要完成一套完整的机器人路径规划,并完成其物理实验并非一件简单的事情。
参考:http://wenku.baidu.com/link?url=n11mP6EDlM78NZYZ4yQYXzmzPeBV6BeLNOUjIv3mAOJIsz7Uc8q44YJxT4eJDHcV92cnCNTg9tBvGzqp48snlnYA4csqDFpwB81ukF_YdOO
在运用好的路径规划算法,规划好一条从起点到目标点最优的路径后,如何让机器人来寻着这条最优的路径走,是一个需要解决的问题。
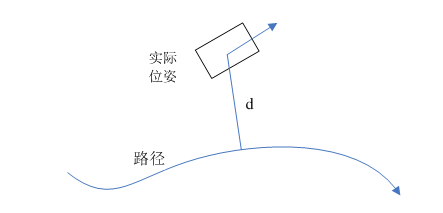
路径跟踪(Path tracking),是在平面坐标系下设定一条理想的几何路径,然后要求机器人从某一处出发,按照某种控制规律到达该路径上,并实现其跟踪运动。
运动学方程
运动学模型直接刻画出了系统位置与速度之间的数学关系,以两轮驱动移动机器人为例,如图所示,运用物理学质点运动分析法可得到
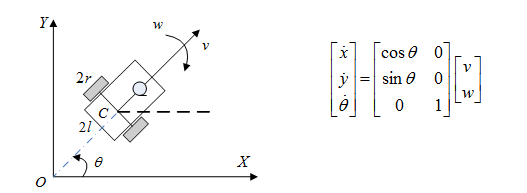
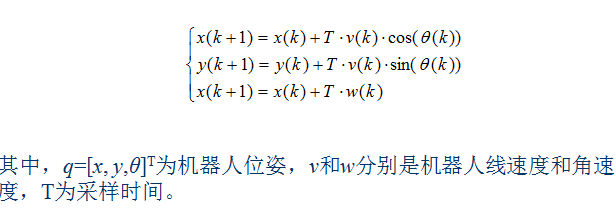
离散化可表示为:
控制规律
假设参考路径可由一系列的参考点组成,即qr=[xr, yr,θr]T,定义位姿误差,即
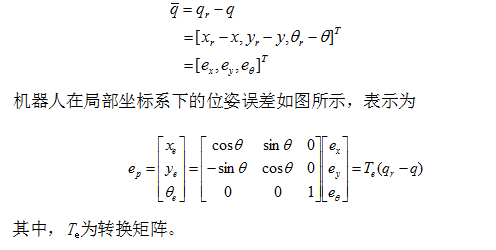
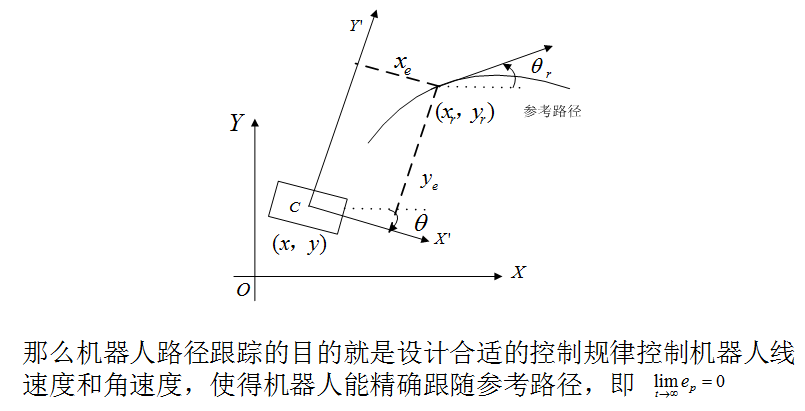
下面就可以设计合适的控制器达到机器人精确跟随参考路径。
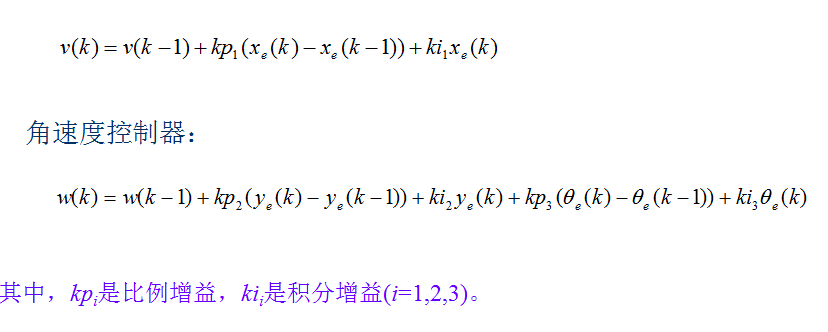
PI控制器的设计
线速度控制器
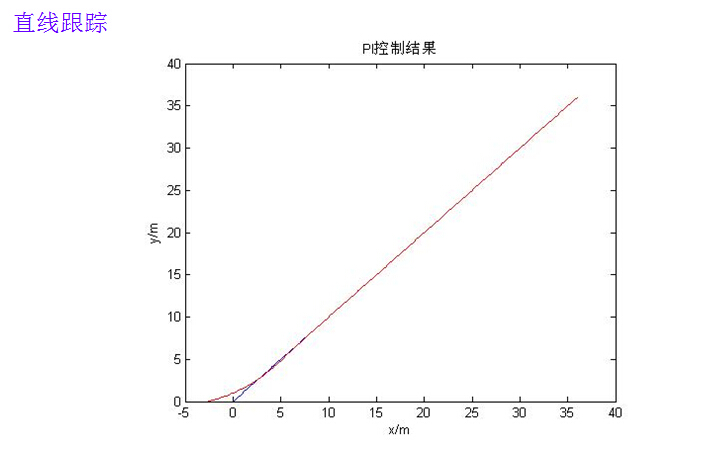
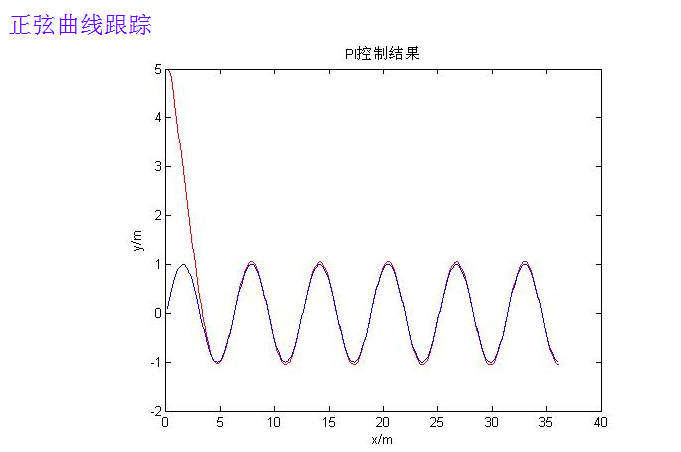
仿真结果
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)