UART代表通用异步接收器/发送器也称为串口通讯,它不像SPI和I2C这样的通信协议,而是微控制器中的物理电路或独立的IC。UART的主要目的是发送和接收串行数据,其最好的优点是它仅使用两条线在设备之间传输数据。UART的原理很容易理解,但是如果您还没有阅读SPI 通讯协议,那可能是一个不错的起点。

UART通信

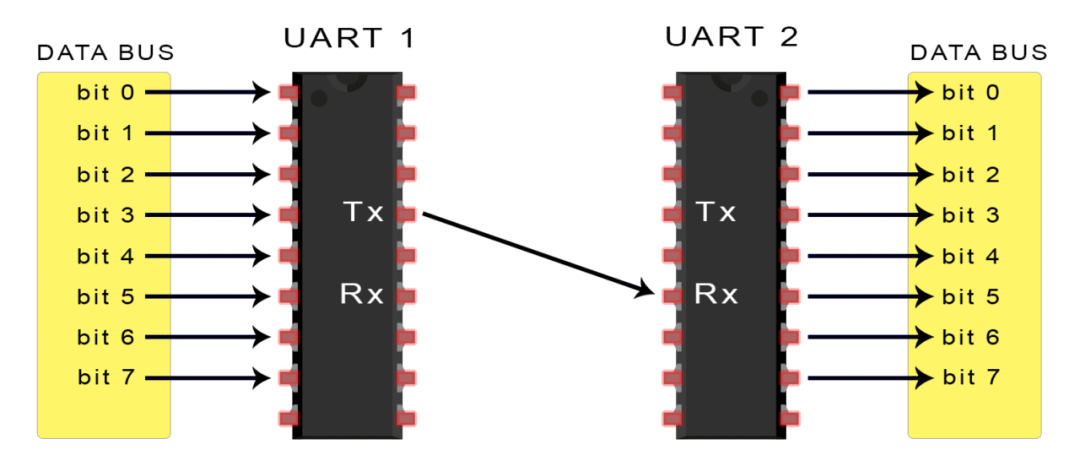
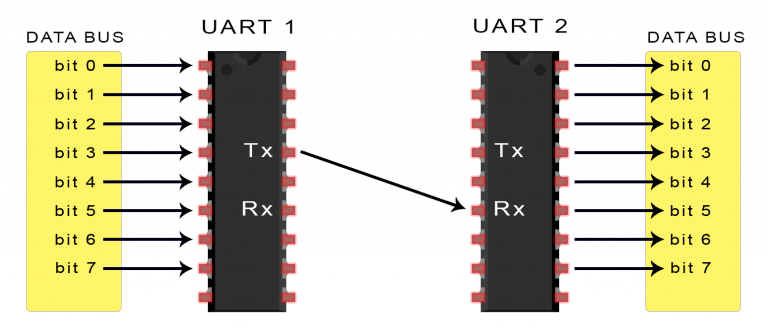
在UART通信中,两个UART直接相互通信。 发送UART将控制设备(如CPU)的并行数据转换为串行形式,以串行方式将其发送到接收UART。只需要两条线即可在两个UART之间传输数据,数据从发送UART的Tx引脚流到接收UART的Rx引脚:
UART属于异步通讯,这意味着没有时钟信号,取而代之的是在数据包中添加开始和停止位。这些位定义了数据包的开始和结束,因此接收UART知道何时读取这些数据。
当接收UART检测到起始位时,它将以特定波特率的频率读取。波特率是数据传输速度的度量,以每秒比特数(bps)表示。两个UART必须以大约相同的波特率工作,发送和接收UART之间的波特率只能相差约10%。

工作原理
发送UART从数据总线获取并行数据后,它会添加一个起始位,一个奇偶校验位和一个停止位来组成数据包并从Tx引脚上逐位串行输出,接收UART在其Rx引脚上逐位读取数据包。
UART数据包含有1个起始位,5至9个数据位(取决于UART),一个可选的奇偶校验位以及1个或2个停止位:

起始位
UART数据传输线通常在不传输数据时保持在高电压电平。开始传输时发送UART在一个时钟周期内将传输线从高电平拉低到低电平,当接收UART检测到高电压到低电压转换时,它开始以波特率的频率读取数据帧中的位。
数据帧
数据帧内包含正在传输的实际数据。如果使用奇偶校验位,则可以是5位,最多8位。如果不使用奇偶校验位,则数据帧的长度可以为9位。
校验位
奇偶校验位是接收UART判断传输期间是否有任何数据更改的方式。接收UART读取数据帧后,它将对值为1的位数进行计数,并检查总数是偶数还是奇数,是否与数据相匹配。
停止位
为了向数据包的结尾发出信号,发送UART将数据传输线从低电压驱动到高电压至少持续两位时间。
传输步骤
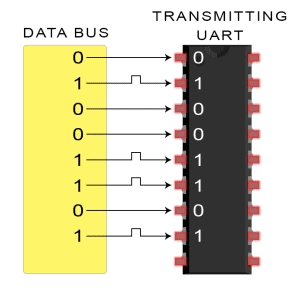
1.发送UART从数据总线并行接收数据:
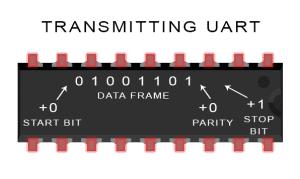
2.发送UART将起始位,奇偶校验位和停止位添加到数据帧:
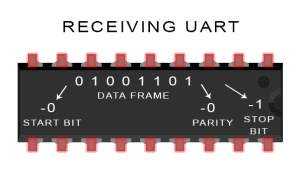
3.整个数据包从发送UART串行发送到接收UART。接收UART以预先配置的波特率对数据线进行采样:

4.接收UART丢弃数据帧中的起始位,奇偶校验位和停止位:
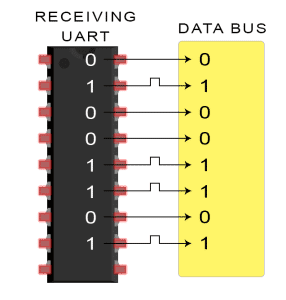
5.接收UART将串行数据转换回并行数据,并将其传输到接收端的数据总线:
优劣
没有任何通信协议是完美的,但是UART非常擅长于其工作。以下是一些利弊,可帮助您确定它们是否适合您的项目需求:
优点
-
仅使用两根电线
-
无需时钟信号
-
具有奇偶校验位以允许进行错误检查
-
只要双方都设置好数据包的结构
-
有据可查并得到广泛使用的方法
缺点
-
数据帧的大小最大为9位
-
不支持多个从属系统或多个主系统
-
每个UART的波特率必须在彼此的10%之内
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)