摘自:https://mp.weixin.qq.com/s/t0ur7p8Q-xN2qAHnjo2p4A
Pixhawk无人机扩展教程(1)---树莓派与pixhawk连接
原创 CJKK 苍穹四轴DIY 2019-12-24
在前面的教程中,我们讲解了2种用pixhawk飞控组装的无人机飞行器,分别是:F450机型和S500机型。飞行器的组装调试过程大同小异,主要目的是要学会飞控和地面站的使用。在无人机的飞行操作熟悉后,我们接下来讲解一些pixhawk飞控扩展的使用,为后期开发更多功能做准备工作。
初次接触pixhawk无人机的朋友可以点击以下链接查看以前组装调试教程:
F450组装教程:
1.https://mp.weixin.qq.com/s/24Sdne3Yw4LOaMwTHzgF-Q
2.https://mp.weixin.qq.com/s/HVwXoIr1OoOiACbRNmwsVQ
3.https://mp.weixin.qq.com/s/ylFmCggZwGy11F6bBbAdAg
S500组装教程:
-
https://mp.weixin.qq.com/s/qtBoPz3GBTKCAcTJSlziPA
-
https://mp.weixin.qq.com/s/Qzzl-dQ6Tz2pXNp7Oj0lTg
-
https://mp.weixin.qq.com/s/5Eezof-Xxt1DbYAsi5UTPw
-
https://mp.weixin.qq.com/s/SO4JVI0I_BOYkM82tcakHg
后期开发涉及的内容比较多,建议大家先自行熟悉Ubuntu16.04系统的使用,以后的操作都是在这个系统下进行的。如教程中有错误的地方,请大家留言指正,欢迎大家共同交流学习!
树莓派是一款基于ARM的微型电脑主板,以SD/MicroSD卡为内存硬盘。是一款入门级的机载电脑。树莓派可以与pixhawk飞控进行通讯,扩展外部Dronekit-python控制、SITL仿真、视觉识别、ROS、SLAM等诸多应用。对入门开发来说比较适合。
一、硬件准备:
1.pixhawk无人机一台(前面已经组装调试好的,并且测试能正常飞行),F450或则S500均可。本文是以F450为例。

2.自备树莓派2B、3B或则3B+主板一个;树莓派最好使用3B+,自带WIFI模块。因为外部控制无人机,操作电脑(笔记本)与树莓派要在同一个网段(连接到同一个路由器)。如果使用的是2B,它自身没有WIFI模块,需要接一根网线进行调试。但是可以用外置WIFI模块解决这个问题。树莓派2B价格便宜,3B+目前普遍缺货。

3.碳纤维扩展板一块及配件螺丝:

购买链接:https://shop111333.cn/9MlVPK
4.自制树莓派电源线一根:树莓派需要5V稳压电源供电,可以自己制作一根类似的电源线。

没有配件的朋友可以点击购买链接:https://shop111333.cn/9MlVPK
5.自制树莓派与PIX连接线一根:树莓派与PIX通讯需要用到TTL转USB模块。

也可点击购买链接:https://shop111333.cn/9MlVPK
二、安装过程:
1.将GPS支架安装位置调整到如图所示那样,留出扩展板安装位置(注:一定记得重新粘贴GPS模块,保证GPS箭头前向与飞控箭头前向一致!!!)。然后将长条铜柱分别固定在飞控的左右两端:

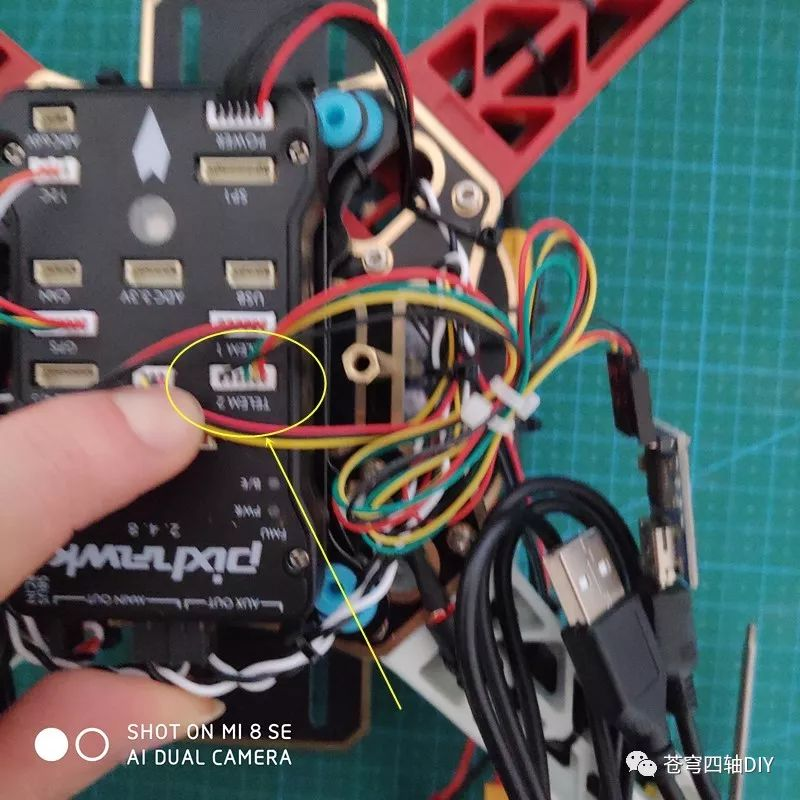
2.将连接线接到PIX飞控的telem2口(不能接到telem1)。以前有接乐迪回传模块的,将回传模块接到telem1口。如下所示:
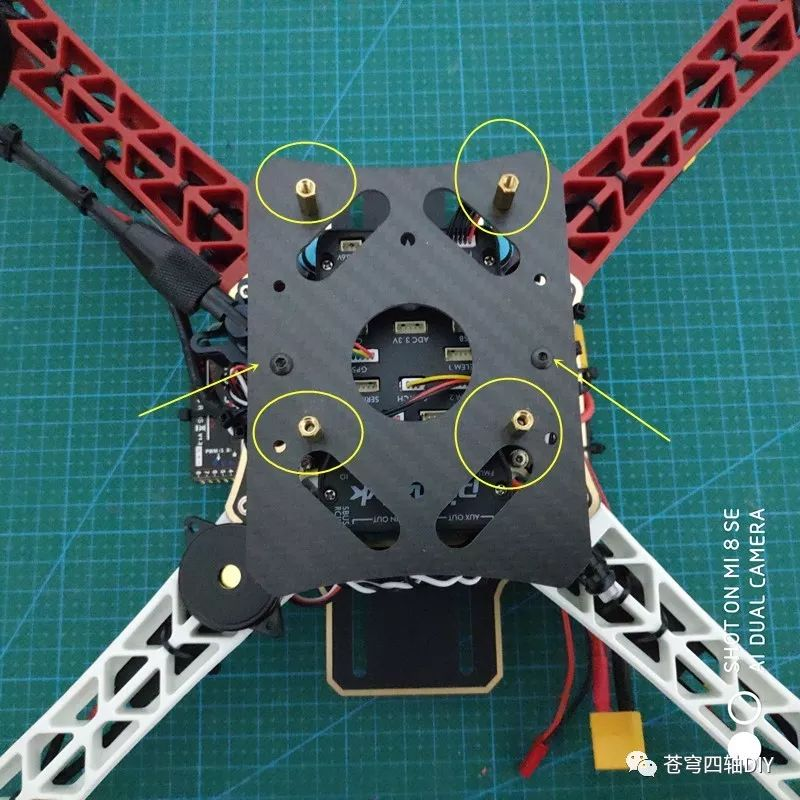
3.将碳纤维扩展板安装上4个小铜柱,注意安装孔位置,如图所示。然后再把扩展板固定在之前的铜柱上:
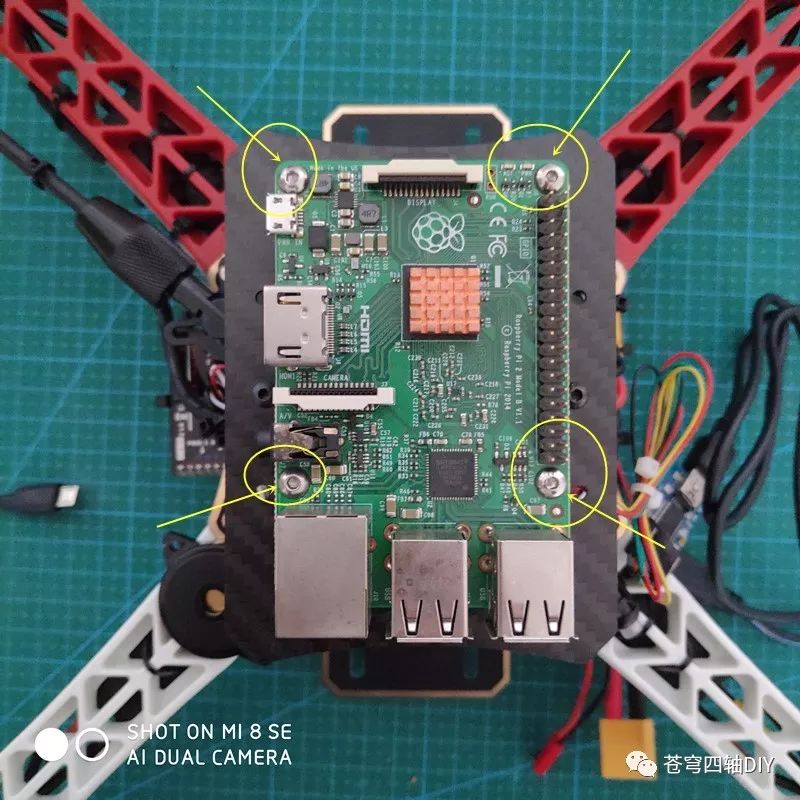
4.然后再固定树莓派。树莓派安装孔比螺丝稍小一些,可以先把树莓派的安装孔扩一下。注意不要损坏电路。
5.连接树莓派电源线,接底板预留的JST口,如下所示:
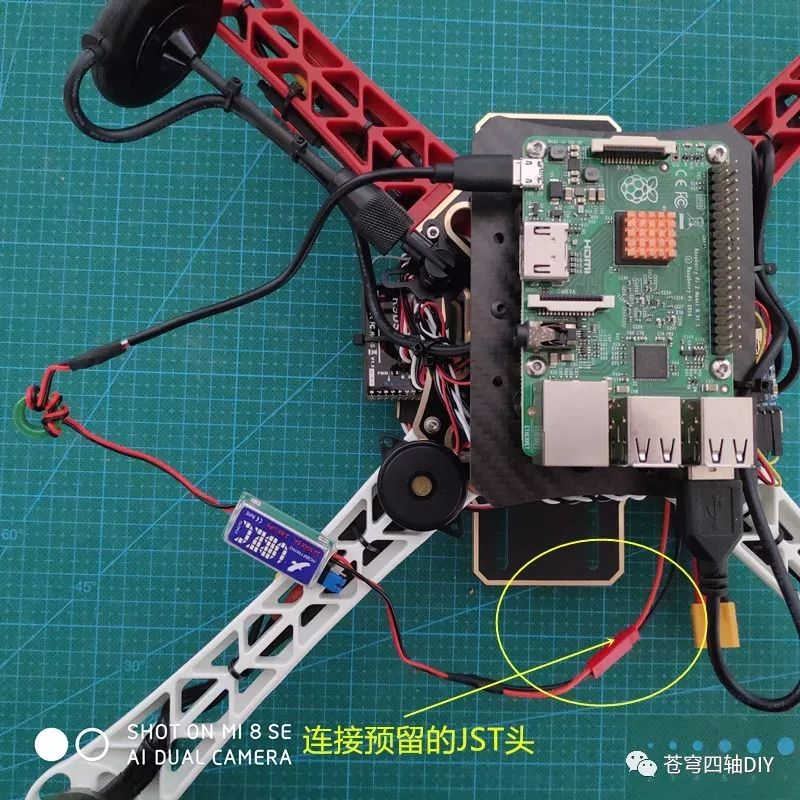
6.将TTL转USB口接到树莓派任意一个USB口都可以,绑扎整理好如下所示:
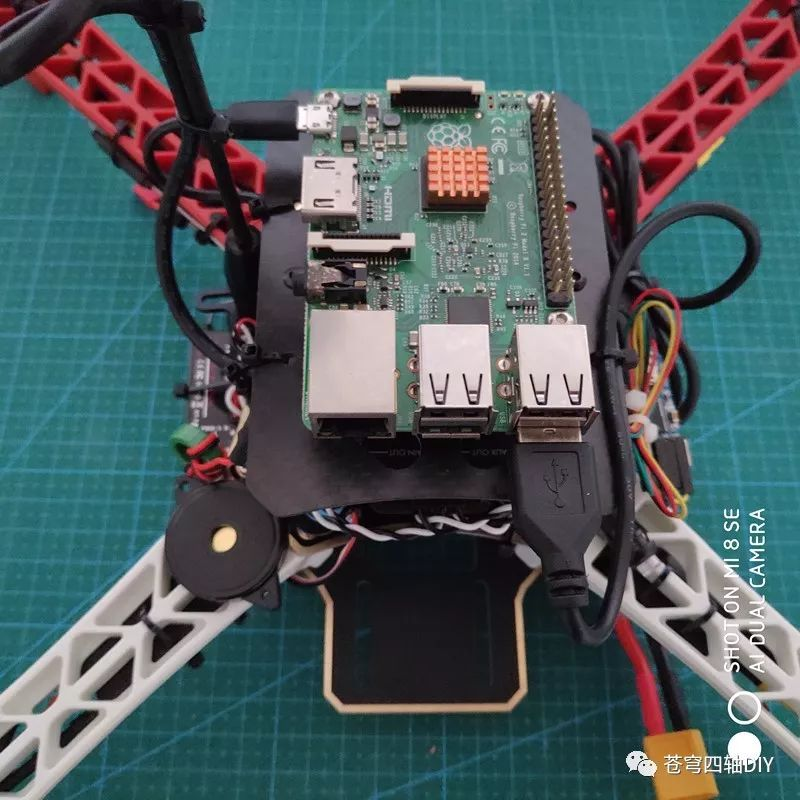
三、修改飞控接口参数:
将飞控连接missionplanner地面站,配置调试==>全部参数树,在查找中输入serial,找到如下参数:
1. SERIAL2_BAUD 设置成 921
2. SERIAL2_PROTOCOL 设置成 1
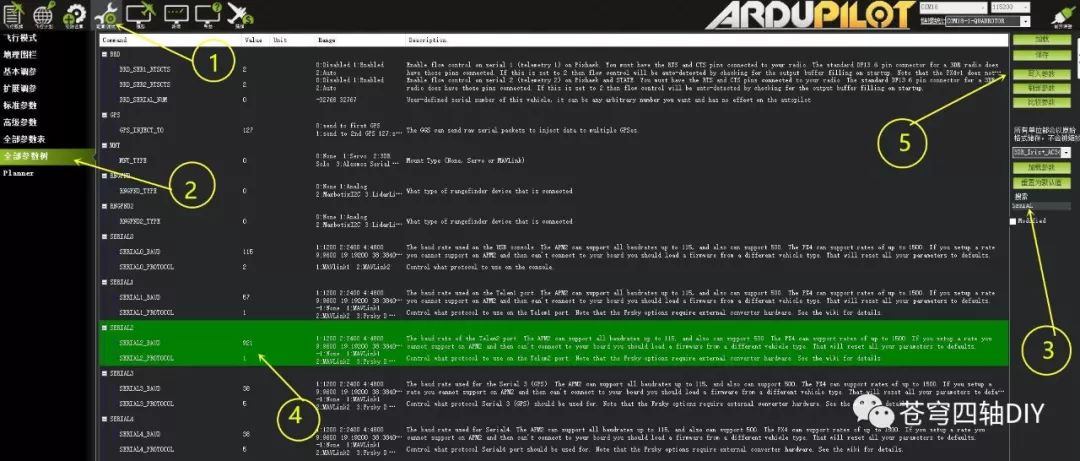
设置好以后记得点写入参数 才能保存!
做完以上3步,树莓派的安装就完成了。下次教程介绍如何给树莓派刷ubuntu-mate系统以及一些基本配置。大家还需要先在自己的笔记本上安装ubuntu16.04系统,这里就不作过多介绍了,百度有很多教程。请大家继续关注!

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)