CAN总线调试过程中出现报文发送失败,很多工程师都对此只知其一不知其二,这里就CAN报文发送失败的问题我们来做一次探讨。
在了解CAN报文为什么会发送失败之前我们先看看一条正确的CAN报文到底应该是怎么样的,表1是一个正常标准数据帧的报文组成。
表 1 标准数据帧报文格式组成

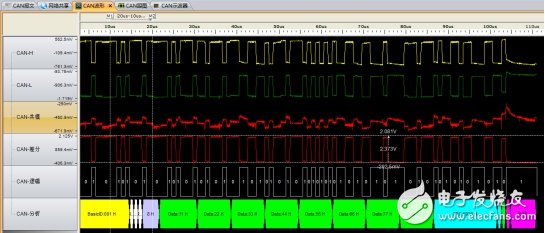
图 1 标准数据帧格式
CAN总线是一种基于广播的通讯方式,为了保证总线上的每一个正常节点都能正确的接收到报文,报文的发送者要求每一个接收节点在报文发送结束前要作出应答,这也是报文里ACK存在的原因。
一帧CAN报文中ACK段长度为2个位,包含应答间隙(ACK Slot)和应答界定符(ACK Delimter)。在应答场里,发送站发送两个隐性位。当接收器正确地接收到有效的报文,接收器就会在应答间隙(ACK Slot)期间(发送ACK信号)向发送器发送一“显性”的位以示应答。
应答间隙:所有接收到匹配CRC序列(CRC SEQUENCE)的站会在应答间隙(ACK Slot)期间用一显性的位写入发送器的隐性位来作出回答。
应答界定符:ACK界定符是ACK场的第二个位,并且是一个必须为隐性的位。因此,应答间隙(ACK Slot)被两个隐性的位所包围,也就是CRC界定符(CRC Delimter)和ACK界定符(ACK Delimter)。
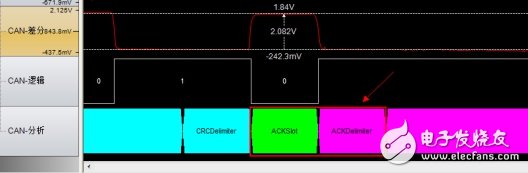
图 2 正常ACK段报文
而如果总线上没有ACK应答(即应答间隙为隐性),发送器就会发送一个错误标志,并且发送错误计数器值加8,节点就会对报文进行自动重发,若自动重发依然收不到ACK,则在发送错误计数器计数满128后(即出现16帧错误帧),由错误主动转为错误被动状态,如图3所示。
那导致ACK段出错的原因有哪些呢?
· 总线上只有一个有效节点:发送报文的节点在发送出一帧报文后会检测总线上应答间隙的状态,如果检测到应答间隙为隐性位,则表示该帧报文没有得到ACK,发送失败,需要重发,而由于发送错误计数器会在发送失败后累加,直到该节点关闭。所以,当总线上只有一个有效节点时,这个节点是发不出去数据的,因为它所发出的数据帧中的ACK Slot没有另外一个节点来填充,将永远是隐性位,这个节点会一直重发数据直到发送成功或发送被取消。
· 波特率不匹配或者节点没有初始化,导致没有ACK;
· 总线线缆短路,断路,接反;
· 高速CAN总线上接的节点不是高速CAN,而是容错低速CAN,导致不匹配。
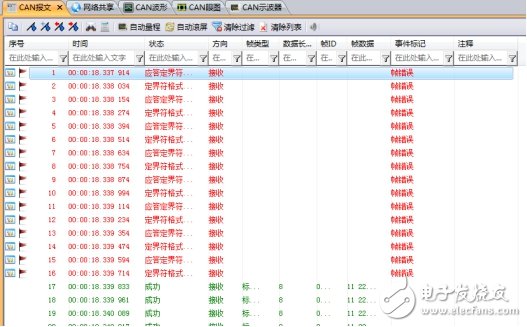
图 3 应答界定符错误帧
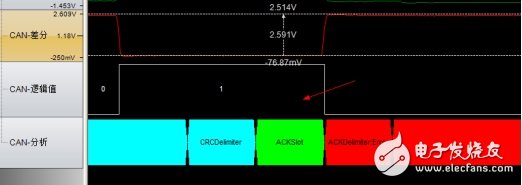
图 4 没有ACK的报文
当你在调试CAN总线时出现节点发送报文失败的情况时,一定要检查是不是以上几点疏漏导致你的总线上ACK异常。而借助恰当的仪器,可以在查找CAN总线错误时事半功倍。图4即采用致远电子的CANScope来对错误帧进行标记,同时找到错误帧对应的波形来查找出错误情况。CANScope还可以对CAN总线物理层、数据链路层、应用层做一系列的测试,为CAN工程师解决测试难题。
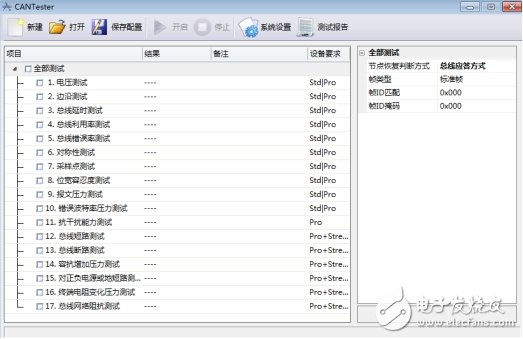
图 5 CANScope测试项目
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)