笔记来源于:沈阳无距科技-工业级无人机的中国名片(编程外星人)
目录
一、多旋翼直升机
二、基本飞行姿态
三、多旋翼飞行原理
四、反扭力与偏航运动
五、螺旋桨
六、有刷电机和无刷电机
七、电调与PWM信号
八、动力电池
九、遥控器
十、机架设计
十一、开源自驾仪Pixhawk简介
十二、飞行模式
其中,飞控程序下载与编译,航前准备与传感器校准,两个比较重要,但是没有列出来,给出链接!
一、多旋翼直升机
无人驾驶飞机,简称无人机,英文Unmaned Aerial Vehicle, UAV
二、基本飞行姿态
- 上升:四个桨产生的拉力总和大于机身重力
- 下降:当总拉力小于机身重力
- 悬停:总拉力等于机身重力
- 横滚 roll
- 俯仰 pitch
- 偏航 yaw
三、多旋翼飞行原理
-
roll/pitch:当左右两个桨的转速出现不同时,准确的说是当左右两个桨所产生的拉力不同时,飞机就会以其中心点为转动轴以螺旋桨的位置为受力点,产生一个力矩。在这个力矩的作用下飞机左侧将上升,右侧将下降,也就是以机身中心点为转轴进行滚转运动
-
roll/pitch:进行受力分析,按照原有的情况的话,飞机会在垂直方向上向下加速运动,当飞机处于滚转姿态时,飞机会向滚转的方向作加速运动,同时会在垂直方向上做下降加速运动
-
roll/pitch:定高模式:飞机保持一定高度,在水平高度上做加速动作(增加整体拉力,竖直方向平衡重力)。滚转角越大,所需要的总体的拉力也越大。要是要处于匀速状态,则需要不断改变滚转角直至为0
-
yaw:改变机身方向,也就是说俯仰和滚转的所产生的力的方向在惯性坐标系下的方向就发生了改变。比如适当增加其中一对的电机产生的拉力,那么这边的反扭力就会大一点,机身就会旋转了(那个防止自旋的原理)
四、反扭力与偏航运动
-
向下的推力是桨对空气的作用力,根据反作用力原理,空气就会对桨产生一个向上的推力。这就是空气对桨进而作用到机身垂直方向的拉力
-
水平方向对空气的推力同样会产生一个空气对桨的反作用力,方向与作用力相反,其所用到多旋翼的轴臂上,就产生了我们所说的反扭力,也称反扭力矩
-
克服自旋:让相邻的两个电机转动方向相反,使它们所产生的反扭矩相互抵消,无人机就不会再出现自旋了
-
偏航运动:适当调节各自的反扭矩大小
五、螺旋桨
-
螺距:螺旋桨在螺旋线方向上两个相邻螺纹之间的距离。
- 通常这个距离用英寸来表示,例如7050、8045、9045、1045。
- 前两个数字,表示其直径的大小;后两个数字表示其螺距
- 桨的直径越长,在相同电机转速下其拉力越大,直径越小拉力越小。在直径、螺距、电机转速相同的情况下,桨叶越多其拉力越大,但是其转动惯量与空气阻力也就越大,因此,通常情况下三叶桨与四叶桨的效率并没有二叶桨的效率高
-
桨的弦长:通常在中心向外2 / 3 处测量桨叶的宽度
- 为了增加桨的动能使用效果,从无人机的结构设计考虑还可以在桨的外侧安装涵道。根据伯努力原理,涵道内侧由于有螺旋桨的高速旋转,带动气流快速下降,涵道外侧气流流动缓慢,所以涵道外侧气压会大于外侧气压,于是空气会产生一部分向上的拉力。也就是会提高飞机的动力。但是增大了飞机质量。
六、有刷电机和无刷电机
-
有刷电机:有刷电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化靠随电机转动的换向器和电刷来完成的。 有刷电机是内含电刷装置的将电能转换成机械能(电动机)或将机械能转换成电能(发电机)的旋转电机。
-
无刷电机:无刷电机实际上应该叫无刷直流电机,结合了交流电机和直流电机的优点,采用永磁体做转子(尤其是采用稀土永磁体)用电子开关代替直流电机中的换向器和电刷,所以转子的静平衡和动平衡都容易做好。
-
电机参数:看到电机型号会注明2212 2216 2312等等,前两个数字表示电机定子的直径,后两个数字表示电机定子的高度,单位均是毫米。
-
指标KV值:表示电机在空载(不安装螺旋桨)的情况下,电压每增加1v,电机每分钟的转数增加多少。电机KV值越小,说明电机的动力越大,但速度越低;而KV值越大,说明电机的动力越小,但速度越快。类似于汽车的档位。
七、电调与PWM信号
电调就是电压调节器,也可以通俗的说成是电机调节器。
电调可以通过接收PWM信号来将输入的电源转为不同的电压,并输出到电机,从而达到使电机产生不同的转速的目的。
有刷电调可以改变电流方向,从而可以改变电机转动方向。而无刷电调却不能改变电机的转动方向,但是可以将直流电转为三相交流电,从而输出到无刷电机上。
-
最高电压:表示电调所支持的最高电压。通常在电调上会标有Li-Po3(3节锂电池)、Li-Po4(4节锂电池)或Li-Po6(6节锂电池)等字样,表示电调所支持的最高电压是12.6v、16.8v或25.2v。
-
电调的最大电流:它表示流经电调本身的电流的最大值,通常是10A、15A、20A、30A或40A。如果在无人机飞行过程中我们需要电机高速转动,就需要更高的电压和更大的电流,如果电流值超过电调所能承受的最大电流时,就会导致电调过载,电调烧毁,电机停转,进而坠机的情况。
- 电调可接受的PWM信号是50%到100%而不是0%到100%,原因是为了对电机做保护
八、动力电池
锂电池,用LiPo表示,每节锂电池的电压通常为3.7v到4.2v,也就是说每一节锂电池的空电电压为3.7满电电压为4.2v。
锂电池的放电效果要比普通镍氢电池或镍锂电池好。
-
电量:表示了动力电池能够存储的电能的多少,单位为毫安时。是我们所常用的3000mah、4000mah、5300mah或10000mah等等。
-
放电倍率:放电的速率。通常是有15C、20C、25C或30C等等。
例如:我们有一块10000mah 20C的电池。
- 按每小时10000毫安的放电速度持续放电1个小时;
- 以5倍速度放电,即以每小时50000毫安的放电速度持续放电12分钟(60 / 5);
- 以10倍速度放电,即以每小时100000毫安的放电速度持续放电6分钟(60 / 10);
- 以20倍速度放电,即以每小时200000毫安的放电速度持续放电3分钟(60 / 20)
九、遥控器
遥控器想到达到与无人机通信的功能需要有两部分配合完成。即:发射器与接收机。
遥控器上的控制杆转为无线电波发送给接收机,而接收机通过接收无线电波,读取遥控器上控制杆的读数,并转为数字信号发送到无人机的控制器中。
目前用于无人机遥控器主流的无线电频率是2.4G,这样的无线电波的波长更长,可以通信的距离较远,普通2.4G遥控器与接收机的通信距离在空旷的地方大概在1km以内。所谓的2.4GHz所指的是一个工作频段2400M-2483M范围,这个频段是全世界免申请使用。但不同的通讯协议衍生出的通讯方式会有着天壤之别。
关于遥控器与无人机的通信协议也有很多种,常见的数据协议如下:
-
pwm:需要在接收机上接上全部pwm输出通道,每一个通道就要接一组线,解析程序需要根据每一个通道的pwm高电平时长计算通道数值。
-
ppm:按固定周期发送所有通道pwm脉宽的数据格式,一组接线,一个周期内发送所有通道的pwm值,解析程序需要自行区分每一个通道的pwm时长。
-
sbus:每11个bit位表示一个通道数值的协议,串口通信,但是sbus的接收机通常是反向电平,连接到无人机时需要接电平反向器,大部分支持sbus的飞行控制板已经集成了反向器,直接将以旧换新机连接到飞行控制器即可。
-
xbus:常规通信协议,支持18个通道,数据包较大,串口通信有两种模式,可以在遥控器的配置选项中配置。接收机无需做特殊配置。
主控制面板中的4个控制杆分别对应油门、航向、滚转、俯仰。除了这4个主控制通道以外,遥控器还有其它一些控制杆或控制旋钮。用于给用户自己定义。
十、机架设计
机架需要承载无人机的全部设备,包括飞行控制器、电调、电机、螺旋桨、遥控器接收机、电池、电源、云台等等
-
轴距:电机轴心轴围成 的外科外接圆周的直径,单位毫米mm,对称多旋翼无人机中轴距即为对角线上的两个电机轴心的距离,轴距的大小确定了螺旋桨的尺寸上限,从而限定了螺旋桨能产生的最大拉力
-
起落架:作用是使得机身与地面之间有一个安全距离,使飞机在离地面不远处起飞或降落时由于不稳定因素所造成的机身倾斜而不至于使螺旋桨与地面发生碰撞。另外在起落架使得螺旋桨与地面之间有足够的空间,飞机起飞和降落时,可以有效减小气流与地面产生的气流干扰。
-
涵道:保护桨叶的同时也保证人的安全,还可以提高飞行的拉力效率和减少噪声
十一、开源自驾仪Pixhawk简介
pixhawk是一套集成了传感器、输入输出功能及嵌入式处理芯片的电路板。
它主要由两部分构成:PX4FMU 和 PX4IO
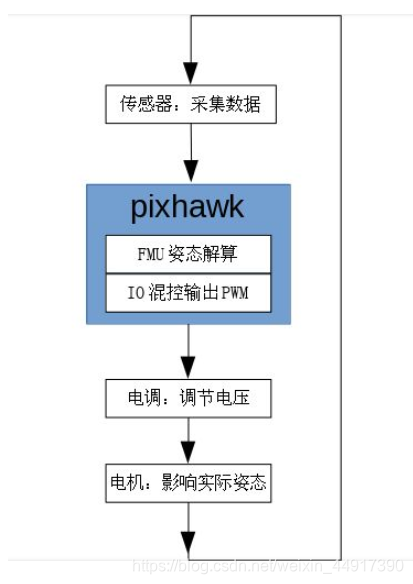
-
FMU:集成了STM32F427处理芯片,MPU6050三轴加速计和三轴陀螺仪、MS5611气压计、LSM303D加速度计和磁罗盘。以及丰富的总线接口,4路串口、SPI、I2C、ADC接口等等。主要负责对传感器的数据进行采集并进行姿态和位置解算,并通过经典PID控制程序输出控制量到IO程序中,生成飞行控制量,进而控制飞机的飞行。
-
IO:电路板中采用的芯片为SMT32F103C8,主要负责的是输入和输出。输入部分指以SBUS协议的遥控器串口信号。输出部分共有13个PWM信号接口,其中M1-M8为主动力通道,接主动力电调电机,而A1-A5为可选外设的辅助通道。可以接一些其它设备,例如云台和相机等。
十二、飞行模式
在开源飞控程序PX4中预先定义了13种飞行模式,列表如下:
- Manual——手动模式
- Altitude——高度模式:
MPC_Z_VEL_MAX_UP 最大上升速度,默认值: 3 m/s.
MPC_Z_VEL_MAX_DN 最大下降速度,默认值: 1 m/s.
- Position——位置模式
MPC_HOLD_DZ 在滚转和俯仰通道偏离中心位置小于阈值时为Hold模式,即保持当前位置不动,默认值为:0.1(即10%)。
MPC_VEL_MANUAL 水平飞行速度最大值,默认值: 5 m/s。
-
Mission——任务模式(航迹点模式):事先在地面站上为飞机规划出一条飞行航线,然后再将这条航线上传到无人机当中,当无人机切换到任务模式时,就可以按预先指定的航迹点进行飞行。
- Hold——定点模式(同3)
- Takeoff——起飞模式
MIS_TAKEOFF_ALT 起飞高度,到达此高度后悬停,默认值为:2.5m
MPC_TKO_SPEED 起飞速度,在起飞模式下上升的速度,默认值为:1.5m/s
MPC_LAND_SPEED 着陆速度,在降落模式下下降的速度,默认值为:1m/s
COM_DISARM_LAND 着陆后多久自动锁定电机,默认值为:0.5s
- Land——降落模式
- Return——返航模式
RTL_RETURN_ALT 返航高度,默认值为:30m
RTL_DESCEND_ALT 悬停高度,默认值为:15m
RTL_LAND_DELAY 悬停时间,默认值为:30s
RTL_MIN_DIST 触发上升到安全高度的最小水平距离TL_RETURN_ALT,如果飞机水平靠近起飞点则以当前高度返回,而不是先上升到RTL_RETURN_ALT。
- Acro——特技模式
-
Offboard——离线模式:无人机可以在脱离遥控器控制的情况下离线飞行,但前提是需要有地面站指令(目前PX4采用的是Mavlink协议与地面站通讯)对飞机进行控制。在此模式下,地面站对无人机的控制指令比较简单。例如:起飞、悬停、执行预设任务、指定目标点飞行、返航、着陆等等。
- Stabilized——增稳模式(同1)
- Rattitude——姿态特技(同9)
- Follow Me——跟随模式:跟随模式通过使用GPS和其他定位信息,无人机能够在指定的位置和距离处自动偏航以面向并跟随目标。
-
Extern control——外部控制(作者自行开发的扩展模式):作者自己开发了一个叫作外部控制的飞行模式,采用了Pixhawk(运行PX4飞控)+ RaspberryPI3(运行外部控制器程序)一起控制飞行。它们之间使用串口进行通讯,Pixhawk将无人机当前的状态(系统状态、姿态、速度、位置)实时发送给RaspberryPI3,而RaspberryPI3根据飞机当前的状态和租航线规划自动计算飞机当前的期望(期望位置、期望速度和期望姿态),并实时发送给Pixhawk,Pixhawk运行PX4程序控制飞机根据当前的期望值进行飞行。