ROS学习02-拿到NVIDIA JETSON TX2该做些什么
在前一片文章中我们已经将NVIDIA JETSON TX2完美的刷机了
ROS学习01-NVIDIA JETSON TX2 使用Jetpack4.4刷机指南
刷完机后连上显示器后NVIDIA桌面显示如下

哈 是不是超级酷!
酷是蛮酷的,我们接下来要做什么呢?
首先我们应该对这块ARM板子换源,否则下东西从Ubuntu官网下慢到你怀疑人生!
在前一篇文章中已经提过了这里就再累赘的讲一下吧
#为防止误操作后无法恢复,先备份原文件sources.list
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
#删除或注释掉原Ubuntu的源 更换为清华的源,亲测可用
sudo echo > /etc/apt/sources.list
sudo vim /etc/apt/sources.list
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
#更新源
sudo apt-get update
#更新软件包
sudo apt upgrade
#修复某些版本依赖关系
sudo apt-get -f install
#删除老旧包组
sudo apt autoremove
接下来发现我们的TX2没有汉语输入法,安装中文输入法
sudo apt-get install fcitx fcitx-googlepinyin fcitx-module-cloudpinyin fcitx-sunpinyin -y
# 因为上面的安装命令为了方便使用了通配符安装,所以会多安装一个fcitx-module-kimpanel,这个组件可能导致在非KDE桌面环境下Fcitx输入中文时不显示候选词框,如果是KDE桌面则无需移除。
#在TX2上默认装的是gnome,如果不执行下面的命令输入法候选框就不会弹出
sudo apt remove fcitx-module-kimpanel
打开设置修改键盘输入法系统为fcitx
如果在点语言支持的时候提示语言不完整就点下载
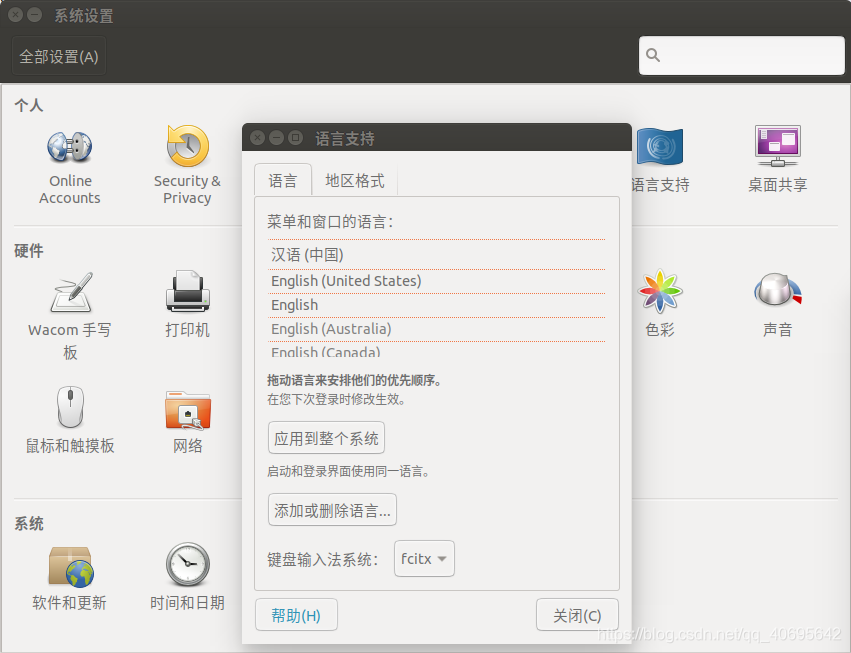
然后重启TX2中文输入法就可以用了
有人好奇我图片是怎么截出来的
嗯哼使用下面的命令即可调出系统截图工具
gnome-screenshot -a
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)