提示:本文针对的实例是Mavlink V2.0版本,Mavlink V1.0版本其实也是类似的的步骤,选择的mavlink库不一样而已。
官方链接放在此:Install MAVLink · MAVLink Developer Guide
前言
Mavlink是一种非常轻量级的消息传输协议,用于地面站控制终端(地面站)与无人机之间(以及机载无人机组件之间)进行通信。mavlink V1.0以0xFE为头;mavlinkV2.0以0xFD为头
一、准备材料
1.准备预建的MAVLINK库(请根据需求选择下载MAVLINKV1.0或者MAVLINKV2.0版本):
- c_library_v2 (MAVLink V2.0)
- c_library_v1 (MAVLink V1.0)
2.搭建环境(python3 和 git)
python环境:
1.进入python官网下载window版本下的python(Python for Windows)。
请根据需求和电脑版本进行下载,本文下载的是python-3.10.6,64位,安装步骤如下:
1)双击下载的.msi安装包进行安装界面。


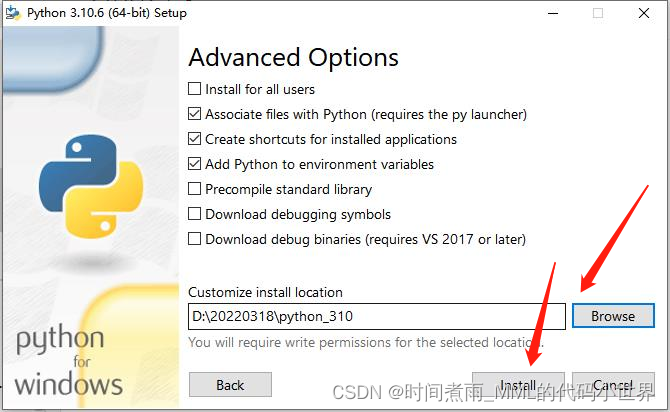
2)点击“运行",进入下一步。务必勾选上”Add Python 3.10 to PATH“,添加路径至系统变量中,你可以选择默认路径下载,或者自定义路径安装,这里比较建议自定义路径安装。

点击”Next“进入下一步。

点击”Browse“选择要安装的路径,再点击”Install“安装,直至安装完成,点击”close“

至此,python安装完毕
3)安装future模块
键盘输入”win+R“调出运行界面,输入cmd确认后进入终端界面
使用python命令即可在终端查看python信息,使用exit()命令可退出python环境

在终端中使用pip3 install future命令安装future模块,本电脑已经安装了相应模块

Git环境:本电脑已经安装了git软件,故不再一步步截图安装,再次放出下载Git安装路径Git官方点击下载,读者可根据安装提示一直下一步即可,比较简单。
二、使用步骤
1.下载mavlinkgenerator
1)新建一个空文件夹mavlink,进入该文件夹后右击,右击选择“git bush here”;
2)在git 命令窗口中执行方式:
git clone GitHub - mavlink/mavlink: Marshalling / communication library for drones.
如果下载失败的话可以考虑换个网多试几下,最好能翻墙下载,这样比较快。
注意:此处我的mavlink下载到了C盘用户目录下,由于python安装在D盘,我就把mavlink文件夹复制到了D盘,和python在同一个目录下
在git终端中切换到mavlink文件夹下,更新子模块
git submodule update --init –recursive
(一定要更新子模块,不然后续运行会出错)
3)执行mavgenerate.py,这是用Python语言编写的MAVLink的图形用户界面代码生成器。

XML:选择c_library_v2-master/message_definitions/common.xml。

Out :自己选择一个目录存储(可新建一个文件用来存放生成的结果)
Language:选择自己需要的语言(注意:mavlinkV2.0版本 protocol要选为2.0;mavlinkV1.0版本 protocol选择1.0)
点击Generate则可.(可看见生成结果的文件夹中会出现以下的库文件)

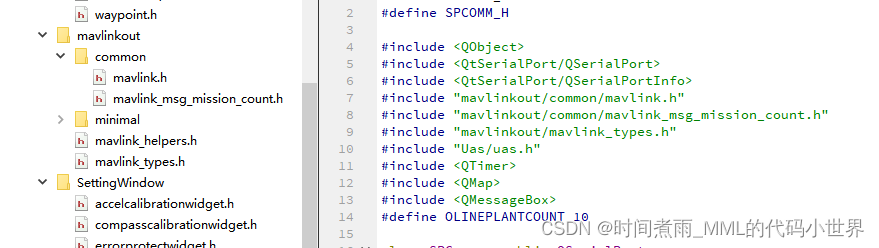
2.导入程序中使用
可将上述文件加导入到自己的项目中去,再需要的地方引入/common/mavlink.h即可使用:
总结
记录于2022/09/05,第一次写入博客,记录之意。如有问题,欢迎评论区讨论奥
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)