一.例子

如上图的小萝卜机器人,要使其具有自主运动能力至少需要两个条件:
1. 我在什么地方?——定位。
2. 周围环境是什么样?——建图。
因此它既需要知道自身的状态-位置,也要了解所在的环境-地图。解决这些问题的方法非常多,如携带于机器人本体上的传感器,例如机器人的轮式编码器、相机、激光等等,另一类是安装于环境中的,例如导轨、二维码标志等等。

二.相机
在视觉SLAM中主要是用相机去解决定位与建图问题。按照相机的工作方式,把相机分为单目(Monocular)、双目(Stereo)和深度相机(RGB-D)三个大类,如下图所示。直观看来,单目相机只有一个摄像头,双目有两个,而 RGB-D 原理较复杂,除了能够采集到彩色图片之外,还能读出每个像素离相机的距离。它通常携带多个摄像头,工作原理和普通相机不尽相同。此外,SLAM 中还有全景相机 、Event 相机 等特殊或新兴的种类。

单目相机 :
只使用一个摄像头进行 SLAM 的做法称为单目 SLAM(Monocular SLAM)。这种传感器结构特别的简单、成本特别的低,所以单目 SLAM 非常受研究者关注,它的数据格式就是常见的照片。
照片本质上是拍照时的场景(Scene),在相机的成像平面上留下的一个投影。它以二维的形式反映了三维的世界。显然,这个过程丢掉了场景的一个维度:也就是所谓的深度(或距离)。在单目相机中,我们无法通过单个图片来计算场景中物体离我们的距离(远近)——之后我们会看到,这个距离将是 SLAM 中非常关键的信息。由于我们人类见过大量的图像,养成了一种天生的直觉,对大部分场景都有一个直观的距离感(空间感),它帮助我们判断图像中物体的远近关系。比如说,我们能够辨认出图像中的物体,并且知道它们大致的大小;比如近处的物体会挡住远处的物体,而太阳、月亮等天体一般在很远的地方;再如物体受光照后会留下影子等等。这些信息可以都帮助我们判断物体的远近,但也存在一些情况,这个距离感会失效,这时我们无法判断物体的远近以及它们的真实大小。由于单目相机只是三维空间的二维投影,所以,如果我们真想恢复三维结构,必须移动相机的视角。
在单目 SLAM 中也是同样的原理。我们必须移动相机之后,才能估计它的运动(Motion),同时估计场景中物体的远近和大小,称之为结构(Structure)。如果相机往右移动,那么图像里的东西就会往左边移动——这就给我们推测运动带来了信息。另一方面,我们还知道近处的物体移动快,远处的物体则运动缓慢。于是,当相机移动时,这些物体在图像上的运动,形成了视差。通过视差,我们就能定量地判断哪些物体离得远,哪些物体离的近。
单目 SLAM 估计的轨迹和地图,将与真实的轨迹、地图,相差一个因子,也就是所谓的尺度(Scale)。由于单目 SLAM 无法仅凭图像确定这个真实尺度,所以又称为尺度不确定性。

单目相机数据
双目相机 (Stereo) 和深度相机 :
双目相机和深度相机的目的,在于通过某种手段测量物体离我们的距离,克服单目无法知道距离的缺点。如果知道了距离,场景的三维结构就可以通过单个图像恢复出来,也就消除了尺度不确定性。尽管都是为测量距离,但双目相机
与深度相机测量深度的原理是不一样的。双目相机由两个单目相机组成,但这两个相机之间的距离(称为基线(Baseline))是已知的。我们通过这个基线来估计每个像素的空间位置——这和人眼非常相似。我们人类可以通过左右眼图像的差异,判断物体的远近,在计算机上也是同样的道理。如果对双目相机进行拓展,也可以搭建多目相机,不过本质上并没有什么不同。
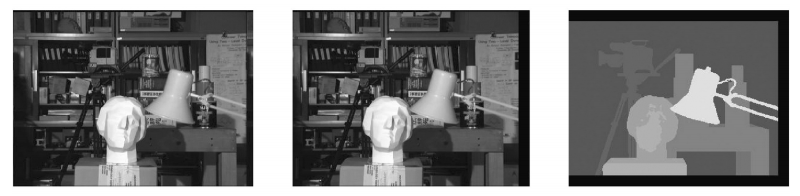
双目相机数据

深度相机数据
总结:
- 单目相机:以二维的形式反应了三维的世界,丢掉了深度,也就是物体到我们的距离。
- 双目相机:克服了单目相机的深度问题,通过已知两眼间的距离后大量计算。
- 深度相机(RGB-D):克服了深度问题。原理是通过激光传感器,通过主动向物体发射光并接收返回的光,测出物体离相机的距离,节省了大量计算,存在的问题是范围窄,视野小,易受日光干扰。
三.经典视觉SLAM框架

整个视觉 SLAM 流程分为以下几步:
1. 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机
器人中,还可能有码盘、惯性传感器等信息的读取和同步。
2. 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,
以及局部地图的样子。VO 又称为前端(Front End)。
3. 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回
环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,
又称为后端(Back End)。
4. 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果
检测到回环,它会把信息提供给后端进行处理。
5. 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
四.SLAM问题的数学表述
假设小萝卜正携带着某种传感器在未知环境里运动,怎么用数学语言描述这件事呢?
首先,由于相机通常是在某些时刻采集数据的,所以我们也只关心这些时刻的位置和地图。这就把一段连续时间的运动变成了离散时刻 t = 1, . . . , K当中发生的事情。在这些时刻,用 X 表示小萝卜自身的位置。于是各时刻的位置就记为 X1, . . . ,Xk,它们构成了小萝卜的轨迹。地图方面,我们设地图是由许多个路标(Landmark)组成的,而每个时刻,传感器会测量到一部分路标点,得到它们的观测数据。不妨设路标点一共有 N个,用 Y1, . . . ,YN表示它们。在这样设定中,“小萝卜携带着传感器在环境中运动”,由如下两件事情描述:
1. 什么是运动?我们要考虑从 k -1 时刻到 k 时刻,小萝卜的位置 x 是如何变化的。
2. 什么是观测?假设小萝卜在 k时刻,于Xk处探测到了某一个路标Yj,我们要考虑这件事情是如何用数学语言来描述的。
通常,机器人会携带一个测量自身运动的传感器,比如说码盘或惯性传感器。这个传感器可以测量有关运动的读数,但不一定直接是位置之差,还可能是加速度、角速度等信息。然而,无论是什么传感器,我们都能使用一个通用的、抽象的数学模型:

这里uk是运动传感器的读数(有时也叫输入),wk为噪声。注意到,我们用一个一般函数 f 来描述这个过程,而不具体指明 f的作用方式。这使得整个函数可以指代任意的运动传感器,成为一个通用的方程,而不必限定于某个特殊的传感器上。我们把它称为运动方程。与运动方程相对应,还有一个观测方程。观测方程描述的是,当小萝卜在 xk位置上看到某个路标点yj,产生了一个观测数据 zk,j。同样,我们用一个抽象的函数h 来描述这个关系:

这两个方程描述了最基本的 SLAM 问题:当我们知道运动测量的读数u,以及传感器的读数 z 时,如何求解定位问题(估计 x)和建图问题(估计 y)?这时,我们把 SLAM问题建模成了一个状态估计问题:如何通过带有噪声的测量数据,估计内部的、隐藏着的状态变量。
状态估计问题的求解,与两个方程的具体形式,以及噪声服从哪种分布有关。按照运动和观测方程是否为线性,噪声是否服从高斯分布进行分类,分为线性非线性和高 斯非高斯系统。其中线性高斯系统(Linear Gaussian, LG 系统)是最简单的,它的无偏的最优估计可以由卡尔曼滤波器(Kalman Filter, KF)给出。而在复杂的非线性非高斯系统(Non-Linear Non-Gaussian,NLNG 系统)中,我们会使用以扩展卡尔曼滤波器(ExtendedKalman Filter, EKF)和非线性优化两大类方法去求解它。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)