树莓派4B搭建Ubuntu20.04与ROS
文章目录
-
- 前言
- 一、安装Ubuntu20.04
- 1.下载Ubuntu20.04LTS server
- 2.将镜像文件用Win32DiskImager烧录进SD卡中
- 3.设置开机自动连接WIFI,以方便后续ssh远程连接
- 4.查询树莓派ip
- 5.使用Putty连接
- 6.更换国内镜像源
- 7.安装桌面
- 7.windows远程连接
- 二、安装Ros
- 1.添加ROS源与密钥
- 2.安装
- 3.初始化
- 3.运行小乌龟
前言
树莓派4B入手有一段时间了,那时只是安装了树莓派系统就没再动过,后来一直在搞飞控。现在发现需要跑系统,例如激光雷达对室内环境的建模,单纯飞控就处理不过来了,于是开始学习系统,先用树莓派跑个ROS学习一下。本人水平有限,在借鉴了一些大佬的文章下成功安装ROS
一、安装Ubuntu20.04
需要提前准备SD卡、工作WiFi、Putty、SD Card Formatter 、Win32DiskImager
1.下载Ubuntu20.04LTS server
官网网址:https://cn.ubuntu.com/download/raspberry-pi
 这里可以自行选择是否有桌面版本,服务器版本可以后续安装桌面
这里可以自行选择是否有桌面版本,服务器版本可以后续安装桌面
2.将镜像文件用Win32DiskImager烧录进SD卡中
如果你的SD之前烧录过系统,需要用SD Card Formatter先对其进行格式化。
 选项设置为快速格式化即可
选项设置为快速格式化即可

选择你下载的.img文件写入SD卡中。
3.设置开机自动连接WIFI,以方便后续ssh远程连接
我这里直接选择无线的连接方式,毕竟带着一根网线太麻烦了。
1、Ubuntu20.04自动开启ssh,因此不用添加ssh文件
2、在电脑上打开SD的boot文件里的network-config,去掉一些#,修改为如下
 access-points:下一行修改为你的wifi名称,如果名称里有空格则需要“名称”,password:“你的wifi密码”。保存退出,弹出SD卡插入树莓派卡槽。
access-points:下一行修改为你的wifi名称,如果名称里有空格则需要“名称”,password:“你的wifi密码”。保存退出,弹出SD卡插入树莓派卡槽。
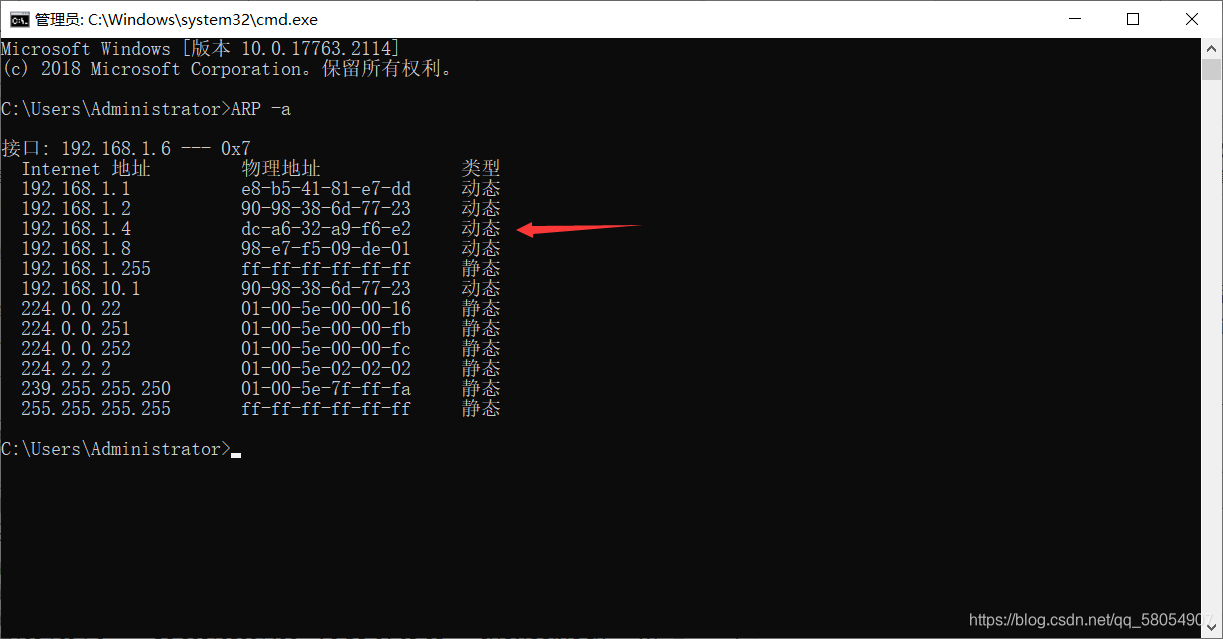
4.查询树莓派ip
系统第一次开机后不会自动连接wifi,当系统开机结束后,重新上电。
将你的电脑连入同一网络。打开cmd,输入ARP -a,查询树莓派的ip地址,或者使用Wireless Network Watcher

5.使用Putty连接
Putty是一个免费的ssh客户端
 打开putty,在ip address里输入树莓派的ip地址,然后ssh连接。
打开putty,在ip address里输入树莓派的ip地址,然后ssh连接。

第一次登陆的用户名和密码都是:ubuntu
然后会让你修改密码,重新登陆
6.更换国内镜像源
这一步比较重要
1、有人说ubuntu20.04会自动选择最优源,但还是学会自己更改一下比较好
2、sudo vim /etc/apt/sources.list打开下载源文件,具体vim使用方法要熟练掌握,或者使用nano:sudo nano /etc/apt/sources.list
3、国内有很多源,若选择了清华源,将文件中的ports.ubuntu.com都换成mirrors.tuna.tsinghua.edu.cn,若是中科大源,将文件中的ports.ubuntu.com都换成mirrors.ustc.edu.cn.注意因为树莓派是arm构架,所以focal前是ubuntu-ports而不是ubuntu,更换的时候要注意

4、sudo apt update更新一下
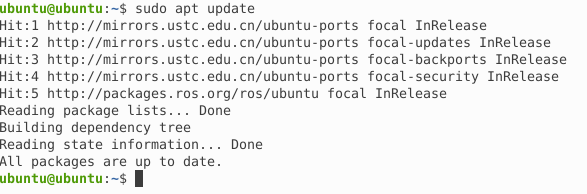
如果出现错误则仔细审查修改是否正确
7.安装桌面
安装ubuntu桌面:sudo apt-get install ubuntu-desktop
安装xubuntu桌面:sudo apt-get install xubuntu-desktop
注意:安装xubuntu桌面在远程连接的时候可能会出现闪退的情况,需要执行echo “xfce4-session” >~/.xsession 创建xsession文件即可
7.windows远程连接
因为没有显示屏,所以选择xrdp
安装VNC:sudo apt-get install tightvncserver
安装XRDP:sudo apt-get install xrdp
win+r输入mstsc打开win10远程桌面连接,输入树莓派ip,点击连接
默认xorg连接,输入用户名及密码
 我这里安装的是xbuntu
我这里安装的是xbuntu
二、安装Ros
1.添加ROS源与密钥
ROS源:sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
密钥:sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
网上的密钥有几种,源也有不同的
更新sudo apt-get update
2.安装
安装预备环境:sudo apt install python3-rosdep注意这里已经是python3了,有的博客哪里还没有更新
sudo apt install ros-noetic-desktop-full下载完整桌面版
ubuntu不同版本对应的ROS版本不一样
这里20.04对应的是noetic
安装时间可能会很长
3.初始化
sudo rosdep init
rosdep update
这里可能会出错,多半是网络的原因,使用手机热点可能会好一些,或者修改后host
这里其实是从github上下载一些文件,方便后续使用的包自动更新,所以可以用网上的方法,自己创建文档复制github上的内容,跳过init这一步即可
或者选择放弃,之后使用的时候需要哪些包再手动安装,或切换网络
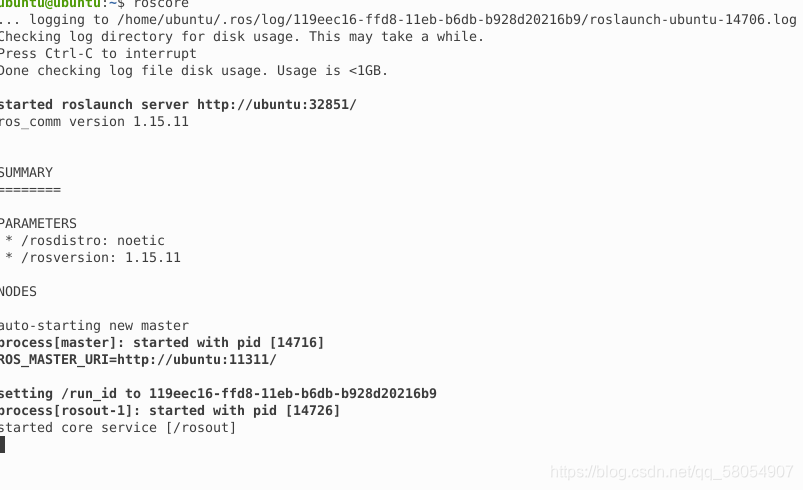
3.运行小乌龟
打开第一个终端:roscore
打开第二个终端:rosrun turtlesim turtlesim_node
 打开小乌龟界面
打开小乌龟界面
打开第三个终端:rosrun turtlesim turtle_teleop_key
 打开小乌龟控制界面,在选择了第三个终端的情况下,可以使用上下左右键控制小乌龟了
打开小乌龟控制界面,在选择了第三个终端的情况下,可以使用上下左右键控制小乌龟了
至此,ROS安装成功
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)