元学习论文总结||小样本学习论文总结
2017-2019年计算机视觉顶会文章收录 AAAI2017-2019 CVPR2017-2019 ECCV2018 ICCV2017-2019 ICLR2017-2019 NIPS2017-2019
1.使用vnc4server无法启动rviz,改用x11vnc,下面是安装办法
# 安装
sudo apt-get install x11vnc -y
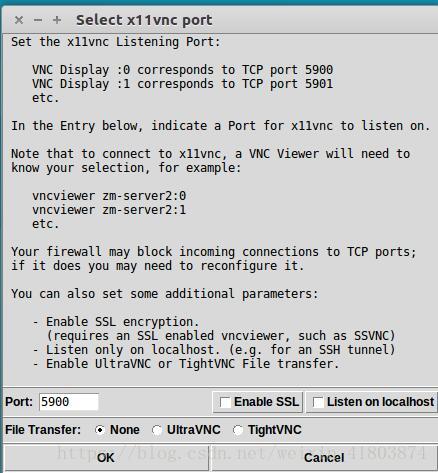
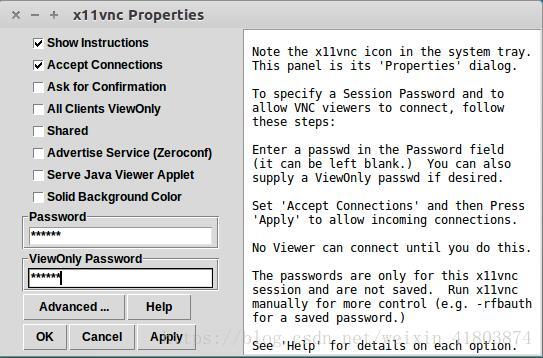
2.启动server办法:ubuntu软件搜索>x11vnc>启动>设置端口>设置密码>用vncviewer登陆

3.登陆后效果展示
4.自动开机启动办法
https://blog.csdn.net/jnbbwyth/article/details/38390167
5.vnc4server安装办法https://blog.csdn.net/weixin_41803874/article/details/81042115
# 打赏鼓励请扫支付宝微信二维码O(∩_∩)O金额不限噢噢!如果有修改建议或者疑问请留言!
 支付宝
支付宝
 微信支付
微信支付
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)