
1. 何为相机标定?
当相机拍摄照片时,我们看到的图像通常与我们实际看到的不完全相同。这是由相机镜头引起的,而且发生的频率比我们想象的要高。
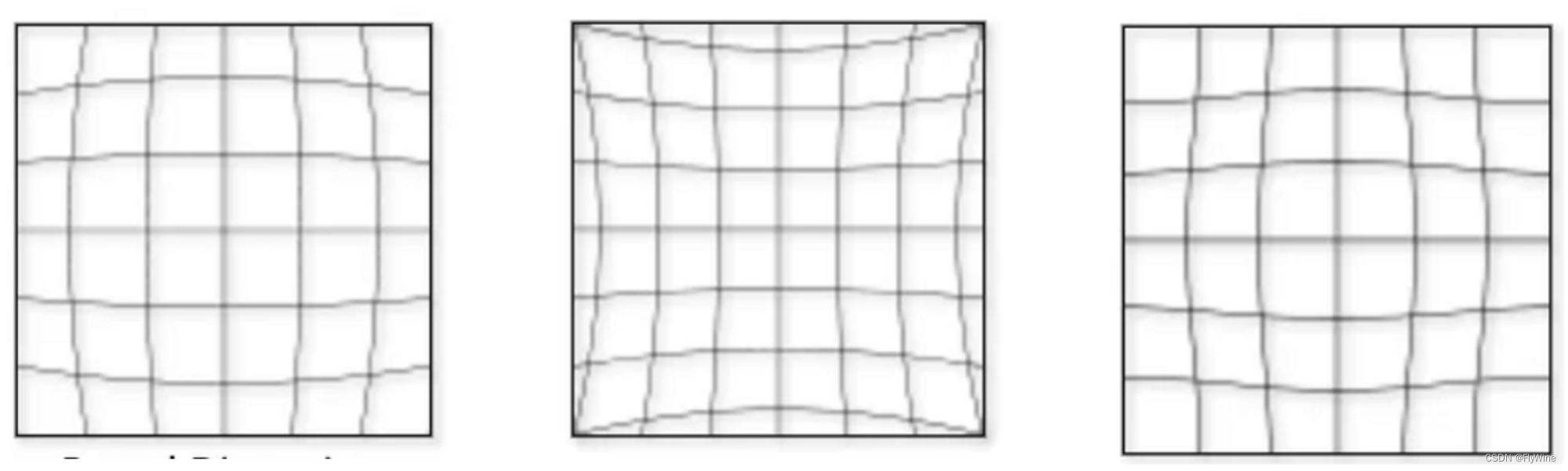
这种图像的改变就是我们所说的畸变。一般来说,畸变是指直线在图像中出现弯曲或弯曲。
这种畸变我们可以通过相机标定来进行解决。
- 内部参数,例如透镜的焦距、光学中心和径向畸变系数。
- 外部参数,这是指相机相对于某些世界坐标系的方位(旋转和平移)。
下面这张图是扭曲的和未扭曲的图像对比。

如果相机系统不进行校准,将会影响后续的计算,尤其是在三维测量中。
相机标定的意义就是:任何传感器,它都是存在有误差的,那么狭义上说,标定就是去校正这部分误差,让传感器尽量准确一点。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)