文章目录
- 【CH1】 Introduction
- 一. Motion Planning 概念
- 二. Front-end:Path finding
- 1. Search-based methods
- 2. Sampling-based methods
- 3. Kinodynamic Path Finding
- 三. Back-end:Trajectory Optimization
- 1. minimum-snap
- 2. Hard constrained minimum-snap
- 3. Soft constrained minimum-snap
- 四. Map representation
- 1. grid map
- 2. octomap
- 3. voxel hashing
- 4. point cloud map
- 5. TSDF map
- 6. ESDF map
- 【CH2】 Search-based path finding
- 一. Configuration Space
- 二. Graph and Search method
- 1. overview
- 2. graph traversal
- 三. Heuristic search
- 1. Greedy Best First Search
- 2. Djikstra
- 3. A *
- 4. JPS
- 【CH3】 Sample-based path finding
- 一. PRM
- 二. RRT
- 三. Optimal sampling-based path planning methods
- 1. RRT*
- 2. Kinodynamic RRT*
- 3. Anytime-RRT*
- 四. Advanced Sampling-based Methods
- 1. Informed RRT*
- 2. Cross-entropy motion planning
- 【CH4】Kinodynamic path finding
- 一. State Lattice Planning
- 1. sample in control space
- 2. sample in state space
- 二. Boundary Value Problem
- 1.Optimal Boundary Value Problem
- 三. Hybrid A*
- 四. Kinodynamic RRT*
【CH1】 Introduction
一. Motion Planning 概念
机器人运动规划:
前端: path finding
- search for an initial safe path
- low dimensional
- discrete space
path finding 找到一个 collision free 的运动路径。
后端: trajectory generation/optimization
- search for an executable trajectory
- high dimensional
- continuous space
从前端得到一个低维,粗略的路径之后,使用优化的技巧,把它变成高维的,满足机器人动力学要求的,光滑连续,安全保证等要求的一个路径,称为轨迹 motion planning.
二. Front-end:Path finding
1. Search-based methods
2. Sampling-based methods
- PRM
- RRT
- RRT*
- Informed RRT*
3. Kinodynamic Path Finding
- State lattice seach
- Hybrid A *
- Kinodynamic RRT*
三. Back-end:Trajectory Optimization
1. minimum-snap

2. Hard constrained minimum-snap
3. Soft constrained minimum-snap
四. Map representation
1. grid map
2. octomap
3. voxel hashing

4. point cloud map
5. TSDF map
Truncated Signed Distance Functions
体素存储的是传感器射线到测量物体表面的距离。具体:一个视锥的范围内,存储物体表面[-delta,delta]距离内的值。

6. ESDF map
Euclidean Signed Distance Functions
【CH2】 Search-based path finding
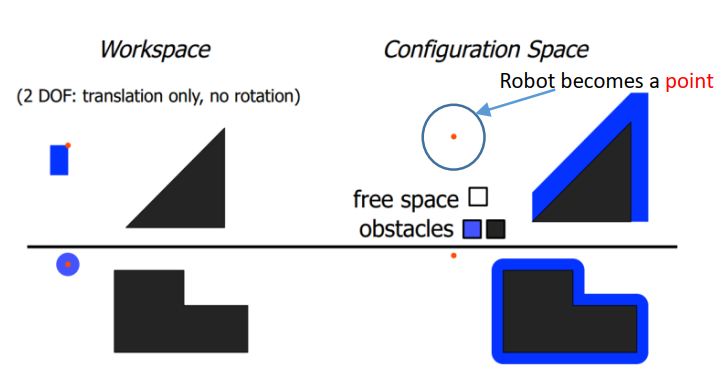
一. Configuration Space
机器人原来是在工作空间中,根据机器人的大小对障碍物进行膨胀,此时机器人可以看成一个点,都转到配置空间中。
二. Graph and Search method
1. overview
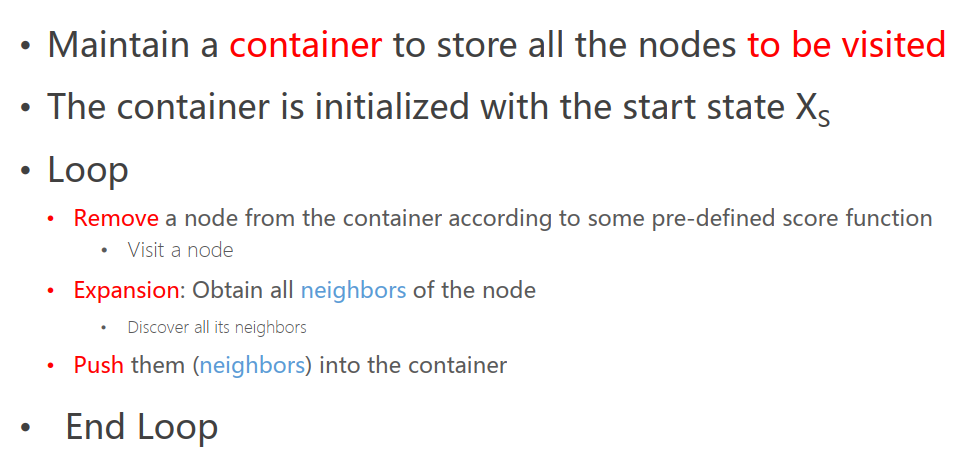
2. graph traversal
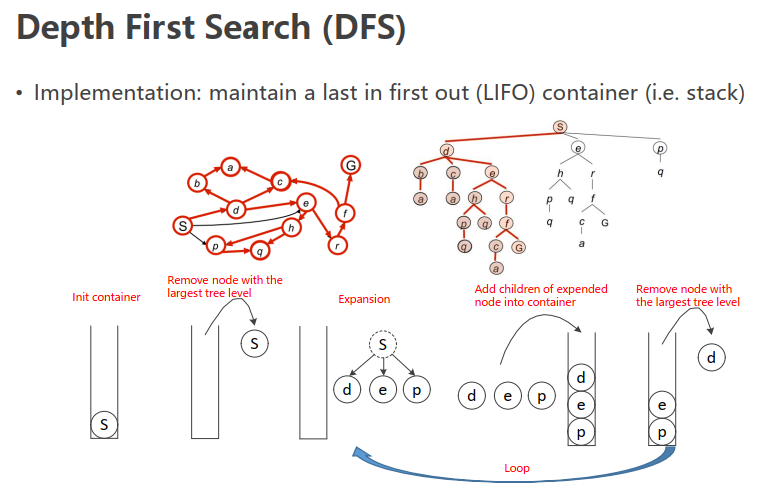
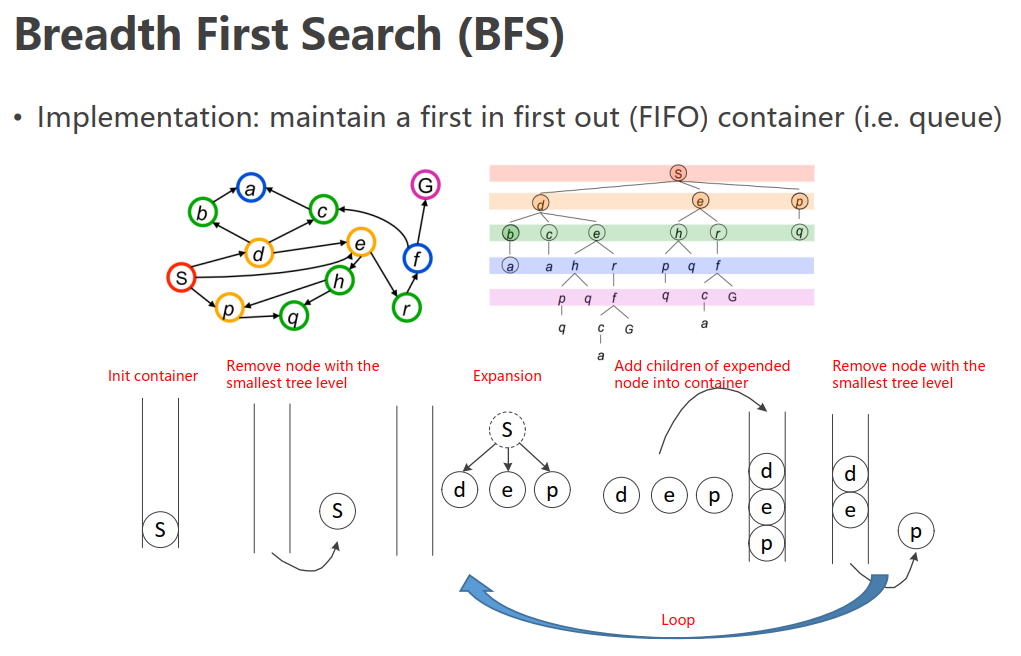
广度优先搜索(BFS)维护的容器是队列,深度优先搜索(DFS)维护的容器是堆栈。
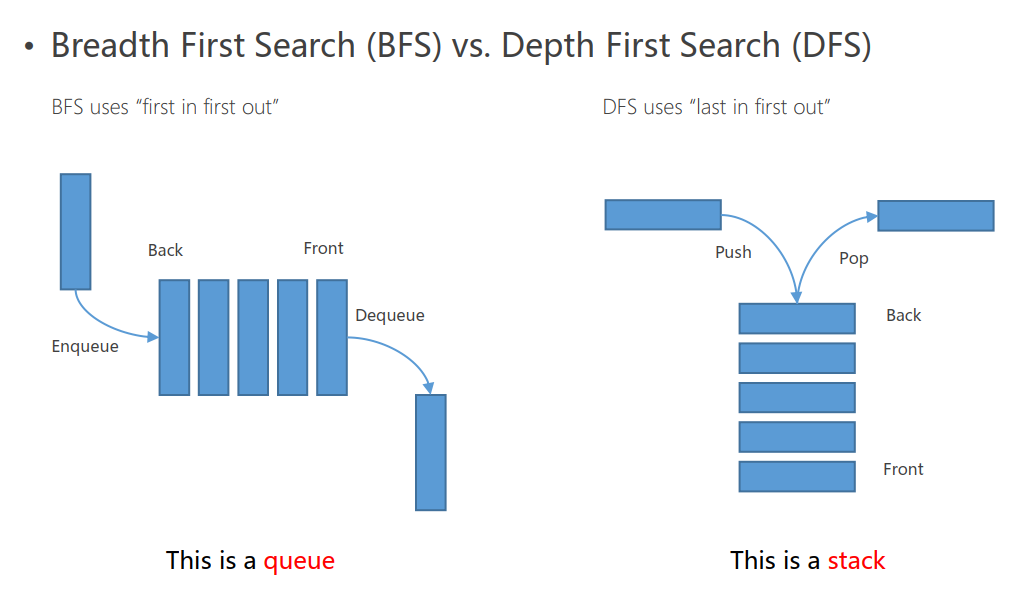
DFS:维护的是堆栈,节点先进后出。所以后加进来的节点会首先弹出来,然后扩展,再压进堆栈,不断循环,直观的理解就是会朝着某一个方向搜索,即深度优先。
BFS:维护的是队列,节点先进先出。先加进来的节点会首先弹出来,然后扩展,再压进堆栈,不断循环,直观的理解就是它是一层一层不断扩展搜索的,即广度优先。
三. Heuristic search
1. Greedy Best First Search
BFS 和 DFS 从容器中弹出节点是根据 " first in" 或者 “ last in ” 的规则。
贪心算法中,从容器中弹出节点的规则是自己定义的,叫做 heuristic
2. Djikstra
3. A *
4. JPS
Jump Point Search
核心:find symmetry and break them
【CH3】 Sample-based path finding
一. PRM
Probabilistic Road Map
第一个阶段:Learning phase
- Sample N points in C-space
- Delete points that are not collision-free
- Connect to nearest points and get collision-free segments.
- Delete segments that are not collision free
如下图所示:采样N个点,删除那些在障碍物内的点。然后把点与点连接起来,但是连接时对距离做一定的限制,如果连线超过一定的距离,就不连了。此外连线中经过障碍的也要删去。

第二个阶段:Query phase
- Search on the road map to find a path from the start to the goal (using Dijkstra’s algorithm or the A* algorithm).

此外:Lazy collision-checking
在learning 阶段判断采样点落入障碍物中比较费时,这里就不考虑采样点落入障碍物中。
具体过程: 这种 lazy 的方式,只采样点,然后生成连线,但是不考虑采样点碰到障碍物。首先搜索一条路径不考虑障碍物,搜索到路径之后把碰到障碍物的边和障碍物内的采样点删去,再重新搜索。

二. RRT
Rapidly-exploring Random Tree
实现步骤:首先得到一个采样点(蓝色的点),从起点向采样点移动一定的距离
δ
\delta
δ ,得到一个新的红色点,如若这个点是 collision free 的,就把这个点个这条边加入树中。

然后再采样得到一个点
X
r
a
n
d
X_{rand}
Xrand, 找到树上距离
X
r
a
n
d
X_{rand}
Xrand 最近的一个点
X
n
e
a
r
X_{near}
Xnear,然后
X
r
a
n
d
X_{rand}
Xrand 移动一定的距离得到
X
n
e
w
X_{new}
Xnew, 如果
X
n
e
w
X_{new}
Xnew 是 collision free 的就把
X
n
e
w
X_{new}
Xnew 和
E
i
E_{i}
Ei 添加到树中。

三. Optimal sampling-based path planning methods
1. RRT*
2. Kinodynamic RRT*
3. Anytime-RRT*
四. Advanced Sampling-based Methods
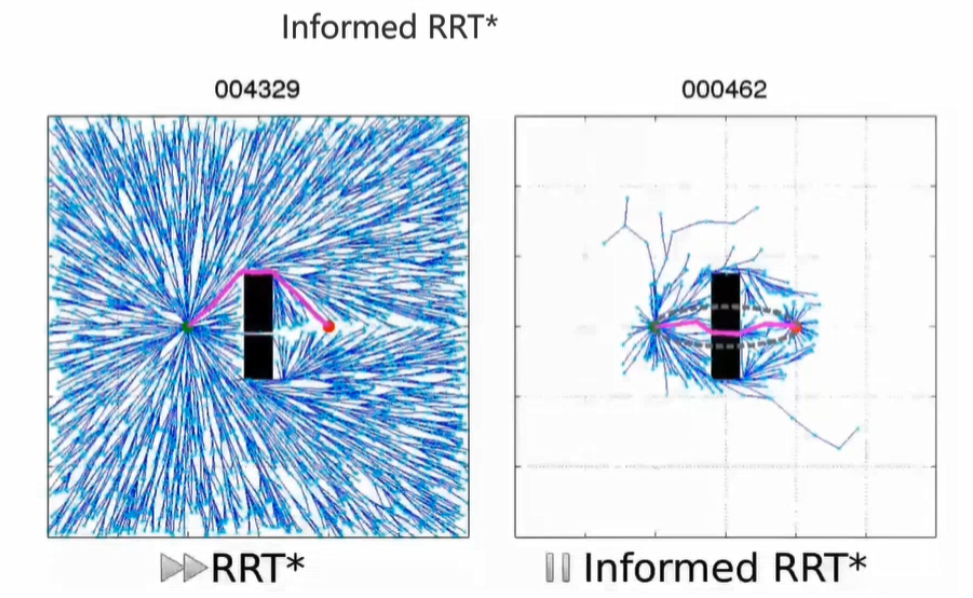
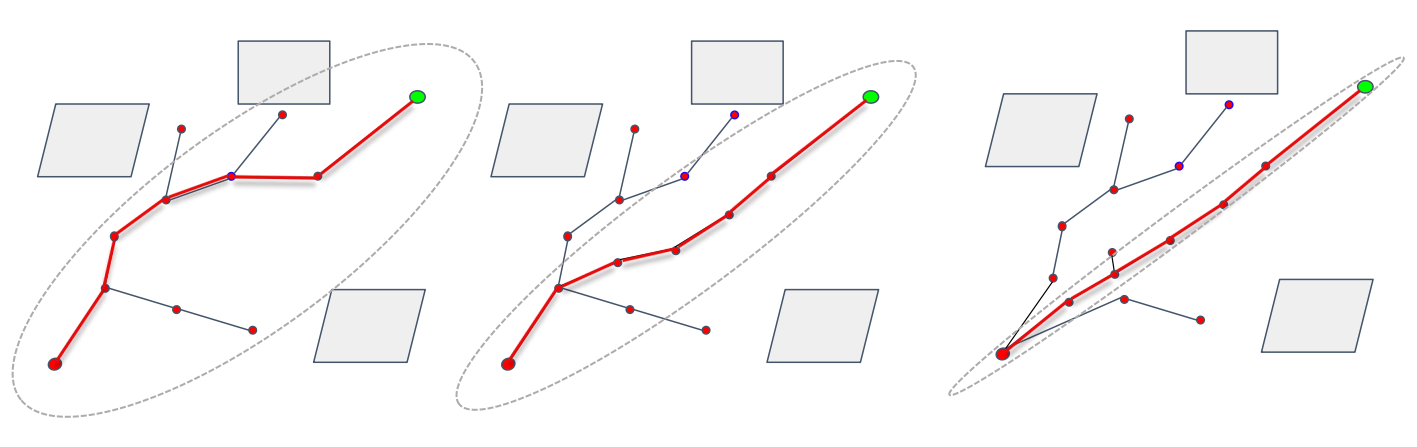
1. Informed RRT*
最左边是路径轨迹的生成部分,但是生成之后不是在整个空间中进行随机点的采样了。把采样范围限制在一个椭圆内。以起点和终点做为椭圆的焦点,生成的路径做为椭圆的常数。随着在限制范围内采样,路径变的优化,同时随着路径变短,椭圆也会变扁,采样范围变小。
2. Cross-entropy motion planning
【CH4】Kinodynamic path finding
希望每两个节点之前是 feasible motion connections
两种方法:
两种方法比较:
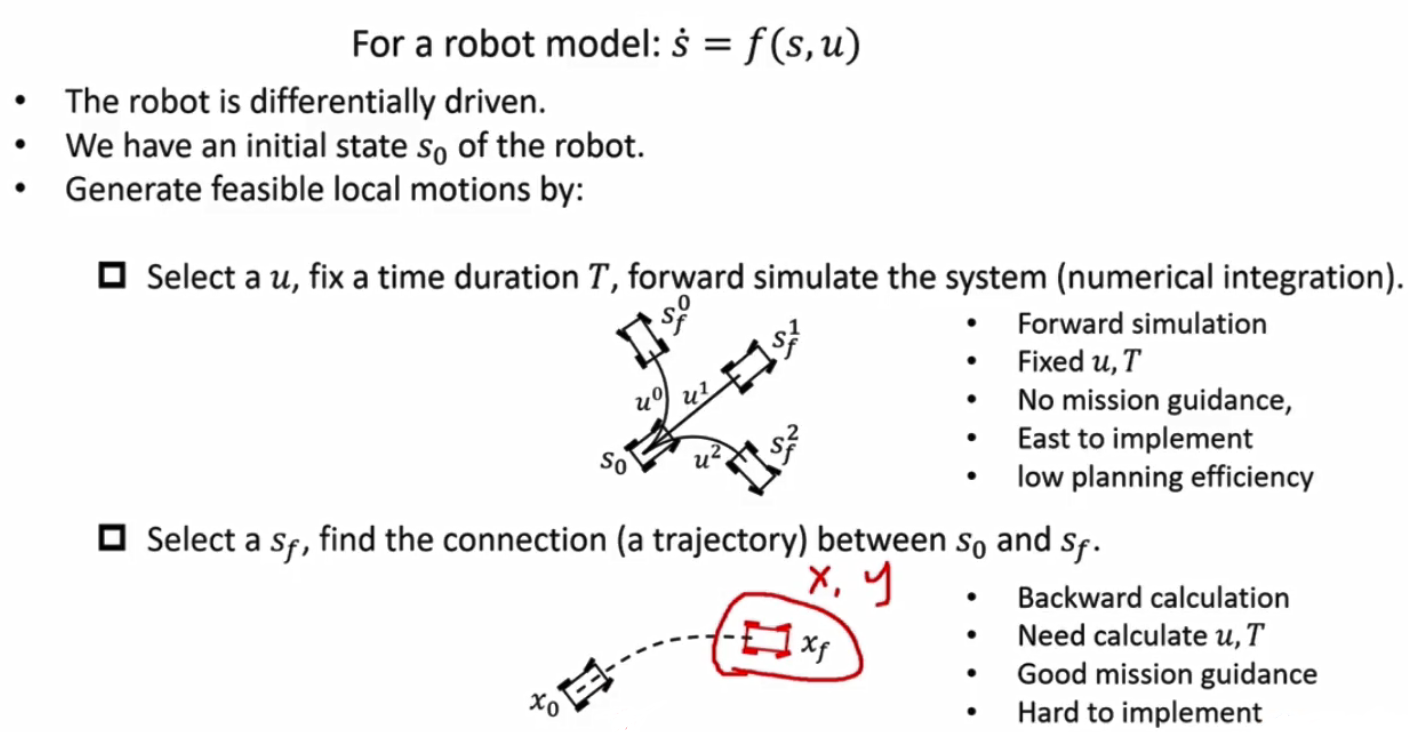
一. State Lattice Planning
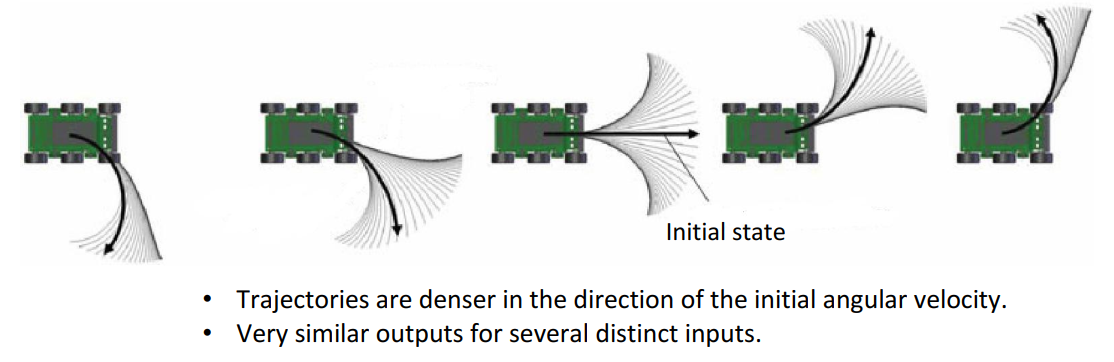
1. sample in control space
问题:离散出来的状态有一条碰到障碍物,其他的几条也很有可能碰到,如何让离散的状态尽量分得开。
2. sample in state space
直接把周围的状态离散出来,反算这条边是怎么连接上的。
二. Boundary Value Problem
通过边界条件(0时刻和T时刻)来解,会得到很多组解,不知道哪一个才是最优的。
1.Optimal Boundary Value Problem
(…一些上学期学的最优控制里的东西)。
三. Hybrid A*
实现的步骤: 和 A * 类似
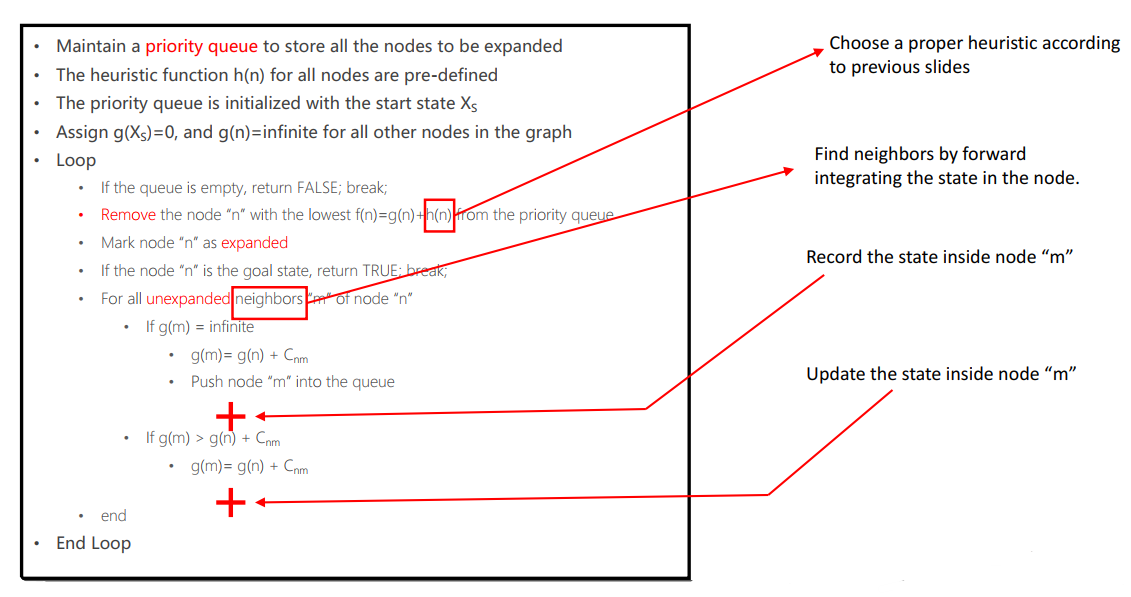
启发函数的选择:
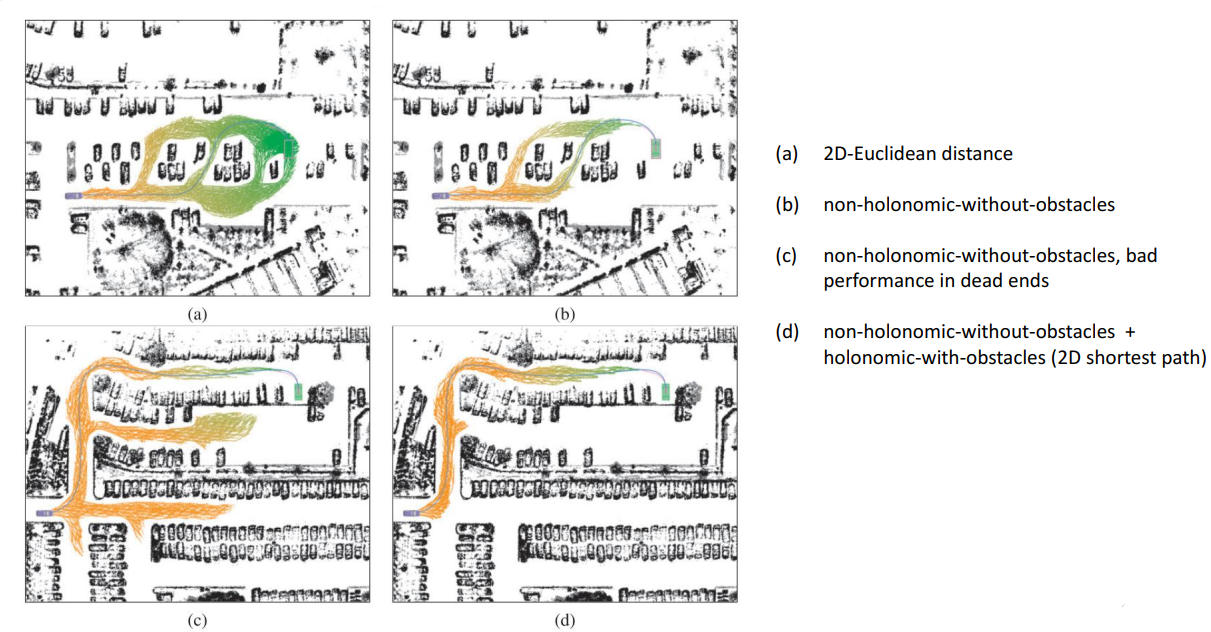
和 A * 的不同点:
- 启发函数的选择
- 根据离散状态,寻找临近的点,不像A * 直接找上下左右相邻的点
- 不仅需要记录代价,还要记录和更新状态
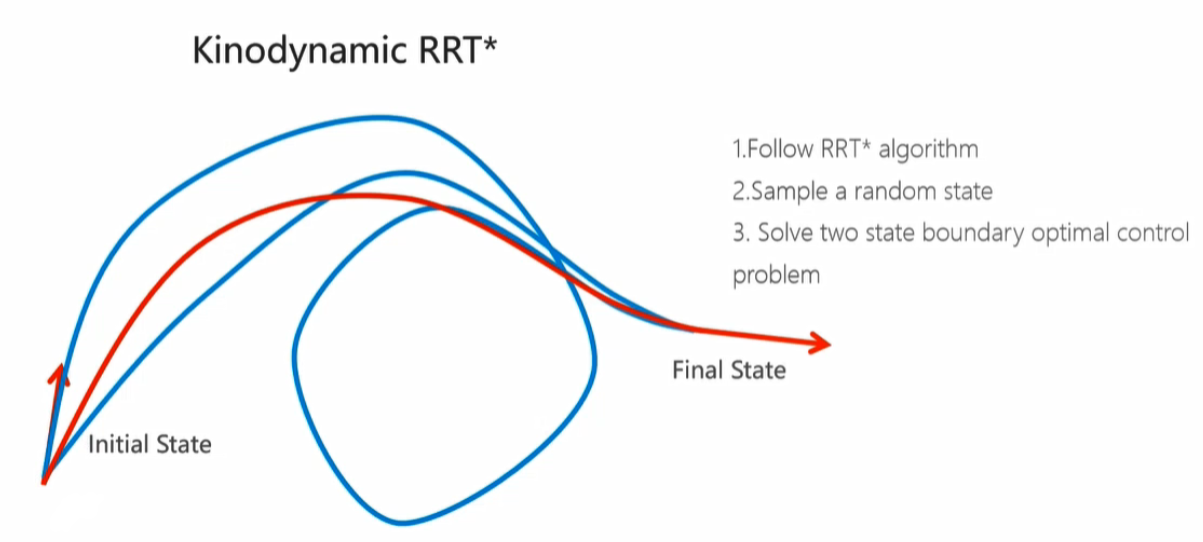
四. Kinodynamic RRT*
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)