上一篇教程:Win10+Ubuntu18.04双系统安装 & ROS Melodic安装
一、Gazebo安装
在终端运行
sudo apt-get install ros-melodic-gazebo-ros-pkgs ros-melodic-ros-control
参考 https://blog.csdn.net/weixin_45839124/article/details/106367520
修改配置文件,在终端运行
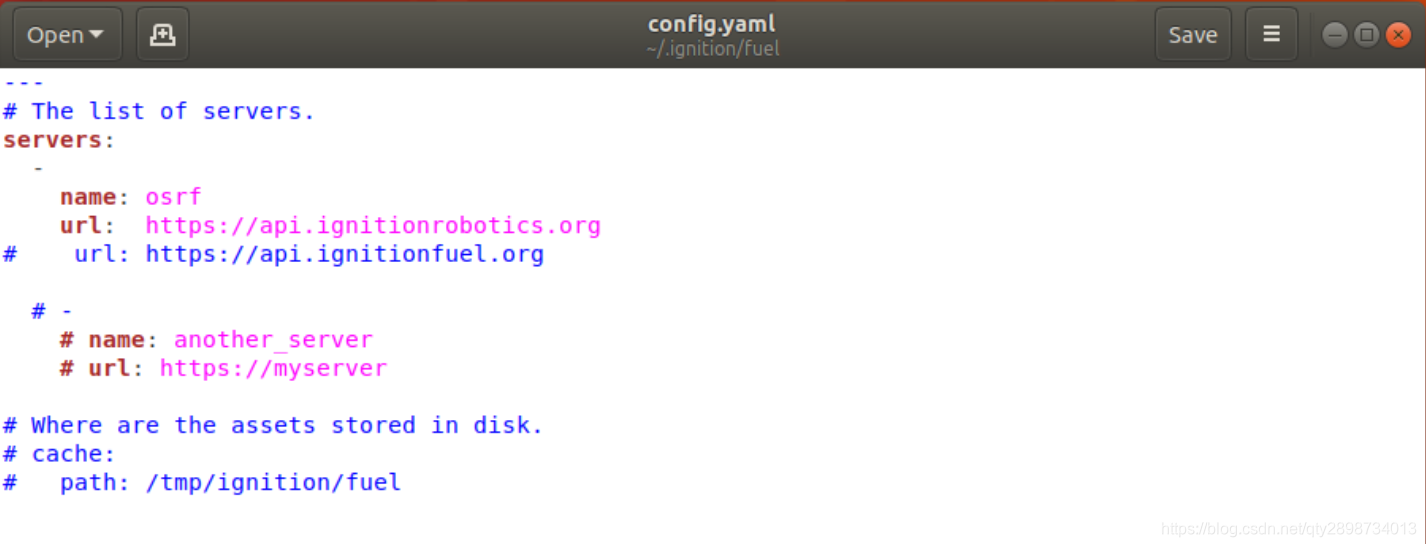
sudo gedit ~/.ignition/fuel/config.yaml
将
url: https://api.ignitionfuel.org
用 # 注释掉
添加
url: https://api.ignitionrobotics.org
修改后如下图所示:
注:若使用VMWare虚拟机运行Gazebo,需要添加环境变量(若使用双系统则可忽略)
export SVGA_VGPU10=0
echo "export SVGA_VGPU10=0" >> ~/.bashrc
测试Gazebo:
终端运行
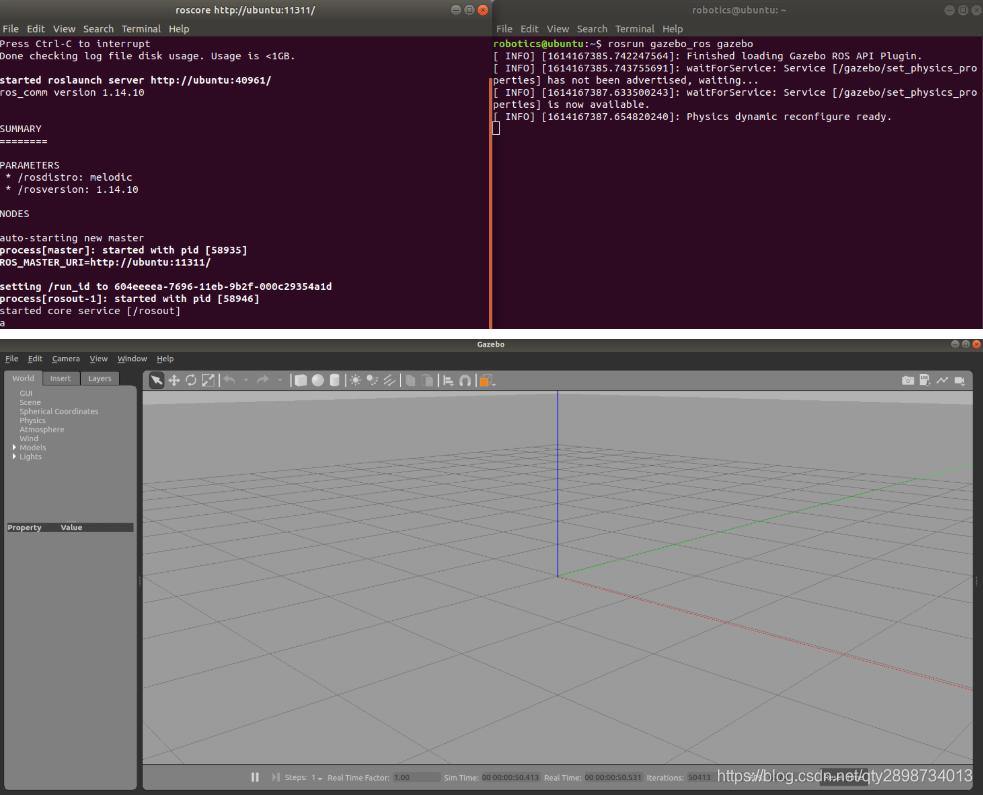
roscore
在新的终端运行
rosrun gazebo_ros gazebo
成功启动后界面如下图:
在实际使用Gazebo过程中,由于Gazebo默认在线加载模型,因此初次启动新地图与模型较慢,可将gazebo模型包复制于~/.gazebo/models 路径(若没有models文件夹则新建)下,
Gazebo模型包下载链接:https://jbox.sjtu.edu.cn/l/iFi6Wq
复制后如下图:
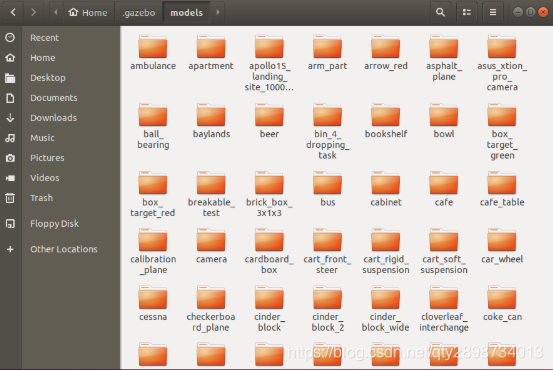
之后启动Gazebo时会明显加快。
二、Turtlebot包安装
参考 https://www.ncnynl.com/archives/201903/2884.html
a. 安装依赖项
sudo apt-get install ros-melodic-kobuki-*
sudo apt-get install ros-melodic-ecl-streams
sudo apt-get install ros-melodic-bfl
sudo apt-get install ros-melodic-map-server
sudo apt-get install ros-melodic-move-base
sudo apt-get install ros-melodic-amcl
sudo apt-get install ros-melodic-dwa-local-planner
sudo apt-get install libusb-dev
sudo apt-get install libspnav-dev
sudo apt-get install ros-melodic-joystick-drivers
sudo apt-get install bluetooth
sudo apt-get install libbluetooth-dev
sudo apt-get install libcwiid-dev
b. 新建工作空间,准备相关包
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
git clone git://github.com/turtlebot/turtlebot_simulator
git clone git://github.com/turtlebot/turtlebot.git
git clone git://github.com/turtlebot/turtlebot_apps.git
git clone git://github.com/udacity/robot_pose_ekf
git clone git://github.com/ros-perception/depthimage_to_laserscan.git
git clone git://github.com/yujinrobot/kobuki_msgs.git
git clone git://github.com/yujinrobot/kobuki_desktop.git
git clone git://github.com/ncnynl/turtlebot_viz
git clone git://github.com/turtlebot/turtlebot_create.git
cd kobuki_desktop/
rm -r kobuki_qtestsuite
git clone git://github.com/toeklk/orocos-bayesian-filtering.git
git clone git://github.com/turtlebot/turtlebot_msgs.git
git clone git://github.com/ros-drivers/joystick_drivers.git
c. 复制kobuki和yujin_ocs依赖库到turtlebot_ws/src工作空间下
mkdir -p ~/repos/
cd ~/repos/
git clone git://github.com/yujinrobot/kobuki.git
cp -r kobuki/* ~/turtlebot_ws/src/
git clone git://github.com/yujinrobot/yujin_ocs.git
cp -r yujin_ocs/yocs_cmd_vel_mux/ yujin_ocs/yocs_controllers ~/turtlebot_ws/src/
d. 编译工作空间
cd ~/turtlebot_ws
catkin_make
e. 添加工作空间到bashrc文件并启用环境变量
echo "source ~/turtlebot_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
f. 尝试在Gazebo中启动Turtlebot
在终端执行
roscore
在新的终端执行
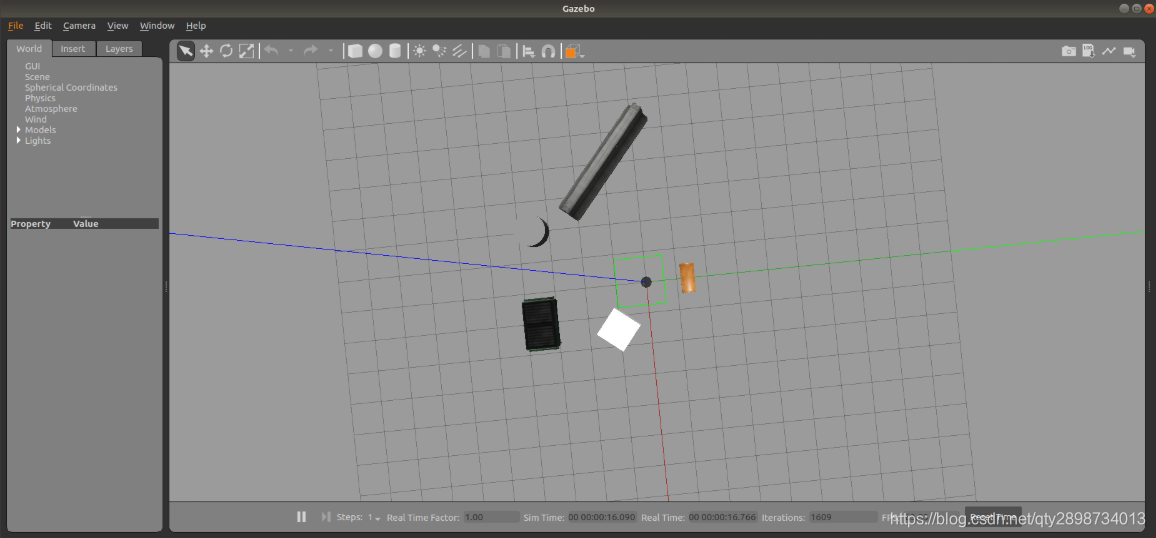
roslaunch turtlebot_gazebo turtlebot_world.launch
成功运行如下图所示:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)