转载自:https://blog.csdn.net/MocapLeader/article/details/106275584
NOKOV Seeker2.2动作捕捉软件与ROS的通信
MocapLeader 2020-05-22 11:52:15 347 收藏 1
文章标签: 定位 数据库 软件框架 网络通信
版权
一、动捕软件安装与数据准备
1.在操作系统为Windows系统,且位数为64位的电脑上,以鼠标右键点击“以管理员身份运行”的方式,运行“Seeker2.2_Tracker_setup.exe”文件(如图1);
直接点击安装即可,注意请勿更改安装路径(如图2);
2.安装完毕后,桌面上会出现软件图标(如图3);
3.在电脑上插入白色的软件加密狗。
4.鼠标右键桌面上的“Seeker”图标,选择“以管理员身份运行”,打开软件;
5.使用Seeker采集动作捕捉数据,经处理使其能带着Markerset加载播放,或者能在实时下显示Markerset运行(如图4)。 图4
图4
二、数据广播
1.点击Seeker界面右上角点击 软件界面右上角齿轮按钮在“Network”标签下的 “Mode”选择“Multicast”,并勾选“SDK Enabled”选项(如图5)
 图5
图5
2.关闭该设置窗口,在后处理或实时下播放数据;
三、VRPN设置
1.在Seeker软件所在电脑中启动NokovVrpnServer.exe(进入目录后双击即可),软件会自动检查并连接Seeker软件(如图6);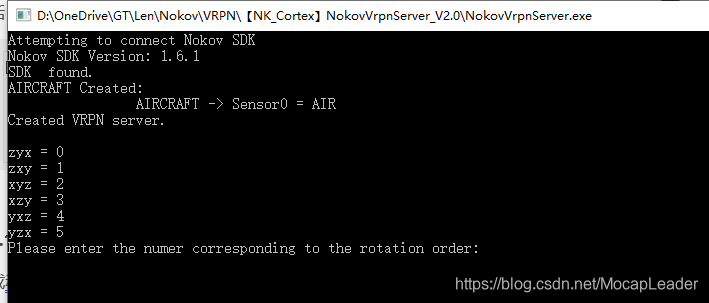
2.在VRPN界面,选择和Seeker软件中刚体数据一样的坐标系(如图7);
3.点击回车,Seeker软件的VRPN服务器即启动(如图8)。 图8
图8
四、ROS下与Seeker2.2软件的通信测试
.运行环境:
ROS:kinetic
Ubuntu:虚拟机16.04
2.运行目的:
通过Seeker软件和VRPN获取markerset或者刚体等的信息,并传给ROS。
3.VRPN客户端的下载及网络配置,使用虚拟机运行(如图9-11)
cd ~/catkin_ws/src
git clone https://github.com/clearpathrobotics/vrpn_client_ros.git
sudo apt-get install ros-kinetic-vrpn 图9
图9 图10
图10
 图11
图11
4.catkin_make操作(如图12-13)
cd ~/catkin_ws
catkin_make 图12
图12
 图13
图13
5.Ping一下10.1.1.198,确认和Seeker软件所在的主机网络是否连通,虚拟机IP可设置为10.1.1.194;
6.输入以下命令:roslaunch vrpn_client_ros sample.launch server:=10.1.1.198,以启动vrpn_client_ros(如图14-15);虚拟机打印出图15中最后三行内容(其中SapphiArt字样为Markerset名称,实际使用时此处会根据Seeker软件中的Markerset名称而变化),说明连接成功;
需要注意:IP设置一定要对,防火墙一定要关; 图14
图14 图15
图15
7.重新开一个终端,输入rostopic list,可以看到话题/vrpn_client_node/***(Markerset名称)/pose(如图16); 图16
图16
8.输入rostopic echo /vrpn_client_node/***(Markerset名称)/pose,即可看到接收到的数据(如图17)。 图17
图17
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)