交互式多模型简单原理
交互式多模型 IMM(Interacting Multiple Model)控制算法的主体思想是基于贝叶斯理论而提出的模型间的自动识别与切换:在任意跟踪时刻,通过设置对应目标可能模型数量的模型滤波器来进行实时的机动模型检测,对每一个滤波器设置权重系数和模型更新的概率,最后加权计算得出当前最优估计状态,从而达到模型自适应跟踪的目的。
以下是 IMM 算法流程图
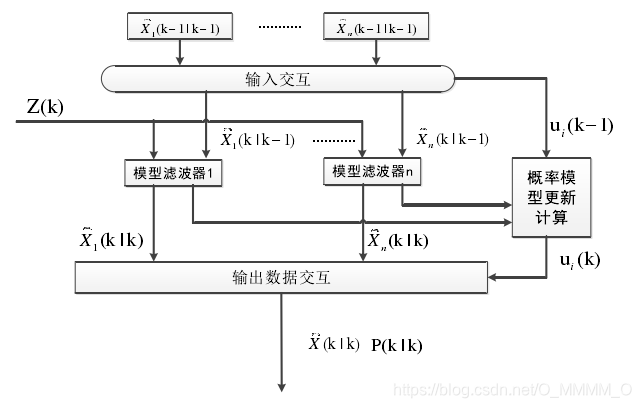
由图可以看出,一次交互式多模型跟踪的算法主要包含以下四个步骤即输入模型交互、滤波器的滤波、概率模型的更新和新的数据融合。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)