一、Velodyne16线激光雷达基本描述
VLP-16激光雷达是Velodyne公司出品的最小型的3维激光雷达,保留了电机转速可调节的功能。实时上传周围距离和反射率的测量值。VLP-16具有100米的远量程测量距离。精巧的外观设计使得安装非常方便。重量轻,只有830g,非常适合安装在小型无人机和小型移动机器人上。 每秒高达30万个点数据输出。±15°的垂直视场,360°水平视场扫描。
参数:
激光线数:16线
测量范围:高达100m
测量精度:±3cm
支持两次回波
垂直测量角度范围:30°(﹢15°到﹣15°)
垂直方向角度分辨率:2°
水平方向测量角度范围:360°
水平方向角度分辨率:0.1°到0.4°
测量频率:5到20Hz
可以通过网络浏览器监测和改变电机的转速
激光安全等级:1级(人眼安全)
激光波长:905nm
传感器功率:8W(典型值)
工作电压:9-32V
重量:约830g
外形尺寸:103mmX72mm
振动测试:500m/sec2 振幅,持续时间11msec
振动:5 Hz to 2000 Hz, 3G rms
防护等级:IP67
工作温度:﹣10℃到﹢60℃
储存温度:-40℃到﹢105℃
输出:每秒高达30万个测量点输出
100M快速以太网连接
数据包包含:距离值、物体反射率、旋转角度、同步时间支持外接GPS
二、下载与测试
测试系统:ubuntu18.04 (双系统)
1. 提前配置好本机的有线ip地址
(1)连接雷达有线网络
(2)进入有线设置(点击ubuntu右上角有线网络,进入设置)
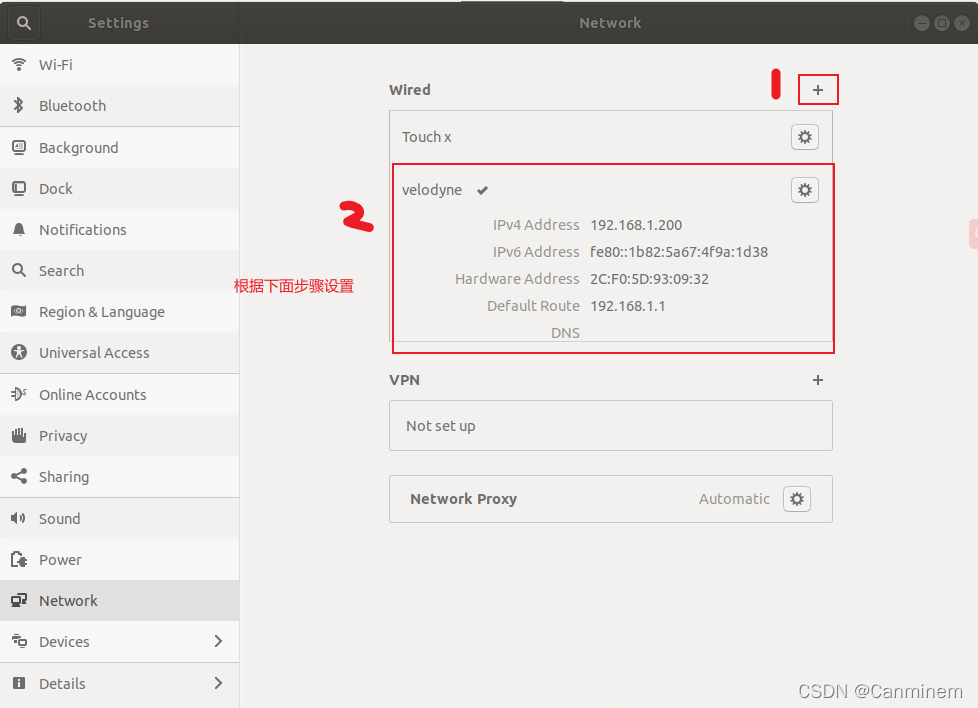
点击上图“1“位置的”+“后,按照下图设置:

点击”IPv4“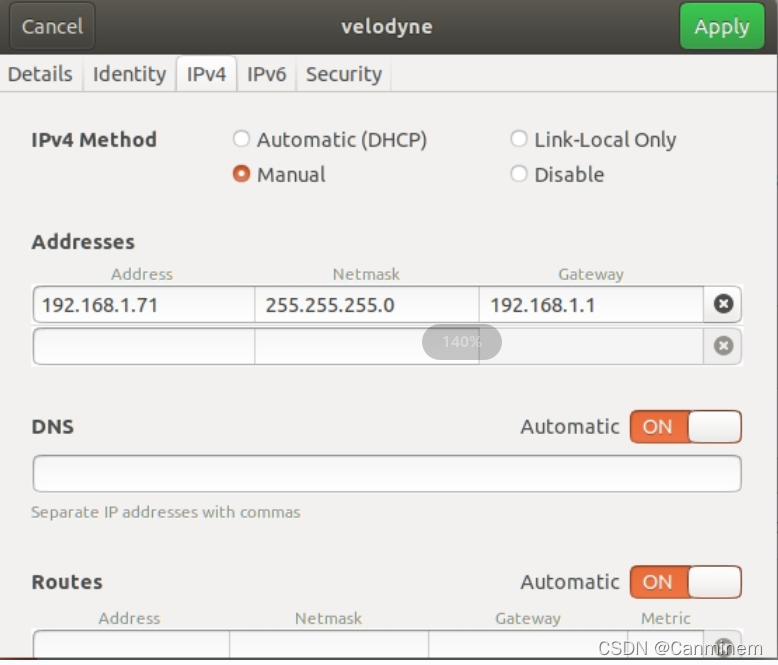
在IPV4中设置:
Addresses:
(Address:192.168.1.77;Netmask:255.255.255.0;Gateway:192.168.1.1)
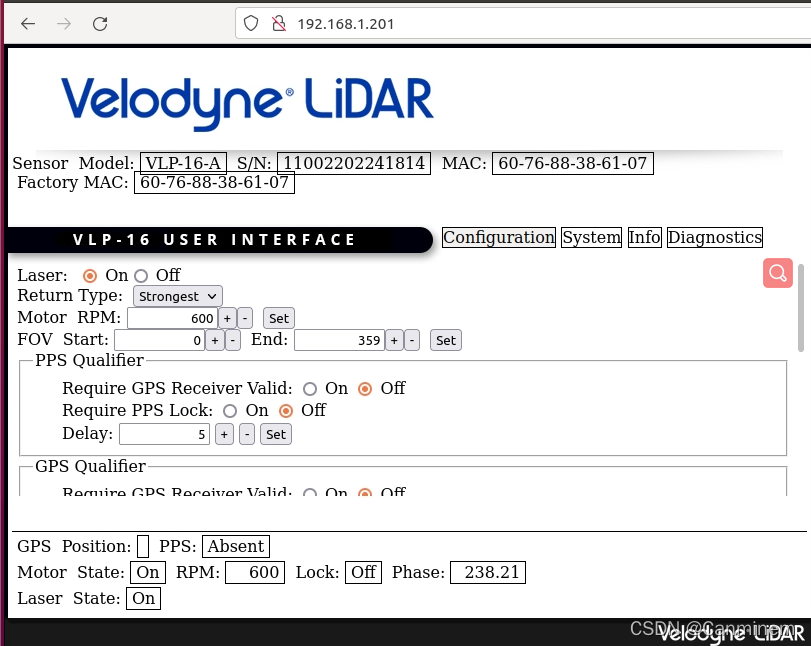
进入网页查看设置:
网址处输入192.168.1.201,即可看到雷达配置。
2.安装Ros依赖
sudo apt-get install ros-melodic-velodyne
3.创建Ros工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
catkin_make
source devel/setup.bash
成功编译后准备启动
4.连接好设备
激光雷达正常供电,然后电脑和雷达之间通过网线连接。
打开终端,运行命令:
roslaunch velodyne_pointcloud VLP16_points.launch
打开新的终端,可以查看节点运行情况:
rosnode list
也可以订阅points主题,会显示很多点的坐标:
rostopic echo /velodyne_pionts
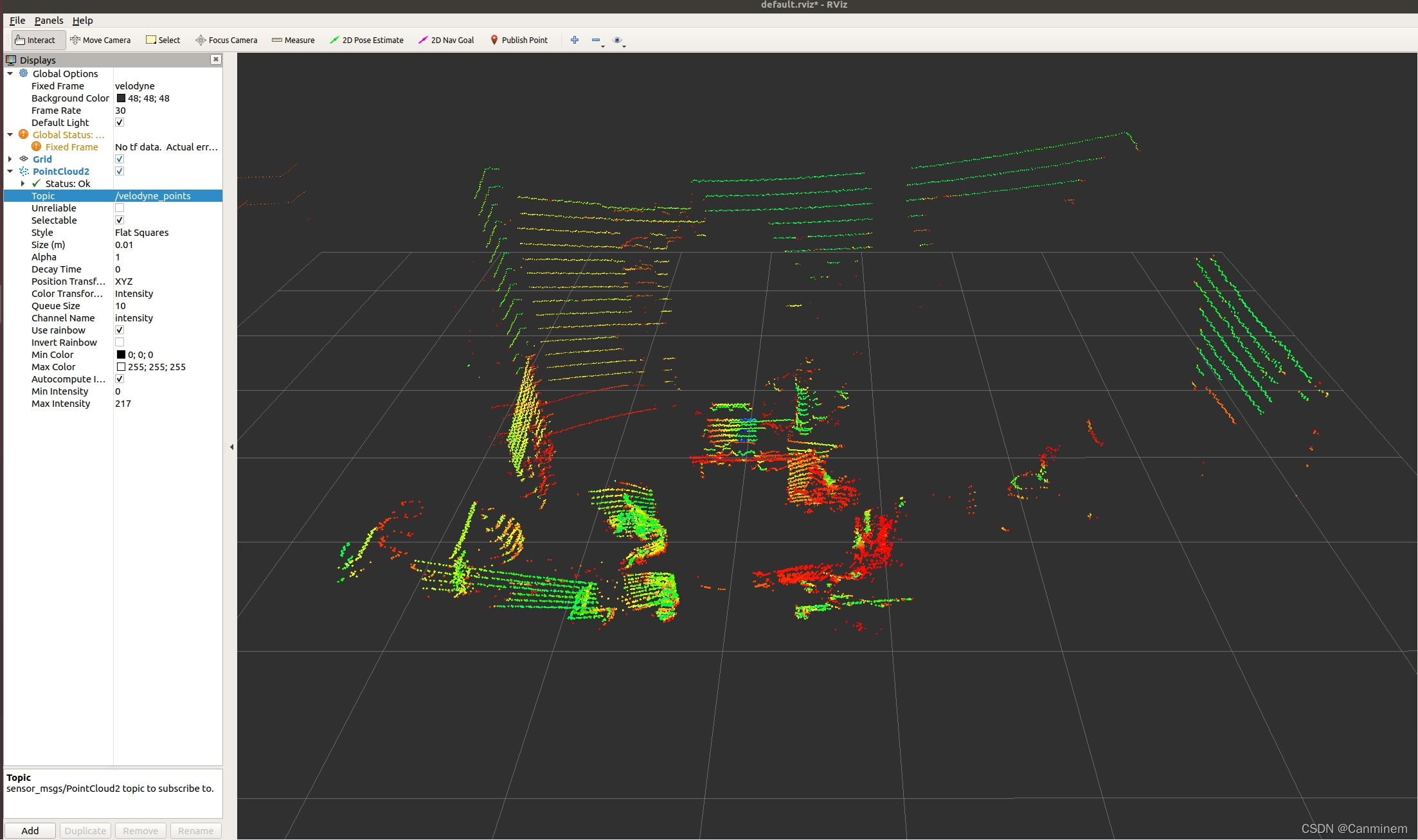
结束上面的坐标点的查看,然后打开rivz,查看3D数据:
rosrun rviz rviz -f velodyne
会显示一个可以旋转的界面出来,但是并没有数据。需要你添加点进去
首先点击Add,添加pointsCloud2
5. 记录数据
rosbag record -0 out /velodyne_points
只保存/velodyne_points这个topic的数据(可以用rostopic list -v开看当前可用的topic),保存在当前目录的out.bag。
注意下面是大写的O(字母)
rosbag record -O my_laser.bag /velodyne_points
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)