Carla简单入门-0 Carla的安装
本文写于2023年7月,文中所展示的版本为Ubuntu20.04以及Carla0.9.14,不同版本可能有一定的不同,欢迎各位伙伴们把遇到的问题和解决办法与其他人分享。
这篇文章主要面对想要上手Carla进行模拟仿真的伙伴们进行经验分享,并且为了方便快速上手,文章中将使用pre-compile的压缩包进行安装文章以Carla0.9.14版本为例,如果想要自己build from source 或者对于自定义Carla有比较高需求的伙伴们可以参考下面的链接:
史上最全Carla教程 |(二)Carla安装
英语好的伙伴们可以去参考官方文档,过程更加详细一些:
https://carla.readthedocs.io/en/latest/build_carla/
Carla同时支持WIndos和LInux系统安装使用,这里以LInux系统举例,相对于Windos而言,Linux系统在Carla和其他自动驾驶研究软件上有着更好的兼容性。
系统配置要求:
1.至少3G显存的GPU,推荐3060及以上的显卡进行Carla拟真。
2.预留足够的硬盘空间,推荐50G以上。
3.Ubuntu 14.04/16.04/18.04/20.04版本。
0. Carla下载及安装
这里有两种官方文档推荐的Carla下载方式,我在这里都列出来方便大家自行选择
a. Debian CARLA 下载
Ubuntu 18.04 以及 Ubuntu 20.04版本都可以使用Debian Carla的包进行下载, 需要注意的是 Debian 官方支持的版本是Ubuntu 18.04.
1. 在系统中设立Debian存储库
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 1AF1527DE64CB8D9
sudo add-apt-repository "deb [arch=amd64] http://dist.carla.org/carla $(lsb_release -sc) main"
2. 安装Carla并查看位于 /opt/ 文件夹的安装文件:
sudo apt-get update # 更新Debian包目录
sudo apt-get install carla-simulator # 下载最新版Carla 或者对于现有版本进行更新
cd /opt/carla-simulator # 安装成功后打开文件夹
此存储库包含CARLA 0.9.10及更高版本。要安装特定版本,可以输入以下命令:
apt-cache madison carla-simulator # List the available versions of Carla
sudo apt-get install carla-simulator=0.9.10-1 # 这个例子中 "0.9.10" 是CARLA 版本
b. 压缩包下载
首先先粘上官方的github下载地址:Releases · carla-simulator/carla · GitHub
如果下载速度太慢可以尝试这个镜像网站:SUSTech Open Source Mirrors
Carla默认下载时会包含以下几个Town的地图:Town 01,02,03,04,05和Town10,需要更多更加全面的测试地图,如大型城镇等,需要下载附加资源包,下面是官方对于每个Town的简短说明:
https://carla.readthedocs.io/en/latest/core_map/#non-layered-maps
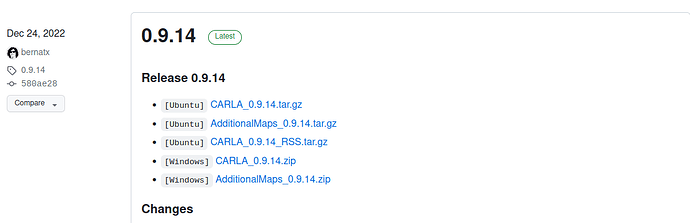
下图图例为镜像网站,第一个文件是附加资源包,第二个文件为Carla本体,附加资源包需要在本体安装后导入,对本体的正常运行没有影响。

下载完成后就可以跳转到目录去解压了。
输入:
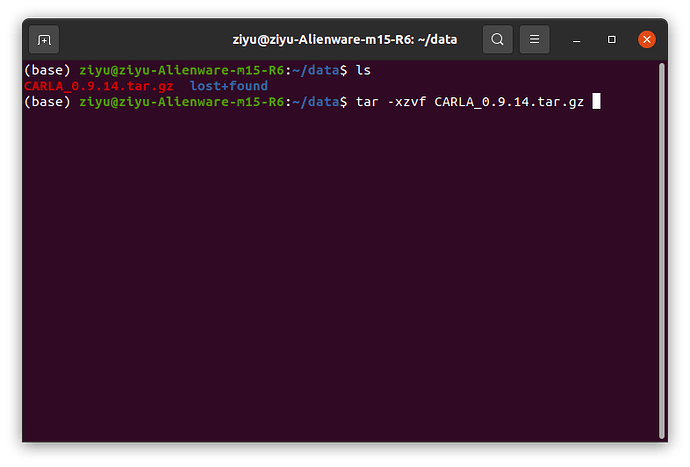
tar -xzvf CARLA_0.9.14.tar.gz
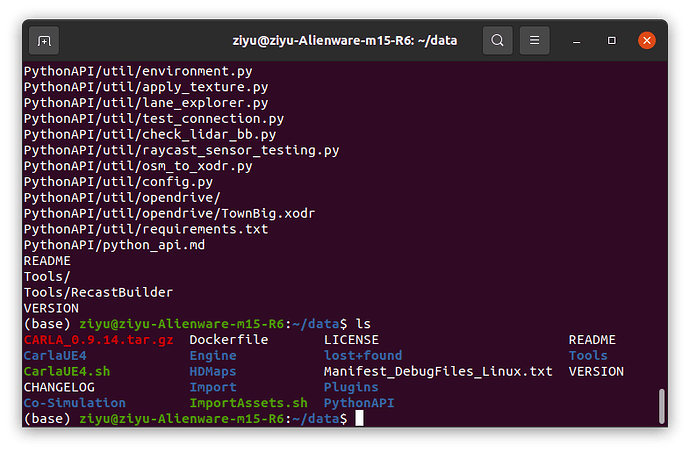
解压完成后会有这些文件:
1. Carla运行
运行Carla,只需要在对应目录下输入:
./CarlaUE4.sh
就可以运行了,Ubuntu 20.04版本删除了libomp.so.5 用Ubuntu 20.04版本的伙伴们需要重新下载,
在终端中输入:
sudo apt-get install libomp5
如果遇到Segfault Signal 6 Caught(如下图) 不要慌,输入这个指令:
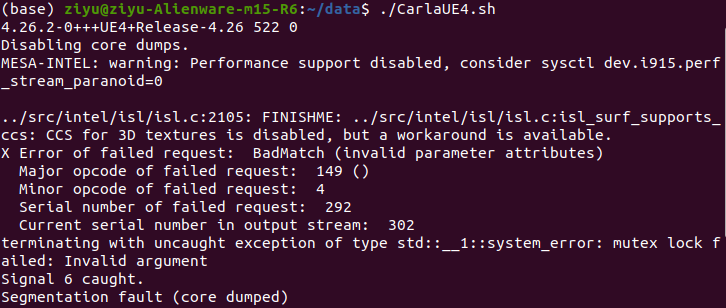
./CarlaUE4.sh -prefernvidia
就可以正常运行Carla了。
如果Carla进入之后发现有明显卡顿,掉帧,渲染错误,可以检查一下显卡驱动是否正常,终端输入:
nvidia-smi
检查显卡驱动是否正常,Ubuntu默认使用集成显卡,如果显卡驱动有问题可以参考这个链接的流程:
Ubuntu安装nvidia驱动_ubuntu安装nvidia显卡驱动_小潇港哥的博客-CSDN博客
2. Carla初试
现在Carla已经可以运行起来了,不过我们现在只能操作观察者移动,四处查看一下这个新创建的world(Carla中的一个重要概念,后续会详细说明):
Q - 向下飞
E - 向上飞
W - 向视角前方飞
S - 向视角后方飞
A - 向视角左方飞
D - 向视角右方飞
官方文档中Q为向上飞,E为向下飞,但经我试验感觉官方文档写反了。
想要正式使用,操作Carla,我们需要配置Python环境与相关依赖,推荐在Python3.7下进行,其他Python版本理论上也是可行的,这里用Python3.7来做演示。
下面操作需要用到Anaconda,可以参考这个链接下载:
【Ubuntu 1】ubuntu的软件包_Kin__Zhang的博客-CSDN博客
终端输入:
conda create -n py37 python=3.7
conda activate py37
下面我们需要安装pygame和numpy依赖,这里给出pip升级,换源并下载安装的指令,注意在Python3.7环境下安装:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pip -U
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip install pygame numpy
接下来我们来到官方给的案例的目录:
cd PythonAPI/examples/
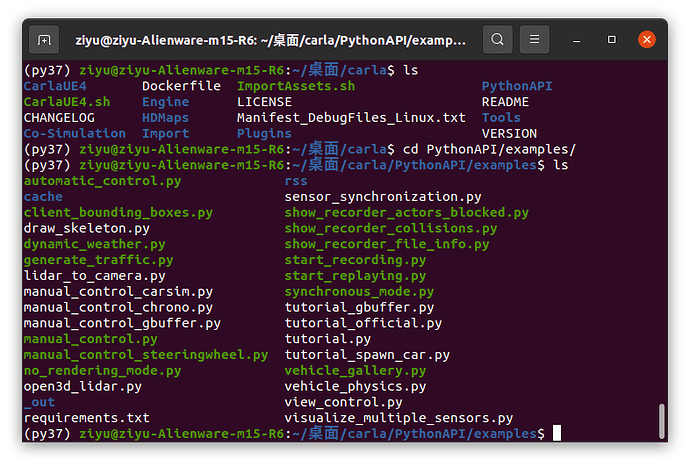
可以看到里面有很多官方给我们的案例,我们可以尽情尝试,体验,注意在运行PythonAPI里的案例程序时,我们要保证Carla处于运行状态,也就是要先用./CarlaUE4.sh 启动Carla之后才能运行Python程序。
在启动Carla之后我们就可以运行一些example程序了:
python generate_traffic.py

运行成功之后我们就会发现我们的街道上开始有车辆和行人了

当然,学习自动驾驶必须有一辆主车进行测试,运行下面的程序,就会有一辆由Carla控制的自动驾驶小车出现作为测试主车了:
python automatic_control.py

同时,我们还可以在屏幕左边的面板里看到小车的各种信息,如油门,刹车,转向等等…
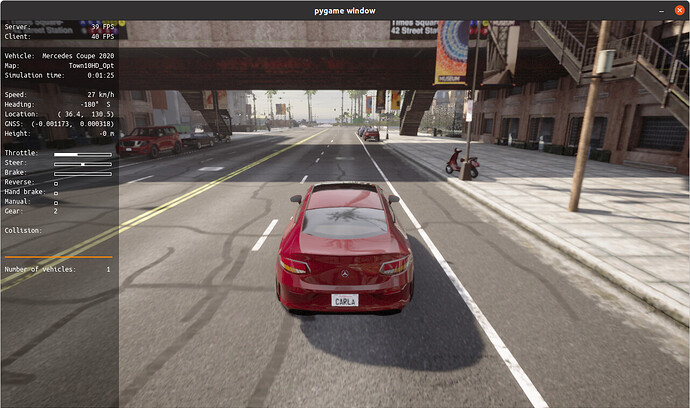
automatic_control.py 的默认启动参数会随机一个起始点和一个终点,当车辆行驶到终点时就会自动退出程序,想让程序连续运行我们可以输入:
python automatic_control.py -l 或者 python automatic_control.py --loop
当然,官方给出的案例远不止这些,,每个案例的可调参数也不止这些,有兴趣的伙伴们可以自行尝试不同的example程序,或者阅读源码。
3. 导入附加地图
需要更多更全面地图的伙伴们可以下载附加资源包,这里会演示如何将附加资源导入到我们的Carla里面
英文能力强的伙伴们可以直接参考英文官方文档:Quick start package installation - CARLA Simulator
这里也提供一下图文流程:
首先是把下载下来的附加资源包放到/carla/Import文件夹下:

之后回到Carla的根目录,运行这个指令就可以成功安装附加资源了:
./ImportAssets.sh
4.后话:本文主要参考了以下两篇文档:
【仿真】Carla简易安装 Window Ubuntu均适用 附ROS的简单连接 [0]_ros opendrive_Kin__Zhang的博客-CSDN博客
https://carla.readthedocs.io/en/latest/start_quickstart/
笔者目前也在积极学习Carla当中,如果文章有错处希望大家指出,有好的观点以及Carla的经验也都十分欢迎分享,让我们一起共同学习进步,共勉!