组合导航(一):导航定位技术分类与介绍
- 一. 定位技术分类
- 1.1 基于相对测量的定位(航位推算)
- 1.2 基于绝对测量的定位
- 1.3 组合定位
一. 定位技术分类
1.1 基于相对测量的定位(航位推算)
(1)轮式里程计
通过编码器获得轮式里程计的测量数据,车轮的转动被转换成线性位移。对于指定初始位置的运动估计,通过积分得运动增量,从而得到当前的位置信息。
· 该方法具有精度短、成本低、采样率高的优点
· 但车轮会产生打滑,定位误差会随着移动距离增加,影响长期精度
(2)惯性导航
惯性导航系统是自主的,不需要获取外界信息。
惯性传感器(陀螺仪与加速度计)测量角速度与加速度。陀螺仪积分可获得旋转,加速度的一次积分与二次积分分别获得速度与位置。
但积分势必会造成误差的累积。因此低精度的imu,无法单独用于精确定位。
1.2 基于绝对测量的定位
(1) 全球卫星导航系统(GNSS)
GNSS是一种用于室外的导航技术。典型的如:GPS、北斗(中国)、伽利略(欧盟)、GLONASS(俄罗斯)··
通过三边测量,地面接收机可以利用卫星信号的运行时间和当前位置信息来计算其位置,这些信息包含在发射信号中。当接收机与若干卫星的确切距离已知时,就可以计算出接收机的纬度、经度和高度,其中3个是理论上的最小距离,4个可以校正接收机的时钟偏差。只要有足够的卫星覆盖,GPS可为户外导航提供了良好的绝对定位。
(2) 地标导航(Landmark Navigation)
地标导航地标技术用于已知环境下的导航。landmark可以是自然界特定的目标物,也可以是人工地标,可以被检测识别到。因此地标导航需要具备一个保存特征与精确地理位置的数据库。
人工地标是为定位和导航而添加到环境中的物体,而自然地标已经存在于环境中。每个地标必须有一个固定的位置。车辆需要一个关于它们特征和位置的数据库。一些地标可能包括额外的信息,如条形码。车辆必须能够从其传感器输入可靠地识别地标,并以确定其自身位置的方式处理数据。
(3) 基于地图的定位(模板匹配)
当移动设备在某个具有特定地图的环境中运动时,可以使用地图模板匹配。
使用传感器来感知本地环境,然后将感知结果与预存地图进行比较;若匹配成功,则可获得移动设备在具体环境中的位置与方向。通常使用相机与雷达作为该定位技术的传感器。
模板地图需要提前采集,用于室外环境时,通常会与GPS一起使用,以确定设备的路面所在位置。
1.3 组合定位
使用两种及两种以上的定位方法,以获得更可靠的定位信息。
~GPS:
全球定位系统由24颗环绕地球的卫星组成,其平均半径为26.560公里。原则上,GPS接收器只需要三颗卫星的距离,就可以利用三边测量原理计算出它的三维位置。但是需要第四颗卫星来从系统时钟中估计接收机时钟的偏移量。GPS可能会由于信号阻塞、多径效应、干扰而出现中断。例如:城市、峡谷、隧道以及其他市内环境。
为提供更精确的实时定位信息,GPS需要与其他具有互补特性的系统集成,以满足GPS拒止情况下的导航定位。
- GPS增强系统( 其他GNSS定位系统、空间增强系统、地面增强系统)
- 本地无线定位系统(蜂窝基站、Wi-Fi、电视塔)
- 运动传感器,如惯性传感器,里程表和指南针
- 辅助传感器,如相机、光探测和测距(激光雷达)
- 数字地图
INS与GPS性能
| 特性 | INS | GPS |
|---|
| 导航精度 | 短期精度高,随时间漂移 | 长期导航精度高,存在噪声干扰 |
| 惯性坐标系 | 使用 | 不使用 |
| 姿态信息 | 有 | 没有 |
| 感知重力方向 | 是 | 否 |
| 输出频率 | 高频 | 低频 |
| 自主 | 是 | 否 |
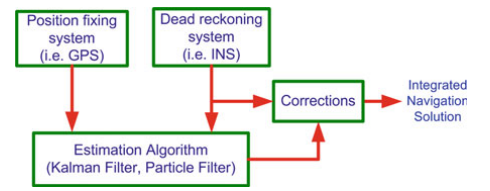
图1.典型的(INS/GPS)组合导航系统结构图
1.可获得更高精度的位置与速度
2.可以得到姿态信息
3.较高的数据输出频率
4.解决GPS信号阻塞时的导航问题
GPS与INS融合算法,主要有卡尔曼滤波(KF)、粒子滤波(PF)等。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)