Wsl2开启-Ubuntu换源
https://blog.csdn.net/WPwalter/article/details/101508601
这个blog是进行系统安装WSL2 的 Linux

第一步:启用虚拟机平台和 Linux 子系统功能
以管理员权限启动 PowerShell,然后输入以下命令启用虚拟机平台:
Enable-WindowsOptionalFeature -Online -FeatureName VirtualMachinePlatform
1以管理员权限启动 PowerShell,然后输入以下命令启用 Linux 子系统功能:
Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-Linux
1在以上每一步命令执行完之后,PowerShell 中可能会提示你重新启动计算机。按“Y”可以重新启动。

cd /mnt/y/backup/win10预览版need/linux-ubuntu/
https://docs.microsoft.com/en-us/windows/wsl/install-win10
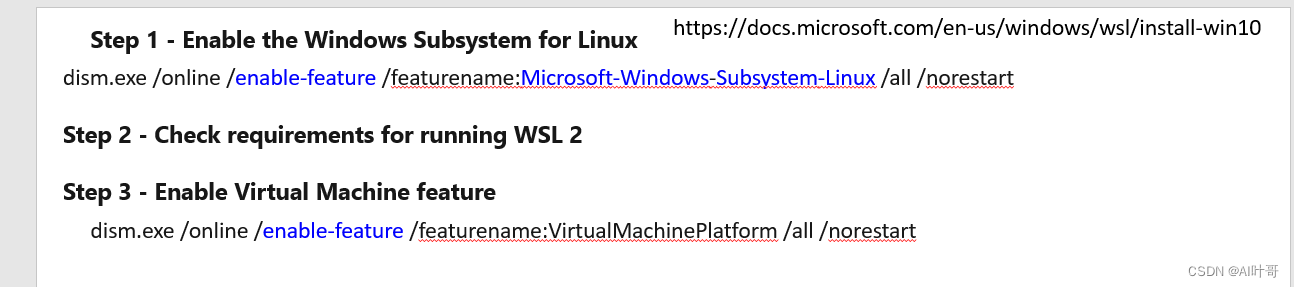
Step 1 - Enable the Windows Subsystem for Linux
dism.exe /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart
Step 2 - Check requirements for running WSL 2
Step 3 - Enable Virtual Machine feature
dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart
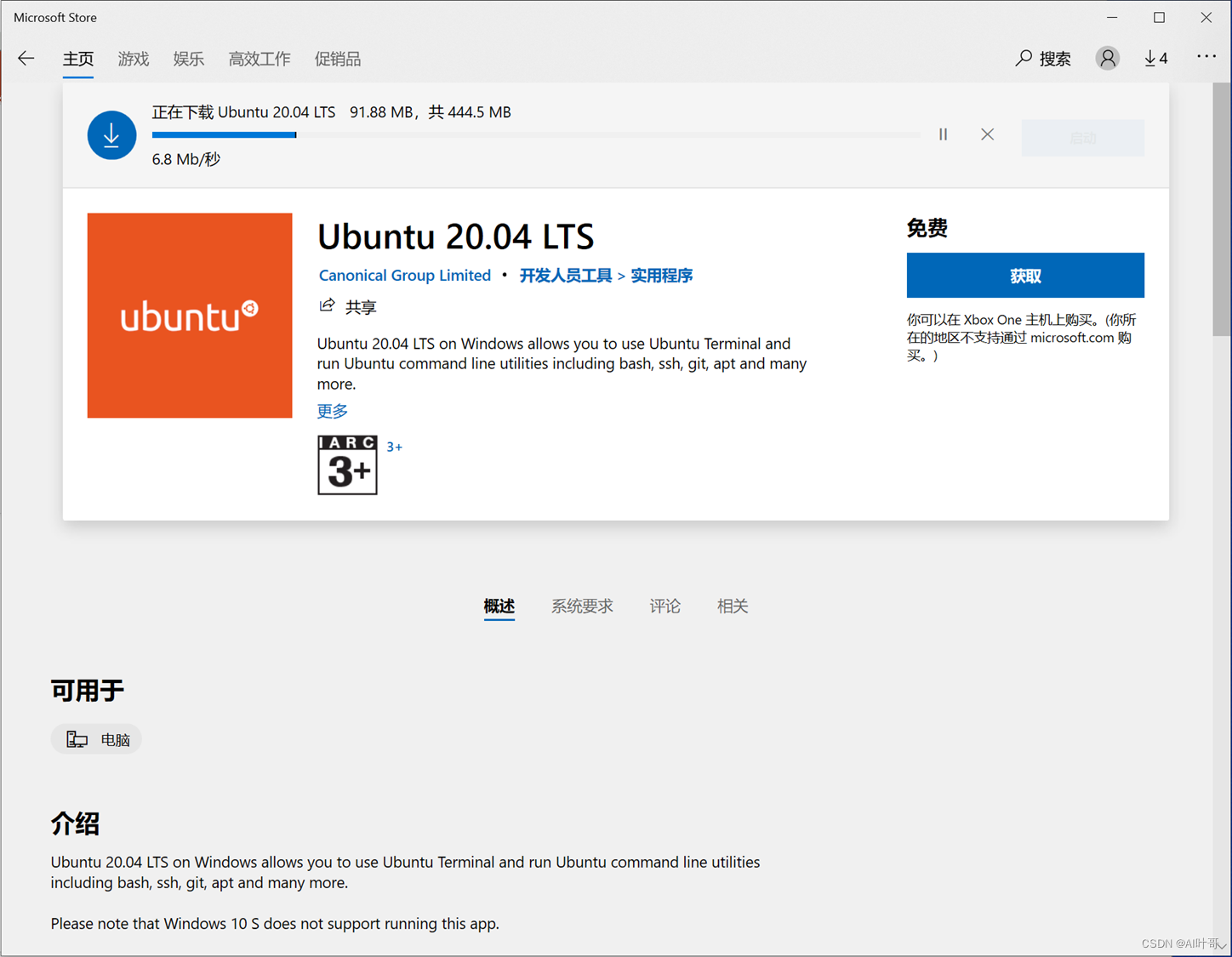
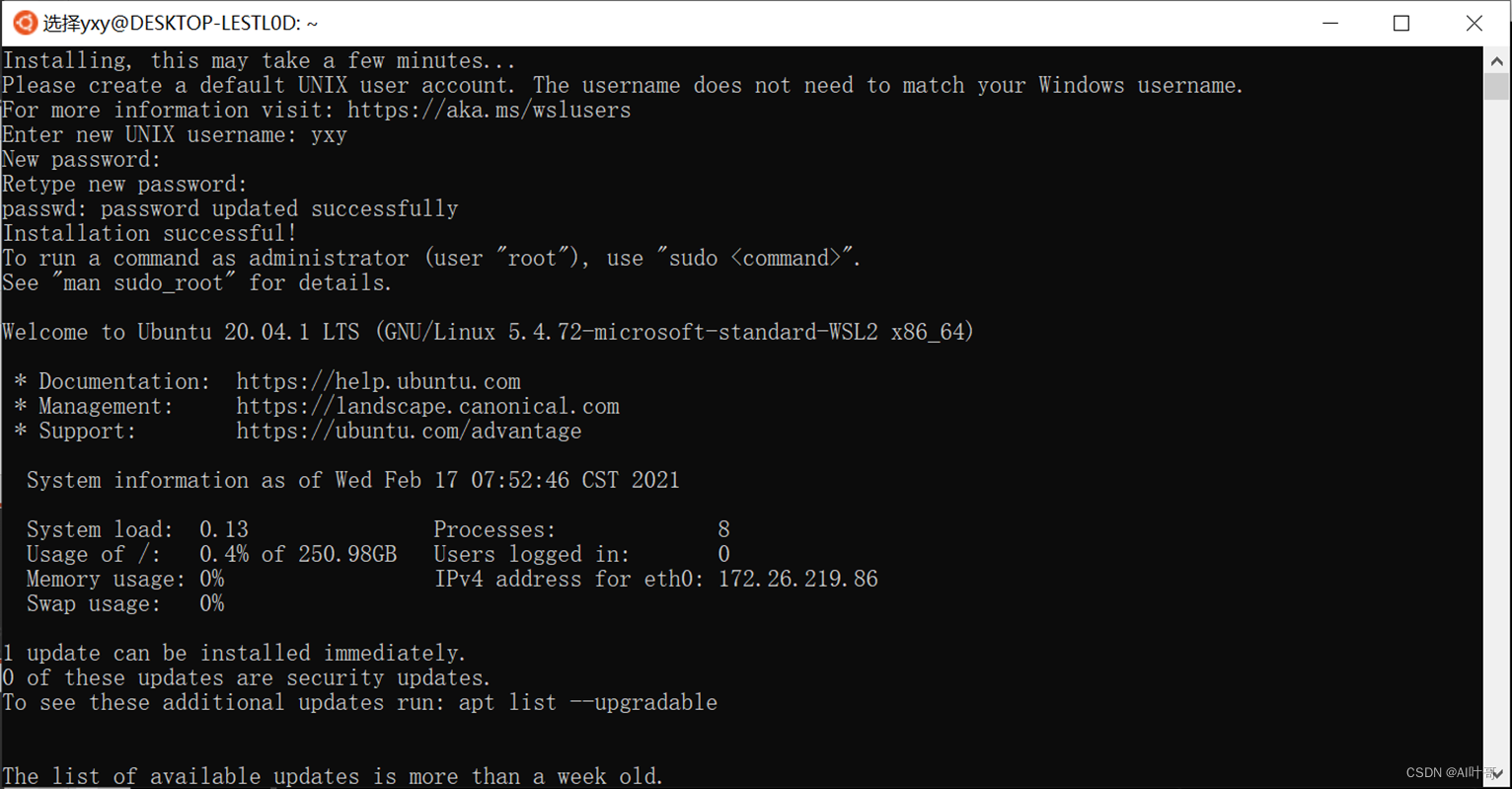
需要注意,在商店中的安装并没有实际上完成 Linux 子系统的安装,你还需要运行一次已安装的 Linux 发行版以执行真正的安装操作。
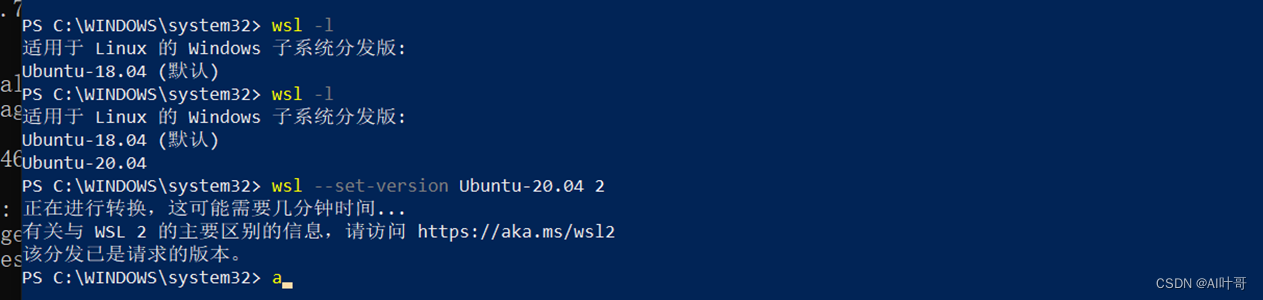

确保自己安装并启用了WSL2。1. 以管理员身份打开 PowerShell 并运行:dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart随后重启即可。2. 将 WSL 2 设置为默认版本,以管理员身份打开 PowerShell 并运行:wsl --set-default-version 2ps: 若提示"WSL 2 需要更新其内核组件”。下载并安装WSL 2 Linux 内核。3. 随后进入微软商店下载并安装对应的Linux版本即可。或者前往在此选择具体Linux版本。注:WSL必须安装在系统分区中。如果之前修改到了其它分区,请在下载安装对应Linux之前在win系统设置-系统-存储-更改新内容的保存设置-将新应用保存到…中选择对应系统分区,随后再进行安装。4. 验证请务必验证安装了WSL2(特别是以往就安装了WSL的电脑),以管理员身份打开 PowerShell 并运行:wsl --list --verbose如果返回的结果中version下的值为2,WSL2就安装成功了。

更换默认的WSL
https://ywnz.com/linuxjc/2539.html
使用 wslconfig.exe 命令行工具可以直接管理 Windows Subsystem for Linux(WSL)默认运行的 Linux 发行版。
该命令可以直接在命令提示符与 Windows PowerShell 中使用。
要查看当前 Windows 10 PC 中已安装的 Linux 发行版,可以执行如下命令:
wslconfig /l
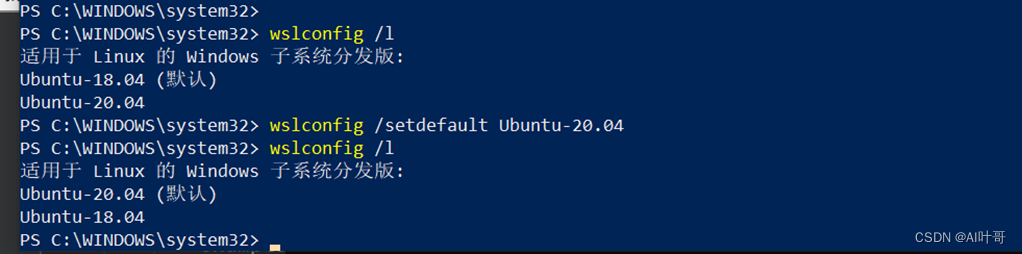
在返回结果中以(默认)结尾标示出的即为当前系统的默认 Linux 环境。
要更改默认的 Linux 发行版,请运行以下命令,其中 Name 是 Linux 发行版的名称:
wslconfig /setdefault Name
例如要将我默认环境由 Ubuntu 切换为 openSUSE Leap 42 系统,则可以执行如下命令:
wslconfig /setdefault openSUSE-42
wslconfig /setdefault Ubuntu-20.04
设置好之后当你再运行 wsl 或 bash 命令时,则会打开已选择好的 Linux 发行版。当使用 wsl [command] 或 bash -c [command] 运行单个命令时,也会使用默认的 Linux 发行版。
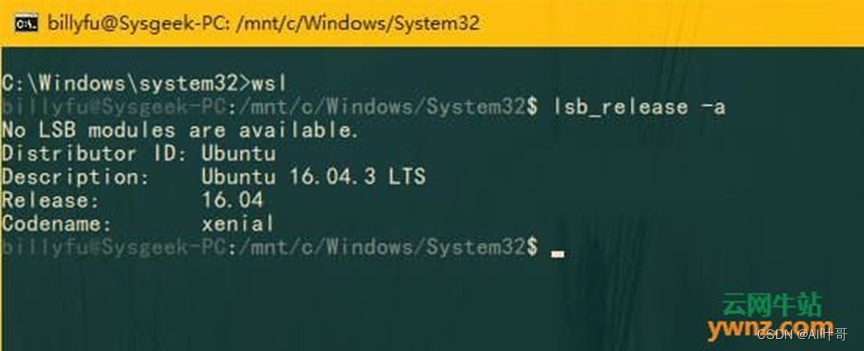
cd /mnt/c/Windows/System32
lsb_release -a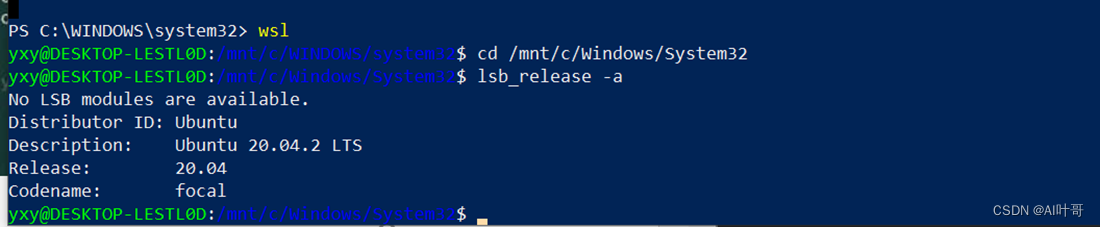
ubuntu16.04和18.04更换国内源
https://blog.csdn.net/u012308586/article/details/102953882

1.备份原始源文件source.list
桌面打开终端,执行命令:sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
2.修改源文件sources.list
(1)终端执行命令:sudo chmod 777 /etc/apt/sources.list 更改文件权限使其可编辑;
(2)执行命令: sudo gedit /etc/apt/sources.list 打开文件进行编辑;
(3)删除原来的文件内容,复制下面的任意一个到其中并保存(常用的是阿里源和清华源,推荐阿里源);
sudo vim /etc/apt/sources.list

3.更新源
桌面终端执行命令:sudo apt update更新软件列表,换源完成。

修改完软件源后,更新软件列表和软件
sudo apt update
sudo apt upgrade
这是Ubuntu18.04的源头,对于20.04不好使用
#https://blog.csdn.net/u012308586/article/details/102953882
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)