由于我在项目中将该芯片作为PHY和SERDES使用,因此本文内容主要还是围绕PHY和SERDES的相关功能,至于其他功能则没有进行深入研究。
工作模式
在之前的硬件篇中有提到,该芯片有两种寻址模式:单芯片寻址和多芯片寻址。
- 多芯片寻址
对于多芯片寻址,需要给芯片设置一个非零的SMI地址(ADDR[4:0]的反码)。在多芯片寻址模式下,仅有两个寄存器(0x00:SMI Command Register 0x01:SMI Data Register)能够使用,内部各PORT的寄存器均由这两个寄存器间接访问。

通过向SMI Command Register的[9:5]写入内部SMI设备地址,[4:0]写入内部SMI寄存器地址来访问各个Port的内部寄存器,[11:10]决定决前是写入还是读出操作。
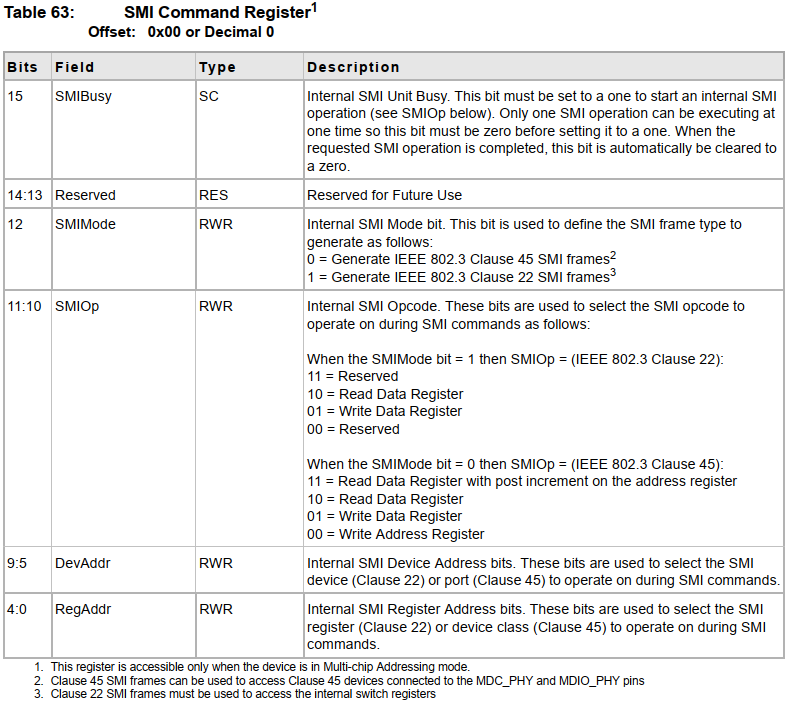
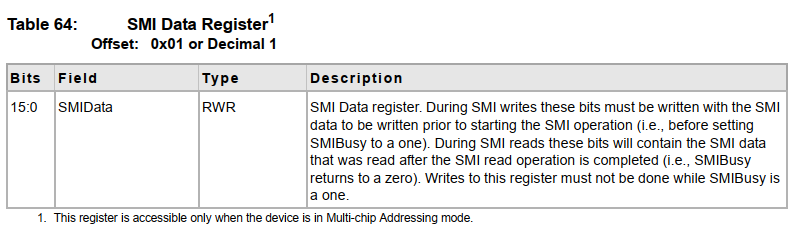
通过向SMI Data Register的[15:0]位写入或读取SMI Command Register设定的寄存器内容。
- 单芯片寻址
对于单芯片寻址,其SMI地址为0x00(针对整个芯片),即ADDR[4:0]=0x1F。
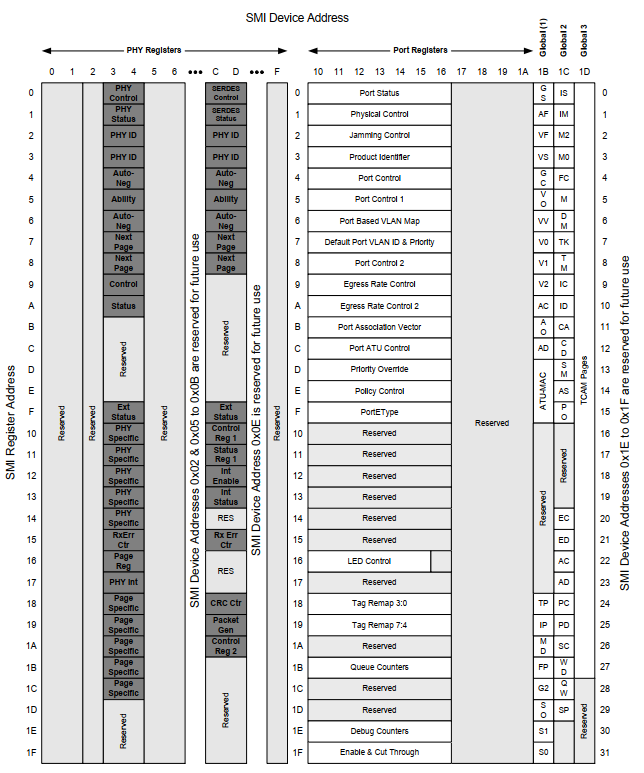
在单芯片寻址模式下,每个Port都有各自的SMI地址(针对内部每个Port),Port0-Port6对应的SMI地址分别为0x10-0x16(直接访问)。
若Port0、1、2、5、6接有外部PHY,则必须使用以下SMI地址,0x00对应Port0,0x01对应Port1,0x02对应Port2,0x05对应Port5,0x06对应Port6,这样PPU才能自动的轮询各个PHY获取各自的连接状况,速度,双工情况,流控状态等信息,这些外部PHY需要使用Global2 offset 0x18、0x19进行访问。对于Port3、Port4的内部PHY地址映射为0x03、0x04;Port0、Port1的内部SERDES映射为0x0C、0x0D,同样的,也是需要使用Global2 offset 0x18、0x19进行访问。
Global2 寄存器的 Offset24,25 寄存器
前文提到,两个非常重要的寄存器,即Global2 offset 0x18、0x19寄存器,在单芯片寻址模式下PHY和SERDES寄存器的访问都必须通过这两个寄存器间接访问。
- Global2 offset 0x18 (SMI PHY Command Register)寄存器
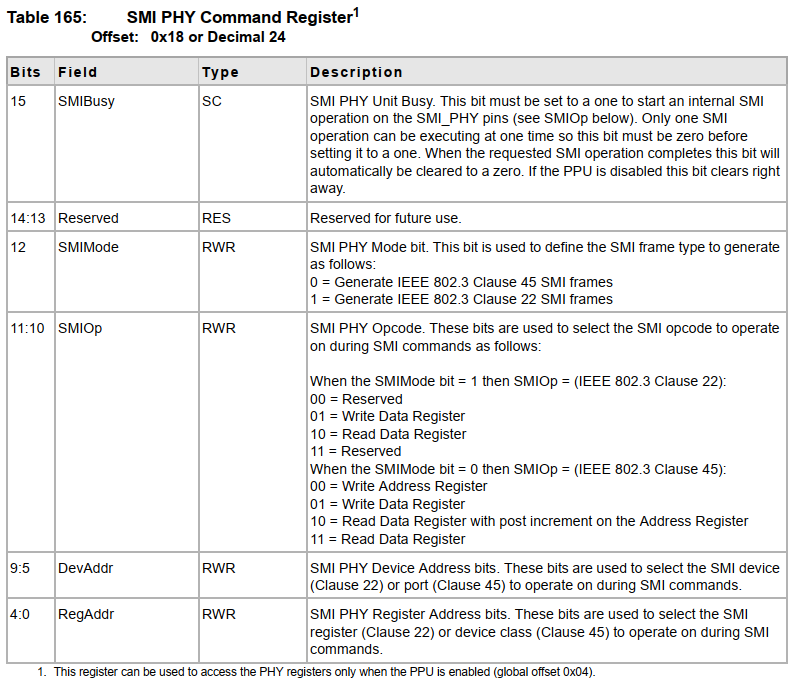
与多芯片存储能够访问的Command Register寄存器一样,[9:5]写入SMI设备地址,[4:0]写入SMI寄存器地址来访问各个Port的内部寄存器,[11:10]决定当前是写入还是读出操作。
- Global2 offset 0x19 (SMI PHY Data Register)寄存器
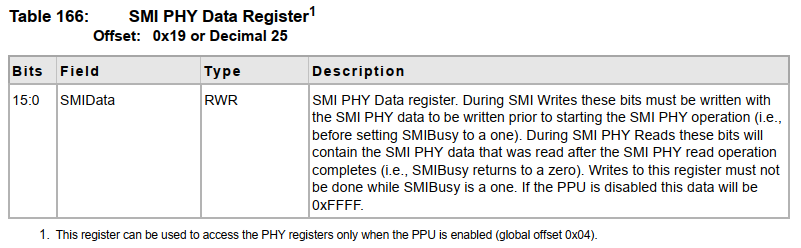
与SMI Data Register相同,通过[15:0]位写入或读取SMI Command Register设定的寄存器内容。
- PHY读写函数(伪代码)
对于单纯的PHY器件,如LAN8720A,我们对于PHY寄存器的访问(按照Clauses 22)直接通过SMI接口设置phy地址,和内部寄存器地址就可以访问了。
| Preamble(32bits) | Start(2bits) | OP Code(2bits) | PHYAD(5bits) | REGAD(5bits) | Turn Around(2bits) | Data(16bits) | Idle |
|---|
| Read | 1…1 | 01 | 10 | A4A3A2A1A0 | R4R3R2R1R0 | Z0 | D15…D0 | Z* |
| Write | 1…1 | 01 | 01 | A4A3A2A1A0 | R4R3R2R1R0 | Z0 | D15…D0 | Z* |
而这里,对于88E6321的访问就不那么直接了,下面通过伪代码形式讲述如何正确读写内部PHY寄存器:
首先必须实现最直接的SMI读写函数,不同的平台实现方式可能不同,在STM32的HAL库下,提供了
HAL_StatusTypeDef HAL_ETH_WritePHYRegister(ETH_HandleTypeDef *heth, uint16_t PHYReg, uint32_t RegValue)
HAL_StatusTypeDef HAL_ETH_ReadPHYRegister(ETH_HandleTypeDef *heth, uint16_t PHYReg, uint32_t RegValue)
但是这个函数的PhyAddress是由heth带入的,而我们要频繁在各个Port与Global寄存器间切换,因此改写该库函数,PhyAddress主动传入。
HAL_StatusTypeDef HAL_ETH_WritePHYRegister_New(ETH_HandleTypeDef *heth, uint16_t DevAddr, uint16_t PHYReg, uint32_t *RegValue)
HAL_StatusTypeDef HAL_ETH_ReadPHYRegister_New(ETH_HandleTypeDef *heth, uint16_t DevAddr, uint16_t PHYReg, uint32_t *RegValue)
有了最基础读写的函数,我们来构建内部PHY读写函数:
error_code_t write_smi_phy_reg(ETH_HandleTypeDef *heth, uint16_t dev_addr, uint16_t reg_addr, uint32_t reg_value)
{
volatile uint16_t time_out;
uint32_t smi_reg;
time_out = 100;
do {
if (HAL_ETH_ReadPHYRegister_New(heth, GLOBAL2_DEV_ADDR(0x1C), SMI_PHY_CMD_REG(0x18), &smi_reg) != ok) {
ERROR_MSG("Read SMI_PHY_CMD_REG register failed");
return error;
}
if (time_out-- < 1) {
ERROR_MSG("Read SMI_PHY_CMD_REG register timed out");
return error;
}
} while (smi_reg & SMI_BUSY(0x8000));
if (HAL_ETH_WritePHYRegister_New(heth, GLOBAL2_DEV_ADDR, SMI_PHY_DATA_REG, reg_value) != ok) {
return error;
}
smi_reg = SMI_BUSY | (dev_addr << 5) | (SMI_WRITE(0x01) << 10) | (reg_addr << 0) | (SMI_CLAUSE22 << 12);
if (HAL_ETH_WritePHYRegister_New(heth, GLOBAL2_DEV_ADDR, SMI_PHY_CMD_REG, smi_reg) != ok) {
ERROR_MSG("Write PHY_QD_REG_SMI_PHY_CMD Register Failed");
return error;
}
return ok;
}
error_code_t read_smi_phy_reg(ETH_HandleTypeDef *heth, uint16_t dev_addr, uint16_t reg_addr, uint32_t reg_value)
{
volatile uint16_t time_out;
uint32_t smi_reg;
time_out =100;
do {
if (HAL_ETH_ReadPHYRegister_New(heth, GLOBAL2_DEV_ADDR(0x1C), SMI_PHY_CMD_REG(0x18), &smi_reg) != ok) {
ERROR_MSG("Read SMI_PHY_CMD_REG register failed");
return error;
}
if (time_out-- < 1) {
ERROR_MSG("Read SMI_PHY_CMD_REG register timed out");
return error;
}
} while (smi_reg & SMI_BUSY(0x8000));
smi_reg = SMI_BUSY | (dev_addr << 5) | (SMI_READ_22(0x02) << 10) | (reg_addr << 0) | (SMI_CLAUSE22 << 12);
if (HAL_ETH_WritePHYRegister_New(heth, GLOBAL2_DEV_ADDR, SMI_PHY_CMD_REG, smi_reg) != ok) {
ERROR_MSG("Write PHY_QD_REG_SMI_PHY_CMD Register Failed");
return error;
}
time_out =100;
do {
if (HAL_ETH_ReadPHYRegister_New(heth, GLOBAL2_DEV_ADDR(0x1C), SMI_PHY_CMD_REG(0x18), &smi_reg) != ok) {
ERROR_MSG("Read SMI_PHY_CMD_REG register failed");
return error;
}
if (time_out-- < 1) {
ERROR_MSG("Read SMI_PHY_CMD_REG register timed out");
return error;
}
} while (smi_reg & SMI_BUSY(0x8000));
if (HAL_ETH_WritePHYRegister_New(heth, GLOBAL2_DEV_ADDR, SMI_PHY_DATA_REG, reg_value) != ok) {
return error;
}
*reg_value = smi_reg;
return ok;
}
从以上伪代码可以看出:写入PHY时,先写入数据,在写入命令。读取PHY时,先写入命令,等待数据准备完成,再读取数据。
PHY寄存器
实现了PHY的读写函数后,再来看看有那些寄存器可以访问。
IEEE中只为PHY定义了32个寄存器地址,为了拓展寄存器地址,这里采用的页机制,其中寄存器22的[7:0]用于切换页。
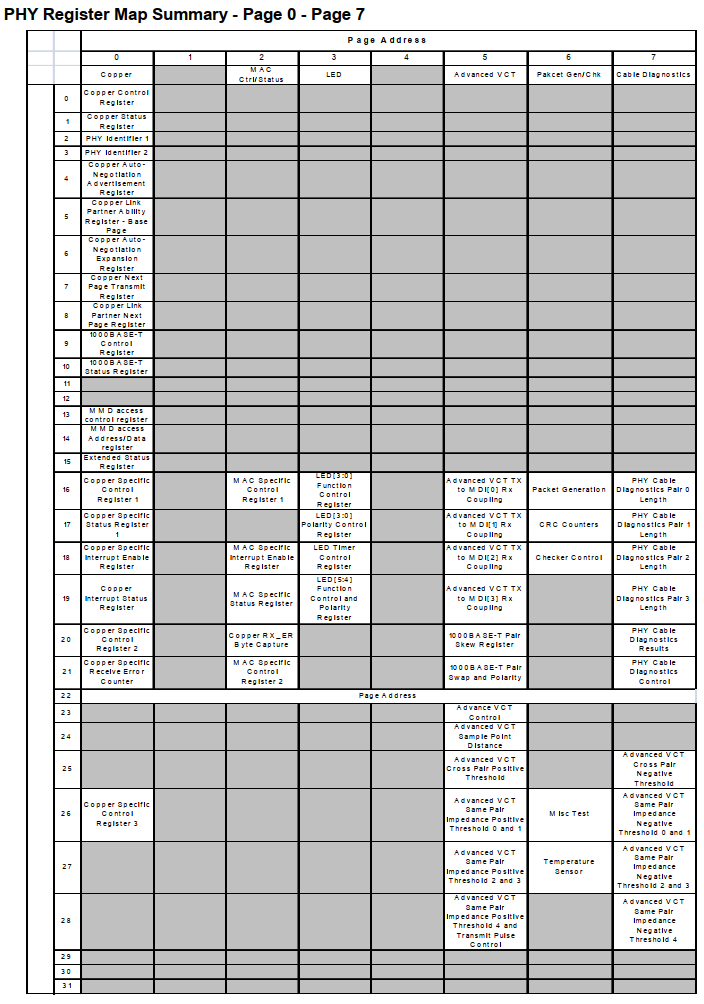
这里介绍几个主要的寄存器:
-
Page 0, Register 0 Copper Control Register
寄存器0是PHY控制寄存器,通过Control Register可以对PHY的主要工作状态进行设置,具体内容可以查询datasheet,下面介绍主要的功能:
bit15 Copper Reset: 软复位功能,对其写“1”触发软复位,并在复位结束后自动清为“0”,在某些操作(如修改自协商模式)后需要软复位才能使其生效。
bit14 Loopback: lookback测试功能,用于开发调试,写一使能该功能。
bit12 Auto-Negotiation Enable: 自动协商使能位,软件复位后生效,具体的Auto-Negotiation选项设置,在Copper Auto-Negotiation Advertisement Register (Page 0, Register 4)配置。
-
Page 0, Register 1 Copper Status Register
寄存器1是PHY状态寄存器,主要包含PHY的状态信息,如速率、双工情况、自协商是否完成、自协商能力等。
bit5 Copper Auto-Negotiation Complete: 自动协商完成位,此时PHY的其他寄存器才是可靠的。
bit2 Copper Link Status: Link状态指示位Link状态指示位,PHY Polling通过轮询该位来确定Link状态,该位只在Auto-Negotiation Complete完成后才可靠。
(FBI WARINIG下,这里的链路状态每次读取会得到上一次的链路状态,也就是这里的链路状态是滞后的,因此,想要获得最新状态,建议连续读取两次,或者直接读取寄存器17的bit10,获取实时状态。)
-
Page 0, Register 4 Copper Auto-Negotiation Advertisement Register
寄存器4是指示自动协商所支持的能力的寄存器,在AN enable的情况下,该端口会使用快速连接脉冲(Fast Link Pulse FLP)与对端交互端口自协商能力,协商完成后,会选择双方均支持的能力建立连接。
bit9-bit5 分别指示能够支持的能力。
-
Page 0, Register 5 Copper Link Partner Ability Register
寄存器5用于指示自动协商后,对端的所支持的自协商能力,该寄存器在调试时非常有用,能够表明,链路上是否有数据交互。
-
Page 0, Register 9 1000BASE-T Control Register
寄存器9用于设置1000BASE-T的主从配置与自协商能力。需要注意的是,1000BASE-X的自协商除了双工和流控信息之外,并不能协商速率信息,也就是说端口只能工作在1000M模式下。
-
Page 0, Register 10 1000BASE-T Status Register
寄存器10主要用于保存自协商完成后的对端所支持的自协商能力。
-
Page 0, Register 16 Copper Specific Control Register 1
寄存器16主要是寄存器0的拓展。
bit10 强制设置网络已经连接功能 在我们进行lookback测试,而网线又不能接入时,可以强制使寄存器link up,而方便测试进行。
bit6:5 MDI交差模式,一般来说设置为11b,PHY根据FLP信号自动切换为MDI或者MDIX,因此该功能需要自协商功能的支持。
-
Page 0, Register 17 Copper Specific Status Register 1
寄存器17是主要是寄存器1的拓展,在这个寄存器中,我们可以获取到当前的连接状态,当前MDI Crossover的模式等。
-
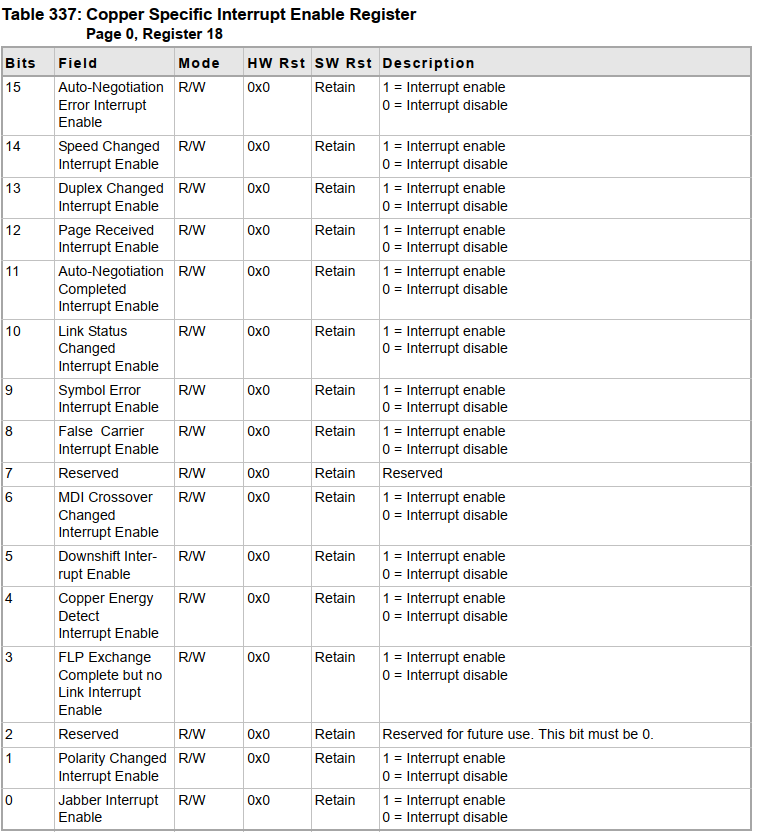
Page 0, Register 18 Copper Specific Interrupt Enable Register
寄存器18,顾名思义,就是中断使能寄存器。初始化时配置了相关中断使能后,一旦中断发生,INT0引脚则会拉低,此时MCU通过读取Register 19,则可以确定发生了什么中断。
-
Page 0, Register 19 Copper Interrupt Status Register
寄存器19为中断状态寄存器,读取该寄存器将清除中断。
-
Page ANY, Register 22 Page Address
bit7:0 页选择寄存器 用于在各个寄存器中进行页切换。
了解了以上主要寄存器,下面来实现具备页切换的PHY读写函数:
error_code_t read_smi_page_phy_reg(ETH_HandleTypeDef *heth, uint8_t port_num, uint8_t page_num, uint16_t reg_addr, uint32_t *reg_value)
{
error_code_t ret_value;
ret_value = write_smi_phy_reg(heth, (uint16_t)port_num, SMI_PHY_PAGE_ANY_REG(0x16), (uint32_t)page_num);
if (ret_value != ok)
return ret_value;
ret_value = read_smi_phy_reg(heth, (uint16_t)port_num, reg_addr, reg_value);
return ret_value;
}
error_code_t read_smi_page_phy_reg(ETH_HandleTypeDef *heth, uint8_t port_num, uint8_t page_num, uint16_t reg_addr, uint32_t reg_value)
{
error_code_t ret_value;
ret_value = write_smi_phy_reg(heth, (uint16_t)port_num,SMI_PHY_PAGE_ANY_REG(0x16), (uint32_t)page_num);
if (ret_value != ok)
return ret_value;
ret_value = write_smi_phy_reg(heth, (uint16_t)port_num, reg_addr, reg_value);
return ret_value;
}
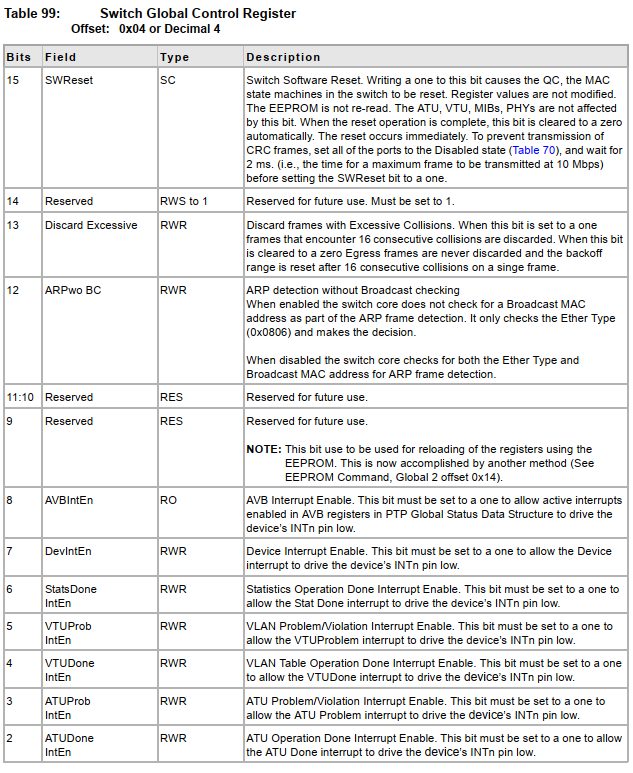
中断相关寄存器
88E632x包含了一个中断控制器,将各种中断统一合并到一个引脚INTn上。全局寄存器1 offset 0x04中包含了各种中断源的总开关,为了能够使用设备相关中断,我们需要将bit7 DevIntEn置为1 。
接着,还需要设置中断掩码(Global2 Offset1),确保PHY相关中断使能。
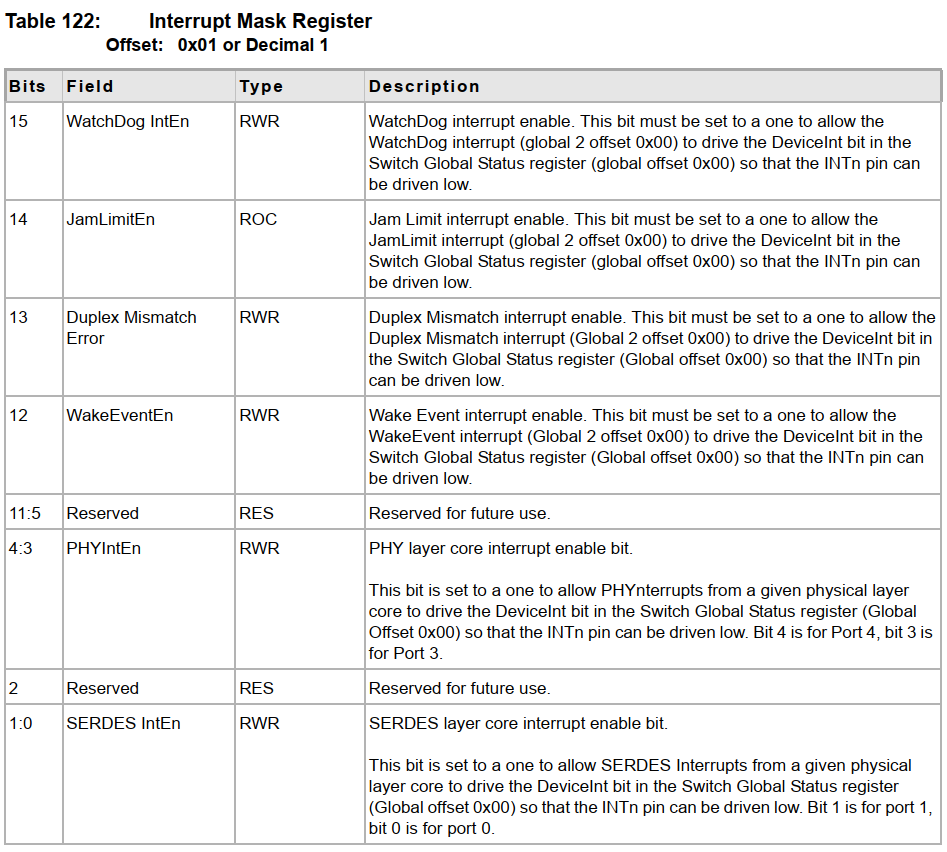
最后还需要设置PHY寄存器(0x12),使能具体使用哪些中断。
完成以上操作后,一旦相关中断发生,这会拉低88E632x的INTn引脚,MCU则可以通过下降沿触发中断,对芯片具体发生什么中断进行判断与处理。
需要注意的是,在中断发生后,如果没有对该中断进行处理,则该INTn引脚会一直处于低电平,这样就无法再次捕获相关中断了,因此,中断发生后应及时清除中断,清除中断需要读取2个寄存器,Global1 Offset 0 Switch Global Status Register 寄存器和PHY 19 Copper Interrupt Status Register寄存器。
SERDES寄存器
SERDES寄存器的配置与PHY基本相同,这里不再赘述,不过需要注意的是,光纤相关的自协商只能协商双工和流控等信息,而速率则是固定的,因此协商前需要确定通信速率。
在switch芯片的Px_SMODE可以决定是千兆还是百兆光纤。
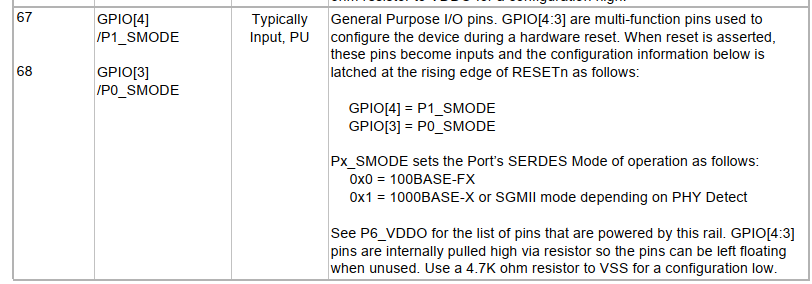
通过读取 Fiber Specific Control Register 1的bit1:0可以知道其当前工作模式。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)