UART、RS232、RS485这些物理层的串口通信,它们都是在同一时间发送一位。 RS232、RS485只是串口通讯的变种,理解了UART串口通讯,那么RS232和RS485也就很好理解了。 了解今天的内容你可能还需要补充下“电平标准”方面的知识,请移步:了解TTL、COMS电平
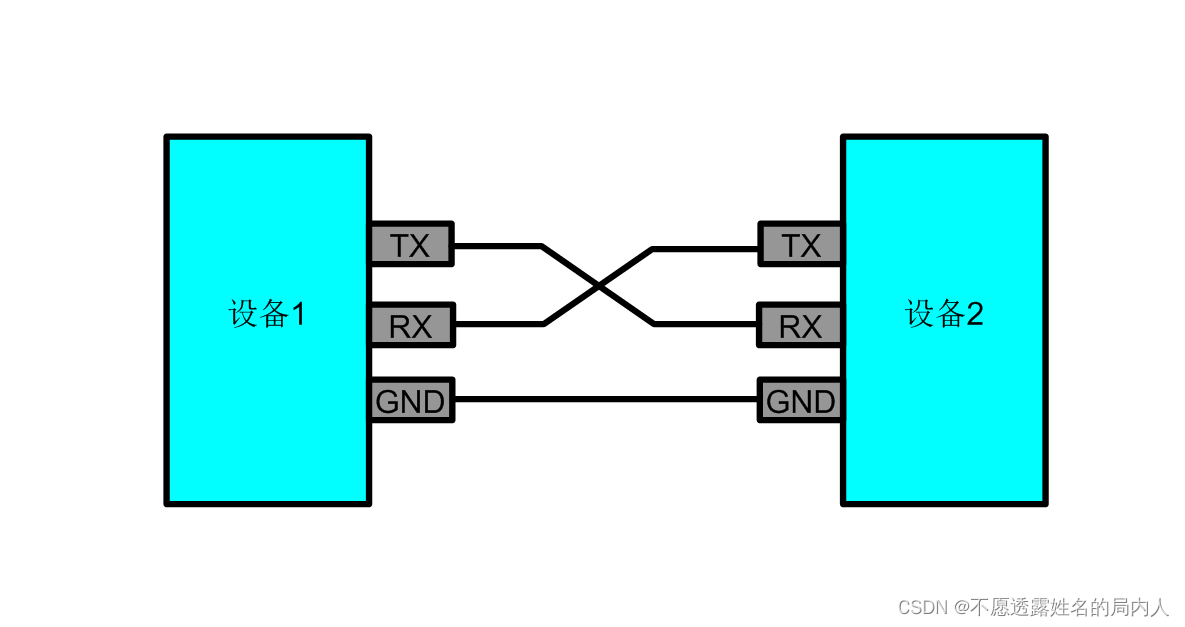
通用异步收发传输器,传输模型如下:全双工,点对点
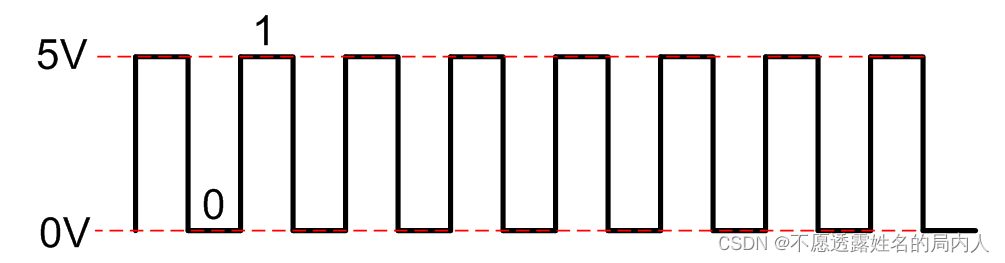
使用TTL电平信号。
抗干扰能力差,传输距离近。 UART一般用于电路板内部通信或者短距离通信,最常用的就是单片机,STM32常规MCU都有,数量从1个到多个不等。 USB转TTL (串口),常用的电平转换芯片CH340,CP2102等
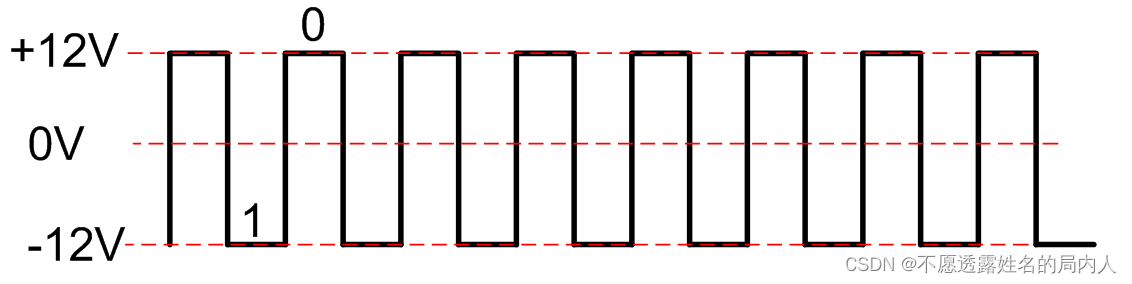
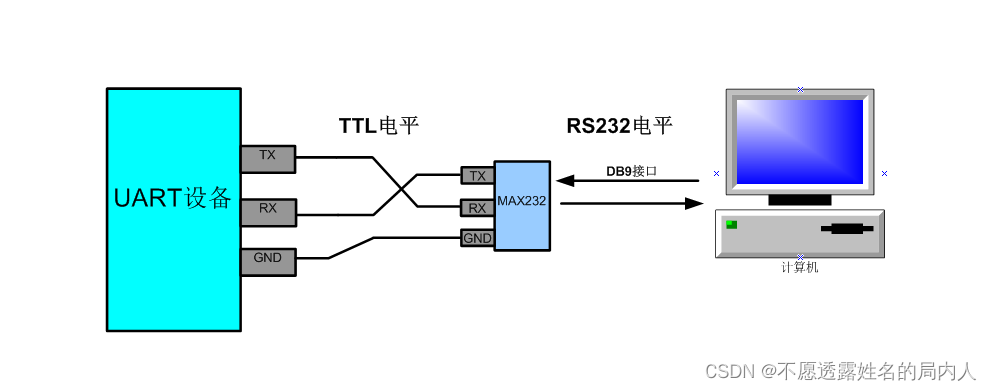
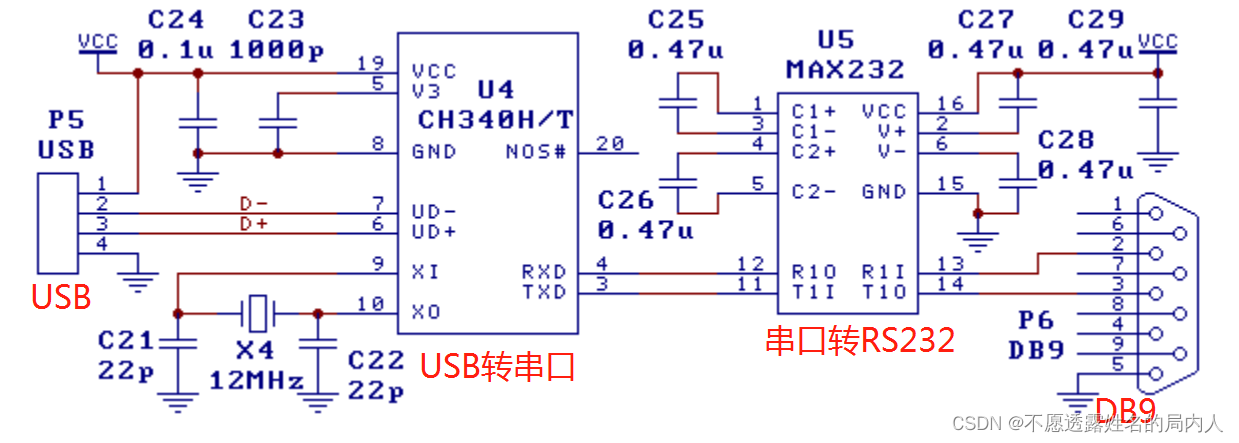
(图片来源于网络) RS232电平标准为反逻辑 逻辑1:的电平为-3~-15V 逻辑0 :的电平为+3~+15V 抗干扰能力较UART增强,传输距离也比URAT更远 传统台式机电脑和现如今的一部分笔记本都还带有RS232接口,如果一个使用UART接口的设备要跟带有RS232接口的电脑或其他类型的设备通信,由于电平不同,他们该怎么通信呢?使用电平转换芯片即可,例如MAX232等。 传输模型如下:全双工,点对点 通讯。 下图是使用CH340T实现USB转换RS232串行接口。CH340提供普通串口信号和MODEM信号,通过电平转换电路U8将TTL串口转换为RS232串口。端点P11为DB9针,该针及其功能与普通九针计算机串行接口相同。与U8类似的有MAX213/ADM213/SP213等 图片是USB转换为基本和常见的三线RS232串行接口,而U5是MAX232 / ICL232 SP232等等。 下图也是USB转换的三个RS232串行接口,这个电路的功能与上图相同。只需添加二极管、三极管、电阻和电容即可替代上图中专用电平转换电路的U5 (MAX232),因此硬件成本较低。 常用的USB转232线缆,如下图所示。 (图片来源于网络)
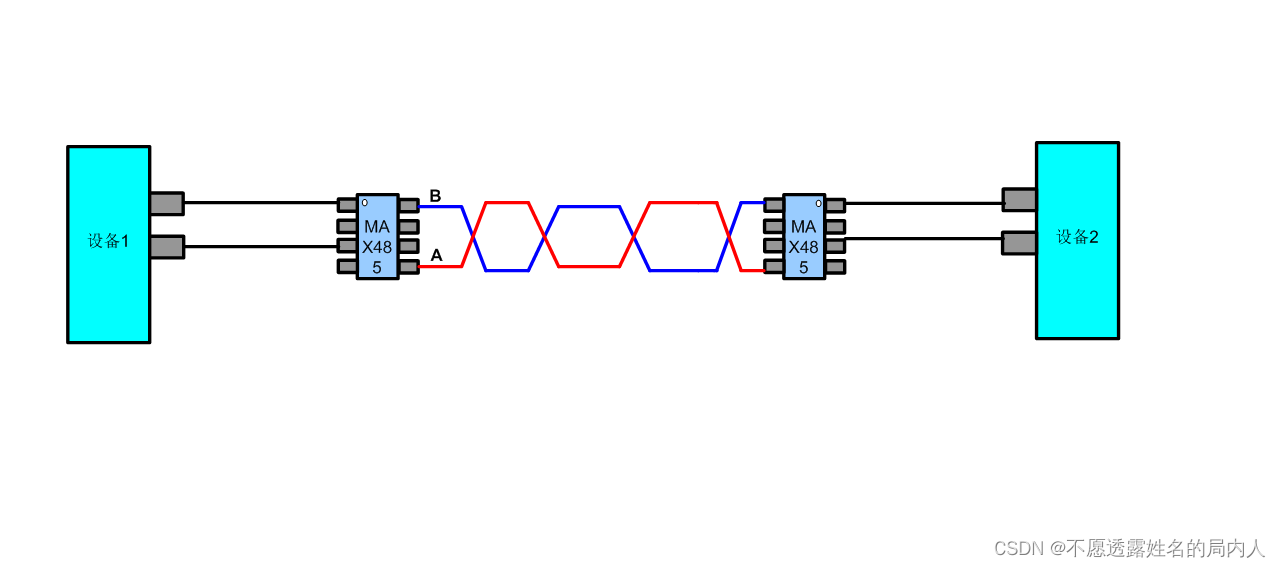
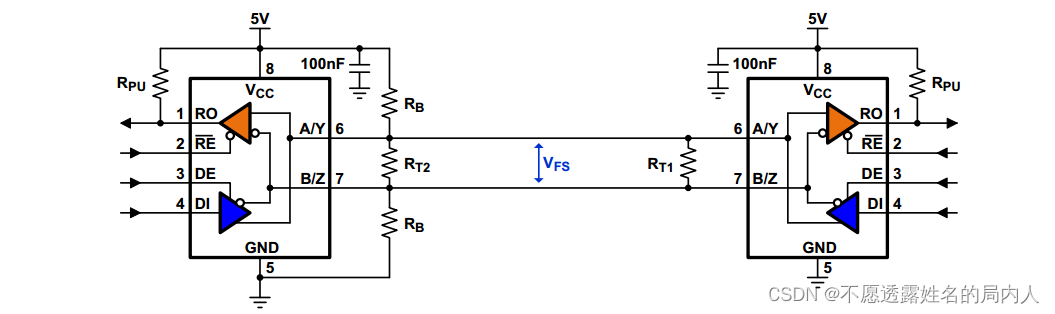
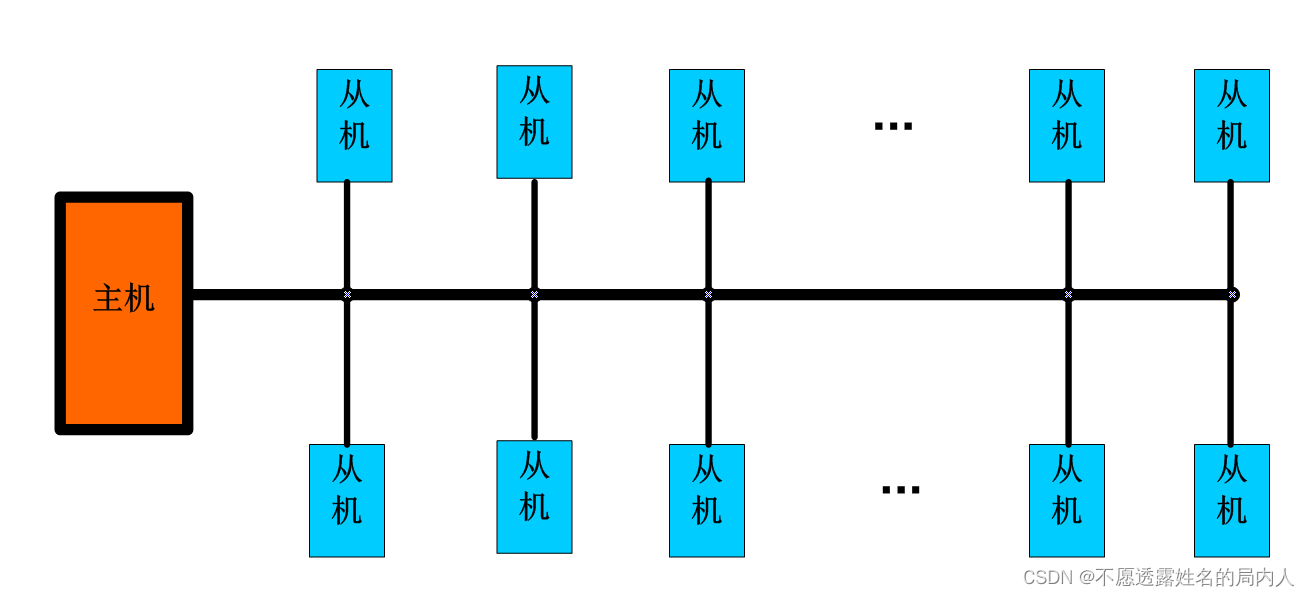
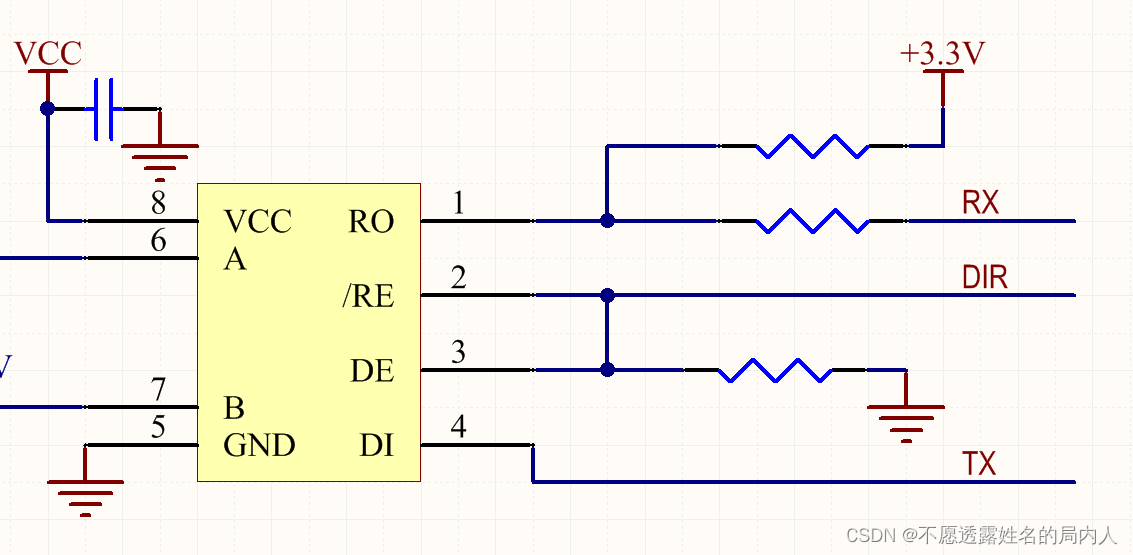
RS485采用差分信号,半双工。 逻辑"1”以两线间的电压差为+(2-6)V表示; 逻辑"0"以两线间的电压差为-(2~6)V表示 484芯片可以将TTL信号转化为差分信号。 传输模型如下:抗干扰能力强,传输距离更远 一主多从模式。
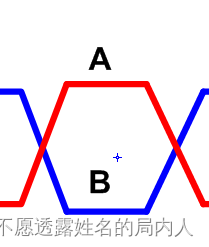
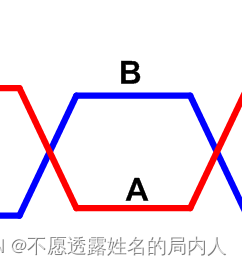
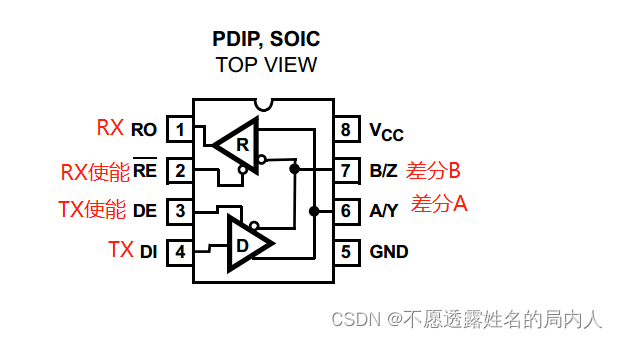
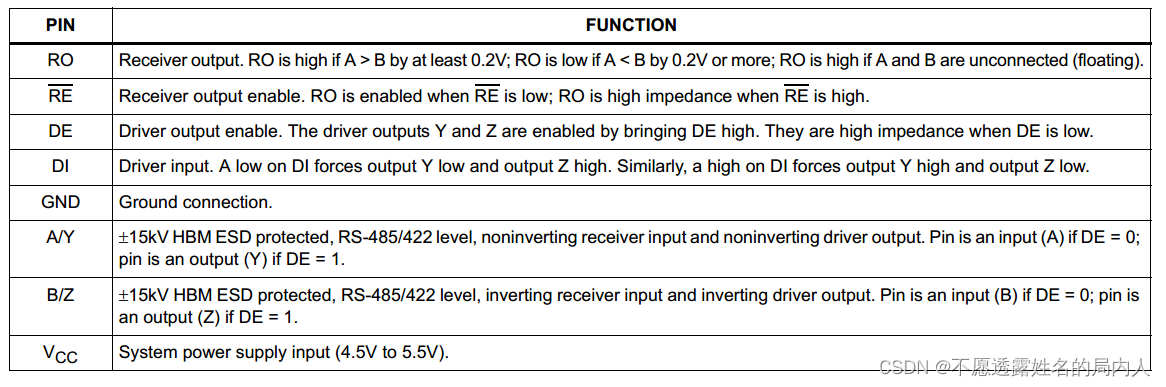
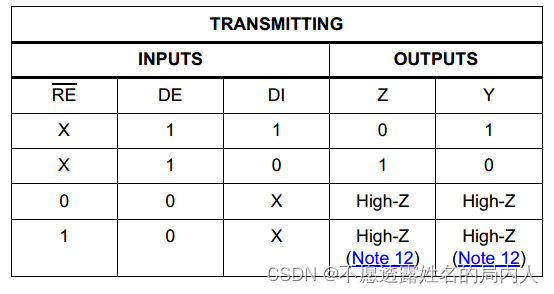
高电平:A>B 低电平:A<B 常用的485芯片有MAX485,SP485,ISL81487等,以ISL81487为例其管脚功能如下图所示 差分信号转成TTL电平,对差分信号A\B是有要求的。 发送: 接收: 常用电路: VCC为5V 注意输入输出逻辑电平范围




 抗干扰能力较UART增强,传输距离也比URAT更远
抗干扰能力较UART增强,传输距离也比URAT更远
 下图是使用CH340T实现USB转换RS232串行接口。CH340提供普通串口信号和MODEM信号,通过电平转换电路U8将TTL串口转换为RS232串口。端点P11为DB9针,该针及其功能与普通九针计算机串行接口相同。与U8类似的有MAX213/ADM213/SP213等
下图是使用CH340T实现USB转换RS232串行接口。CH340提供普通串口信号和MODEM信号,通过电平转换电路U8将TTL串口转换为RS232串口。端点P11为DB9针,该针及其功能与普通九针计算机串行接口相同。与U8类似的有MAX213/ADM213/SP213等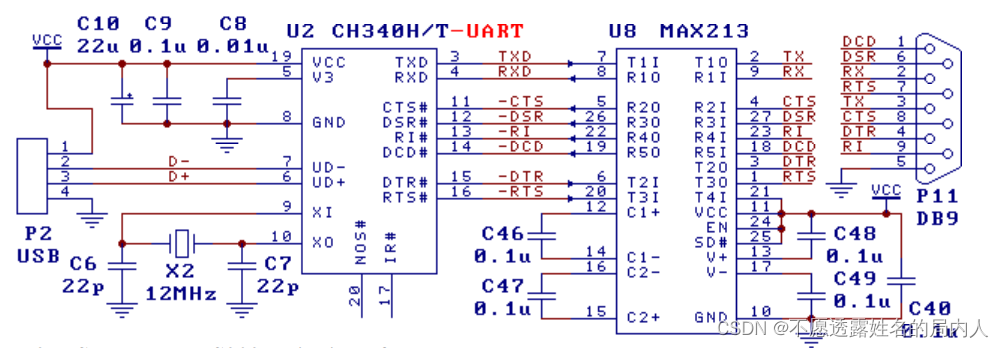
 下图也是USB转换的三个RS232串行接口,这个电路的功能与上图相同。只需添加二极管、三极管、电阻和电容即可替代上图中专用电平转换电路的U5 (MAX232),因此硬件成本较低。
下图也是USB转换的三个RS232串行接口,这个电路的功能与上图相同。只需添加二极管、三极管、电阻和电容即可替代上图中专用电平转换电路的U5 (MAX232),因此硬件成本较低。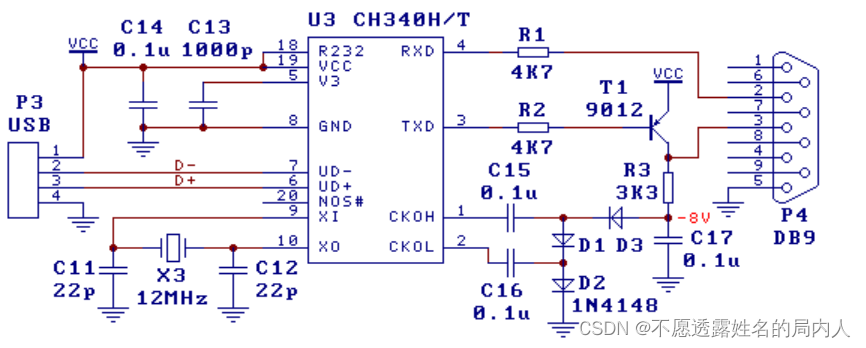 常用的USB转232线缆,如下图所示。
常用的USB转232线缆,如下图所示。

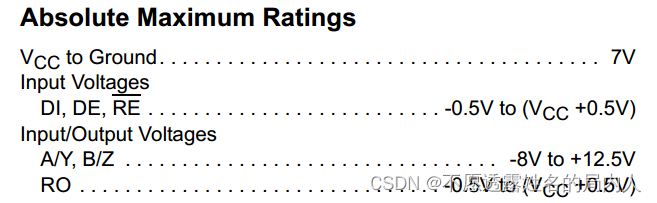
 注意输入输出逻辑电平范围
注意输入输出逻辑电平范围
