偏置漂移是随机的。偏置漂移的一个原因是温度的变化。 (2)高斯白噪声: 零均值的高斯白噪声
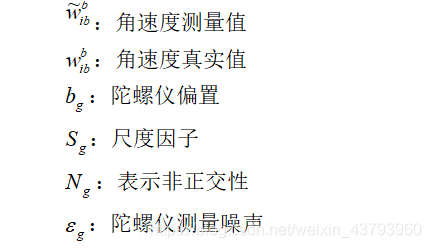
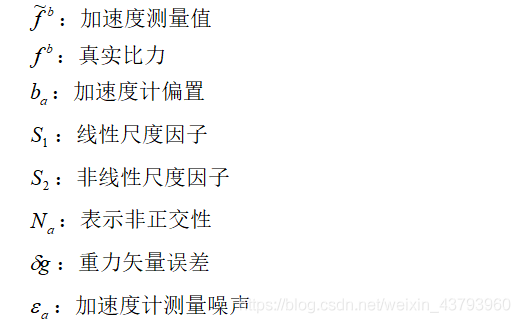
(1)陀螺仪测量模型: 角速度的观测方程: (2)加速度计测量模型: 加速度的观测方程: 4.4 惯性传感器误差的校正
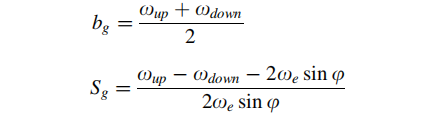
加速度计误差校正: 陀螺仪误差校正: 纬度为fai的载体系,若可感知到地球自转,则: 载体系中,指向天向的敏感轴,可以感知到地球自转的分量,并可以以此来计算校正参数: 对三个陀螺仪中的每个轴重复这个过程,以获得它各轴的偏差和比例因子。 低成本的陀螺仪无法探测到地球的自转速度,可以以恒定速率表60 °/ s旋转(或任何其他速率高于陀螺仪的检测阈值的转速),替换方程中的 We sin(fai).
传感器的加速度和转速进行一次积分,计算出速度和姿态,再对速度进行积分得到位置。导航方程需要获得位置、速度和姿态的初始值。这个过程叫做位置和速度的初始化以及姿态的校准。 *位置和速度初始化: 位置可以使用车辆开始移动前的最后一个已知位置进行初始化。对于INS与其他(通常是GPS)集成的系统,外部导航系统可以提供一个初始位置作为先验。 如果载体是静止的,那么速度可以初始化为零。如果载体是移动的,那么初始速度可以通过外部导航提供。
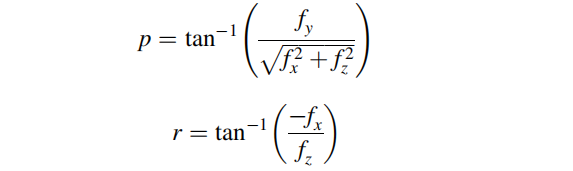
*姿态对齐: 两个步骤:首先,通过初始化俯仰(p)和横摇(r)角将载体系与"东北"对齐,再将航向角(y)与天向对齐。 当车辆静止时,加速度计的俯仰轴与滚转轴由于与地平面存在倾斜,因此可感知到重力矢量的分量。 在载体系静止的情况下,通过加速度测量的比力,可以计算出初始姿态角中的pitch和roll: 其过程如下: 已知local-frame下的重力矢量为: 停止情况下加速度计测得的比力,可表示为“东北天”系下的重力矢量左乘旋转矩阵,即:从地理系变换到载体系下的结果: 假定载体的俯仰(x:pitch)、横滚(y: roll)、航向(z: yaw)三轴上的姿态角分别为:p、r、y;旋转矩阵可以由下式表示: 将旋转矩阵代入得到: 由上式可知,通过静止时的加速度测量值感知重力矢量分量,可以得到与俯仰角(p)与横滚角(r)相关的方程,因此可以求出相应的姿态角: 而航向角(y)是无法通过坐标轴与水平面对齐的方法得到(因为改变航向角,重力矢量始终指向下不发生变化),要想求出航向角,还需要借助陀螺仪的测量。 若陀螺仪可以感知到地球自转,则: 在初始对准过程中,由于保持静止,后一项为0: 其中: 地球自转角速度We约为:15.04deg/h 代入以上式子,则载体系相对于惯性系的旋转角速度为: 因为p和r在上一步骤中已经通过加速度测量值求出,因次在该式中,可以将Wx乘以cos( r),Wz乘以sin( r),得到: 因此: 求出航向角为:
相对于地平面,俯仰角与横滚角其实很小,可做以下近似: 则航向角可简化为: 注意: 需要注意的是,使用陀螺仪感知地球自转来求航向角的方法只对较高精度的IMU可行,对于低精度的IMU,其噪声阈值超过了地球自转信号,因此无法探测到地球的自转。对于这些低精度的IMU,航向角的估计需要通过罗盘、磁力计、或者GPS获得。