TX2开箱
一共6样,开机之后自带ubuntu16.04LTS的系统,ARMv8的处理器,所以有些指令,安装包必须与arm结构保持一致。
开机之后,按照指示进入图形界面:
Step 1)
nvidia@tegra-ubuntu:~$ cd /home/nvidia/NVIDIA-INSTALLER
Step 2)
nvidia@tegra-ubuntu:~/NVIDIA-INSTALLER$ sudo ./installer.sh
Step 3)
nvidia@tegra-ubuntu:~/NVIDIA-INSTALLER$ reboot
注意:
-installer.sh 只能运行一次。
TX2刷机之JetPack3.2.1
刷机步骤可参考网络
这里安装JetPack3.2.1,因为librealsense2.0 要对应L4T 28.2.1(JetPack3.2.1),所以 下载 JetPack-L4T-3.2.1-linux-x64_b23.run
下载地址:https://developer.nvidia.com/embedded/jetpack-archive
准备一台ubuntu电脑作为主机,不能是虚拟机。打开TX2,主机与TX2连接同一个wifi即可,这里,记下TX2的IP地址,之后就可以把TX2放一边,或者关机断电了。
首先更改执行权限:
$ chmod +x ./JetPack-L4T-3.3-linux-x64_b39.run
在终端直接运行就可以打开安装界面
./JetPack-L4T-3.3-linux-x64_b39.run
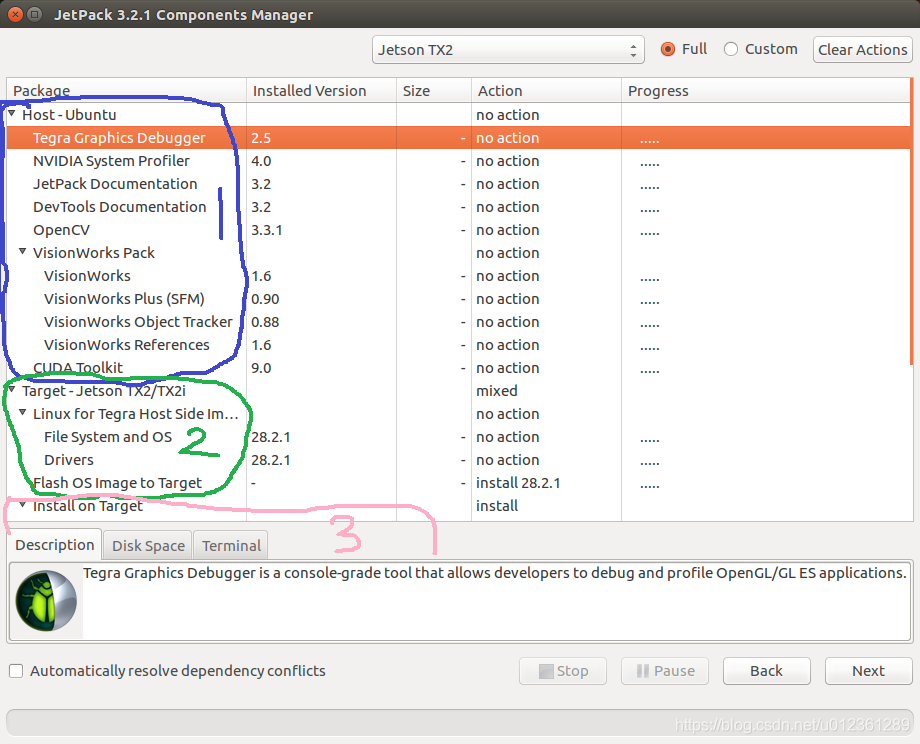
到这一步时,分三个部分安装,可以分成三步走,也就是运行三遍./JetPack-L4T-3.3-linux-x64_b39.run
运行第一遍,安装第一部分,第一部分选择‘install’安装到主机上。其余的选择‘no action’ 漫长的下载与安装。。。。。。
运行第二遍,安装第二部分,第二部分选择‘install’,其余部分选择‘no action’,这一部分最后会跳出一个post installtion 的黑色对话框,要求把tx2设置 为‘nvidia corp’模式
此时,
- 用Micro USB数据线(也就是我们第一节所写的开箱图中的标号为3的线)连接PC和TX2。(注意:数据线接到TX2的Micro USB接口J20)
- 给tx2上电,按下power键
- 按下并松开TX2的POWER键S4;按下并保持FORCE RECOVERY键S3;在此期间按下并松开RESET键S1;等待2秒后松开FORCE RECOVERY键S3。
之后在主机输入
$ lsusb
出现nvidia corp,然后在post installtion 的黑色对话框按任意键继续........................
运行第三遍,安装第三部分,第三部分选择‘install’,其余设置为‘no action’,中间输入TX2的IP地址用户名密码,就可以通过wifi安装cuda,opencv等库了,
可以跑下刷机后自带的例子
cd ~
cd NVIDIA_CUDA-9.0_Samples/bin/aarch64/linux/release/
./oceanFFT
cd ~
cd tegra_multimedia_api/samples/backend
./backend 1 ../../data/Video/sample_outdoor_car_1080p_10fps.h264 H264 --trt-deployfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.prototxt --trt-modelfile ../../data/Model/GoogleNet_one_class/GoogleNet_modified_oneClass_halfHD.caffemodel --trt-forcefp32 0 --trt-proc-interval 1 -fps 10
opencv3.3.1手动编译
由于JetPack安装的opencv是默认python2的,网上一条命令的事,sudo python3.5 -m pip install opencv-python,or sudo pip3 install opencv-python
不知道为什么到这里就不行了
可能因为arm架构把,这里只能手动编译opencv了
jetpack安装的pip也是python2的,先升级下pip
sudo apt-get install --reinstall python3-pip
pip3 -V 应该会报错,报错后修改 /usr/bin/pip3 文件
from pip import __main__
if __name__ == '__main__':
sys.exit(__main__._main())
好了,开始安装opencv了
#uninstall opencv:不用卸也可以,python2可以正常import cv2
sudo apt-get purge libopencv*
sudo apt-get autoremove
sudo apt-get update
#install opencv:
sudo apt-get install build-essential cmake pkg-config
sudo apt-get install libjpeg8-dev libtiff5-dev libjasper-dev libpng12-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libxvidcore-dev libx264-dev
sudo apt-get install libgtk-3-dev
sudo apt-get install libatlas-base-dev gfortran
sudo apt-get install python3.5-dev
sudo apt-get install python3-numpy
cd ~/opencv-3.3.0/
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D PYTHON3_EXECUTABLE=/usr/bin/python3 \
-D PYTHON_INCLUDE_DIR=/usr/include/python3.5 \
-D PYTHON_INCLUDE_DIR2=/usr/include/aarch64-linux-gnu/python3.5m \
-D PYTHON_LIBRARY=/usr/lib/aarch64-linux-gnu/libpython3.5m.so \
-D PYTHON3_NUMPY_INCLUDE_DIRS=/usr/local/lib/python3.5/dist-packages/numpy/core/include/ ..
make -j6
sudo make install
caffe安装
从一个深坑到另一个更深的坑................
首先安装各种依赖:(注:一些python库,skimage,protobuf,numpy,scipy都要装python3版本的,不然后面import的时候还是找不到)
# general dependency
sudo apt-get install libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
# BLAS dependency
sudo apt-get install libatlas-base-dev
# python dependency
sudo apt-get install python (optional)
sudo apt-get install python-dev
# python dependency etc.
sudo apt-get install ipython (optional)
sudo apt-get install ipython-notebook (optional)
sudo apt-get install python3-sklearn or sudo pip3 install sklearn
sudo apt-get install python3-skimage or sudo pip3 install skimage
sudo pip3 install scikit-image(可以先不装,很慢,如果后面import caffe报错再回来装)
sudo pip3 install numpy
sudo pip3 install protobuf
# google dependency
sudo apt-get install libgflags-dev libgoogle-glog-dev liblmdb-dev
sudo apt-get install libgflag-dev
sudo apt-get install -y libopencv-dev (optional)
这是目前总结的包,如有error,请自行搜索。
开始下载安装编译
git clone https://github.com/weiliu89/caffe.git
cd caffe
git checkout ssd
cp Makefile.config.example Makefile.config
(you'd better update the cudnn.hpp,(Location: include/caffe/util/cudnn.hpp)
download this file from:
https://github.com/BVLC/caffe/blob/master/include/caffe/util/cudnn.hpp
)
make -j8
make py
make test -j8
#可选
make runtest -j8
编译完成后,添加pathonpath
sudo vim ~/.bsahrc
export PYTHONPATH=~/caffe/python:$PYTHONPATH
source ~/.bashrc
验证caffe是否安装好
python3
import caffe
caffe编译过程中错误记录:
错误:
when make all cannot find -lboost_python3
modificate makefile.config line 74
解决方案:
PYTHON_LIBRARIES := boost_python-py35 python3.5m (viki的配置文件已修改)
错误:
CXX src/caffe/solver.cpp
AR -o .build_release/lib/libcaffe.a
LD -o .build_release/lib/libcaffe.so.1.0.0-rc3
/usr/bin/ld: cannot find -lhdf5_hl
/usr/bin/ld: cannot find -lhdf5
collect2: error: ld returned 1 exit status
Makefile:566: recipe for target '.build_release/lib/libcaffe.so.1.0.0-rc3' failed
make: *** [.build_release/lib/libcaffe.so.1.0.0-rc3] Error 1
解决方案:
然后修改Makefile 文件(注意不是)Makefile.config
将里面的
LIBRARIES += glog gflags protobuf boost_system boost_filesystem m hdf5_hl hdf5
改为LIBRARIES += glog gflags protobuf boost_system boost_filesystem m hdf5_serial_hl hdf5_serial
错误:
numpy.core.multiarray failed to import
解决方案:
sudo pip3 install -U numpy
错误:
NO MODULE NAMED 'SCIPY._LIB.DECORATOR
解决方案:
sudo pip3 install scipy --ignore-installed scipy
sudo pip3 install -U scipy
错误:
ImportError: No module named 'google'
解决方案:
sudo pip3 install protobuf
错误:
ImportError: No module named 'skimage'
解决方案:
pip3 install scikit-image(下载超级慢,建议改下载源) 如果不换源,直接执行这句命令,那只能等了,慢到怀疑人生,一天都不一定装的好。
另一种方法,可以参考官方文档,网址:https://scikit-image.org/docs/stable/install.html
使用开发包安装 git clone https://github.com/scikit-image/scikit-image.git
cd scikit-image
pip install -e .
这种方法待验证,我也是装了很久才发现这个github的,~衰~
错误:
TypeError: __init__() got an unexpected keyword argument 'syntax'
解决方案:
protobuf版本不对,
pip install --upgrade protobuf
错误:
Check failed: *ptr host allocation of size 368640000 failed
解决方案:
内存不够,把batch_size改小
错误:
Check failed: status == CUBLAS_STATUS_SUCCESS (13 vs. 0) CUBLAS_STATUS_EXECUTION_FAILED
解决方案:
GPU驱动或CUDA版本安装不兼容
错误:
ImportError: /lib/x86_64-linux-gnu/libz.so.1: version `ZLIB_1.2.9' not found
解决方案
tar -xvf ~/Downloads/zlib-1.2.9.tar.gz
cd zlib-1.2.9
sudo -s
./configure; make; make install
cd /lib/x86_64-linux-gnu
ln -s -f /usr/local/lib/libz.so.1.2.9/lib libz.so.1
cd ~
rm -rf zlib-1.2.9
realsense安装
对应版本信息:
librealsense now has native CUDA support (v2.13.0)
librealsense v2.13.0 requires CMake 3.8+; Jetson has 3.5.1 so CMake is rebuilt
L4T 28.2 / L4T 28.2.1 (JetPack 3.2.1)
librealsense 2.13.0
https://blog.csdn.net/u013595260/article/details/86522385
downloading from https://github.com/jetsonhacks/buildLibrealsense2TX
cd buildLibrealsense2TX
then run step2 and step3
step1:
cd ~ ,copy folder librealsense,v3.11.4.zip to there (这两个是事先下好的,也可以直接运行step2,同样可以下载这两个,但是会很慢)
step2:
./buildPatchedKernel.sh
step3:
先修改installLibrealsense.sh的第116行左右,在本行后面添加: -DBUILD_PYTHON_BINDINGS=true
运行 ./installLibrealsense.sh #这里需要realsense相机连接tx2
(后面会出现 [n]的信息,键盘输入 n就可以了)
step4: 添加环境变量
export PYTHONPATH=$PYTHONPATH:/usr/local/lib
最终的环境变量为:export PYTHONPATH=~/caffe/python:/usr/local/lib:$PYTHONPATH
验证:
打开终端,输入$ rs-capture
python接口验证:
python3
import pyrealsense2 as rs
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)