【1】What type of coordinates is used in iNav code, and why comments “x axis of accelerometer is pointing backwards”? #8483 【2】Flight controller is different from the airframe coordinate system? #11903 【3】iNav, Cullen Jennings 27 Jul 2020 · 3 revisions, Developer info 【4】Comparison of 3-D Coordinate Systems 【5】About Aerospace Coordinate Systems
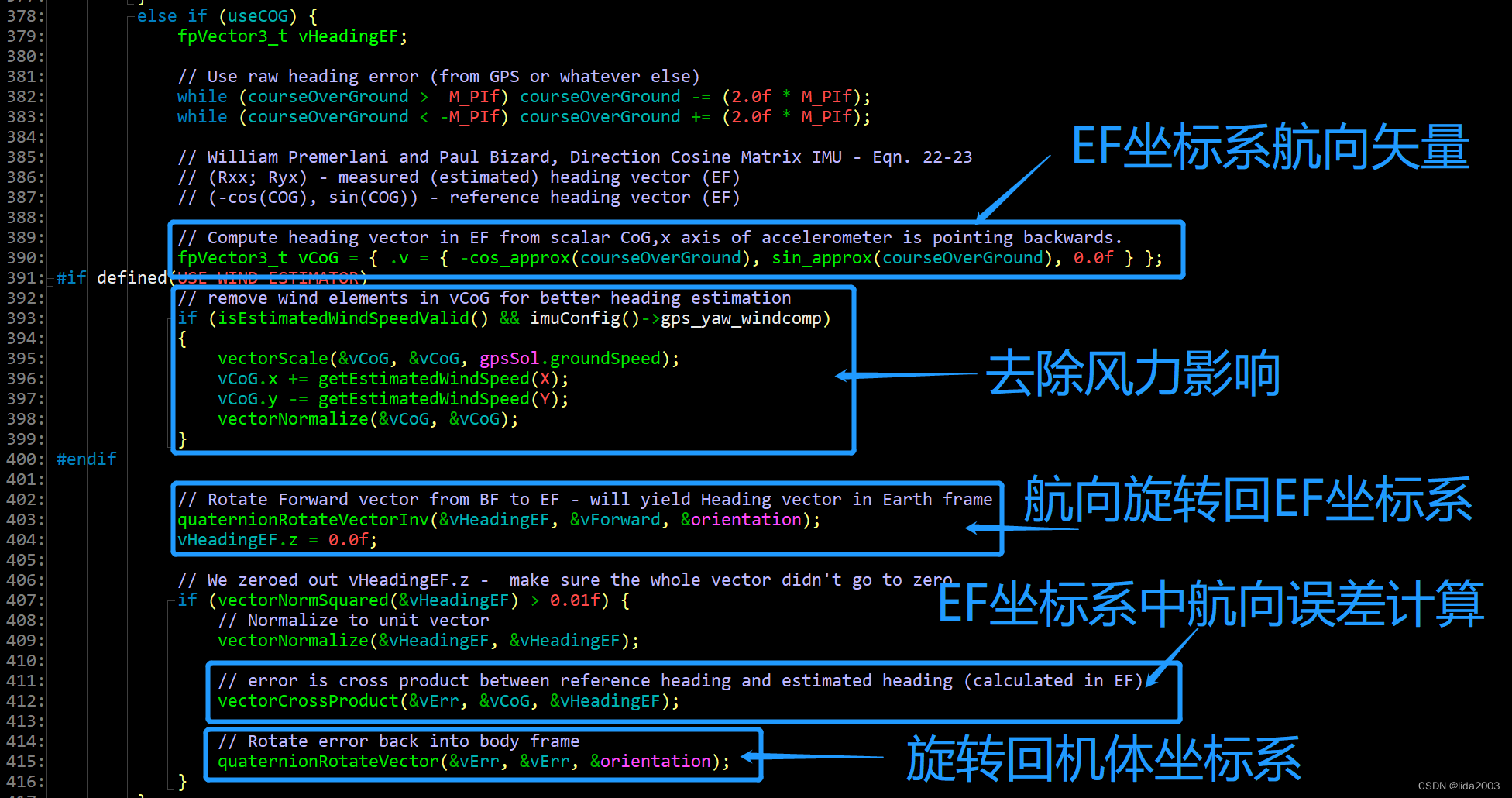
这里还是和BetaFlight深入传感设计之五:MahonyAHRS & 方向余弦矩阵理论中5.1章节中的问题一样,叉乘的结果没有问题,关键在于“Compute heading vector in EF from scalar CoG,x axis of accelerometer is pointing backwards.”,具体源由没有搞明白。