一、制作u盘启动盘
准备工作:
一个空的8G大小的u盘+ultraISO软件+ubuntu系统的镜像文件
1、下载并安装ultraISO软件
下载地址:百度网盘 请输入提取码
提取码:jv6a
2、镜像文件下载:
下载地址:Download Ubuntu Desktop | Download | Ubuntu
3、制作步骤:
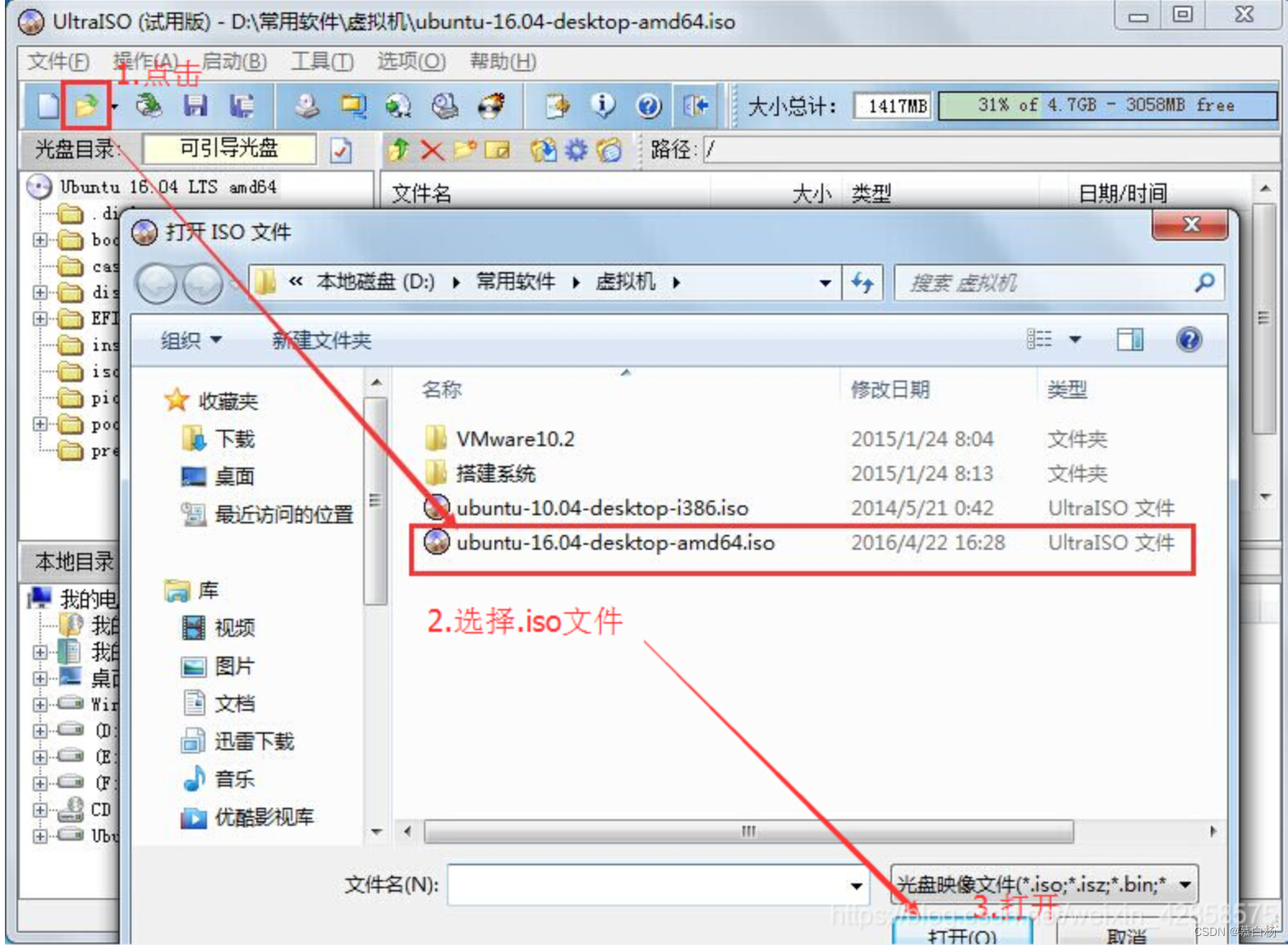
(1)打开ultraISO软件,打开存放在电脑上的镜像文件
(2)启动
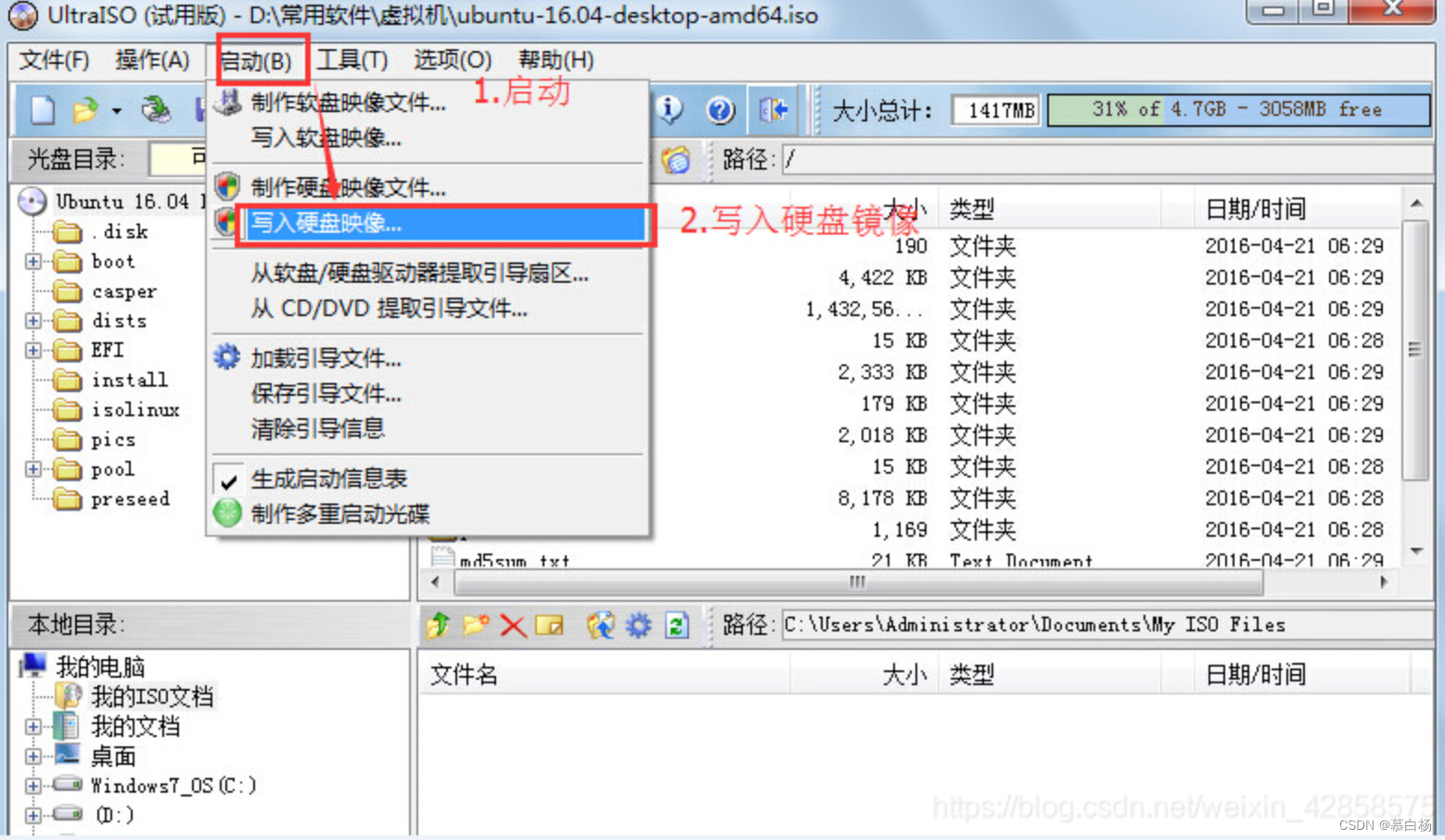
(3)写入
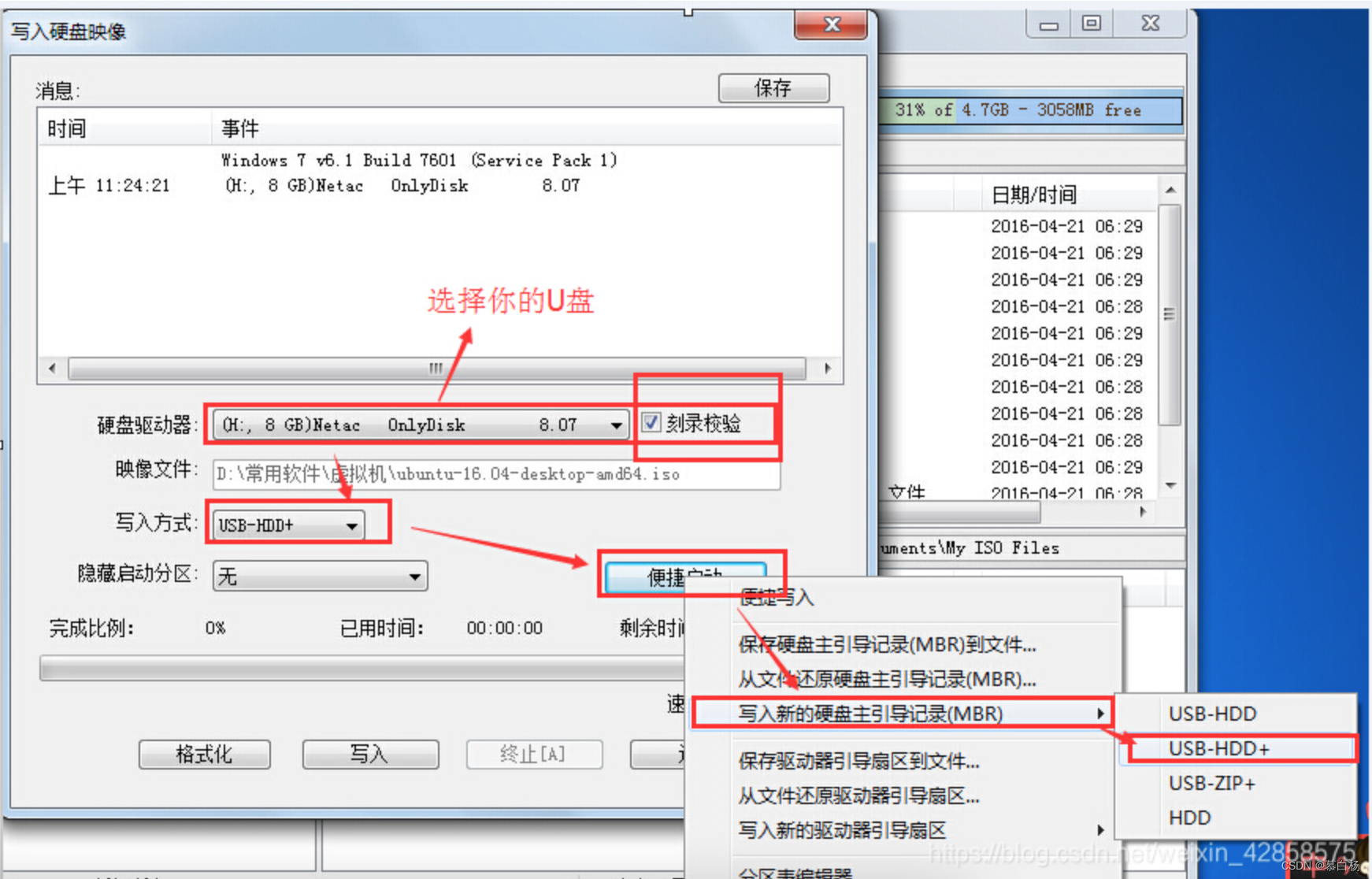
点击写入,等待大概十八分钟左右,显示刻录完成,即可关闭。
二、电脑分区
因为是双系统,所以必须给新后安装的系统(Ubuntu16.04)分配一个存储区域。
1、压缩卷
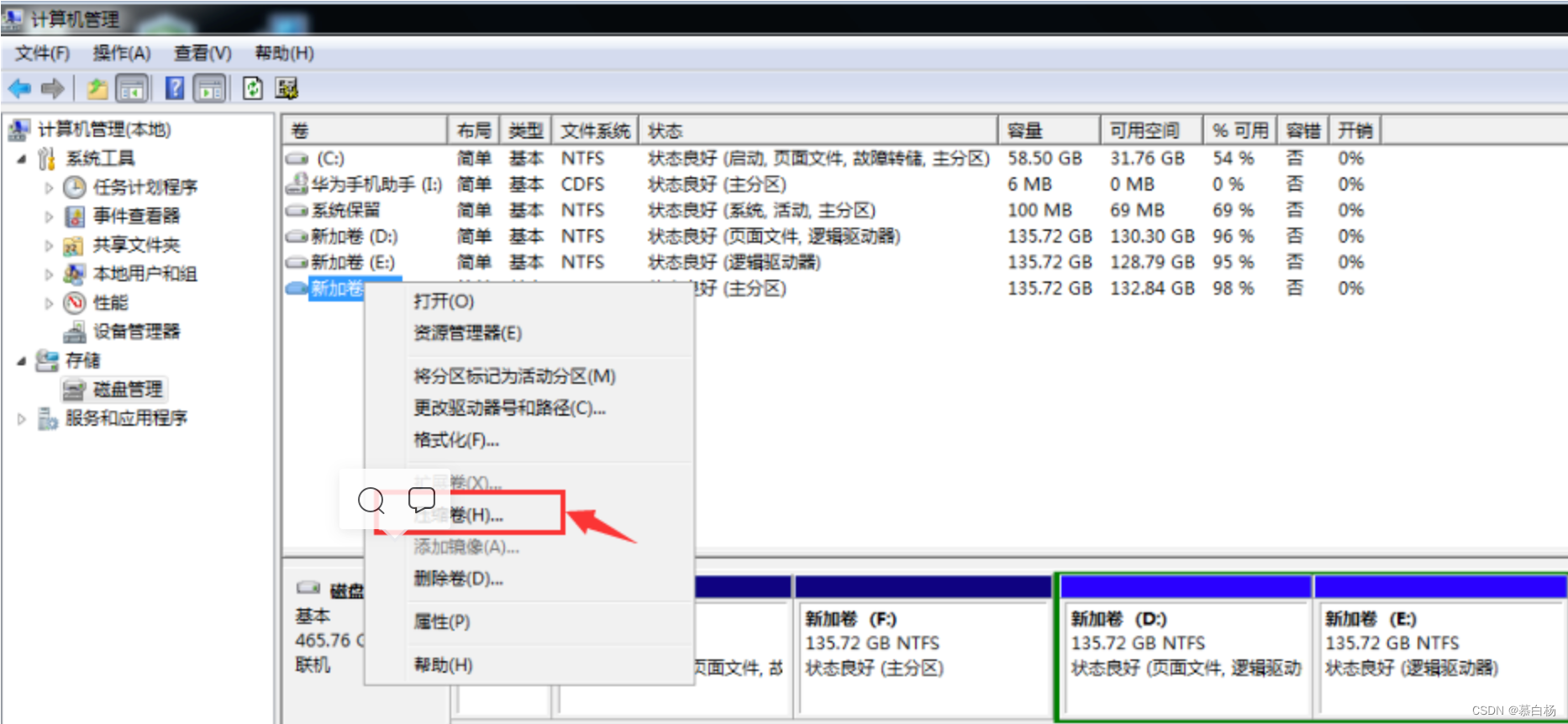
右键我的电脑,选择管理,在窗口中选择磁盘管理,这里显示的是系统的所有分区,选择一个空闲容量较大的磁盘,在磁盘上点击右键,选择“压缩卷”。
选择为Linux系统分配的空间大小,分配多大可以自行根据需求设置,如果不需要处理很多程序和数据的话一般20-30G就够用了。
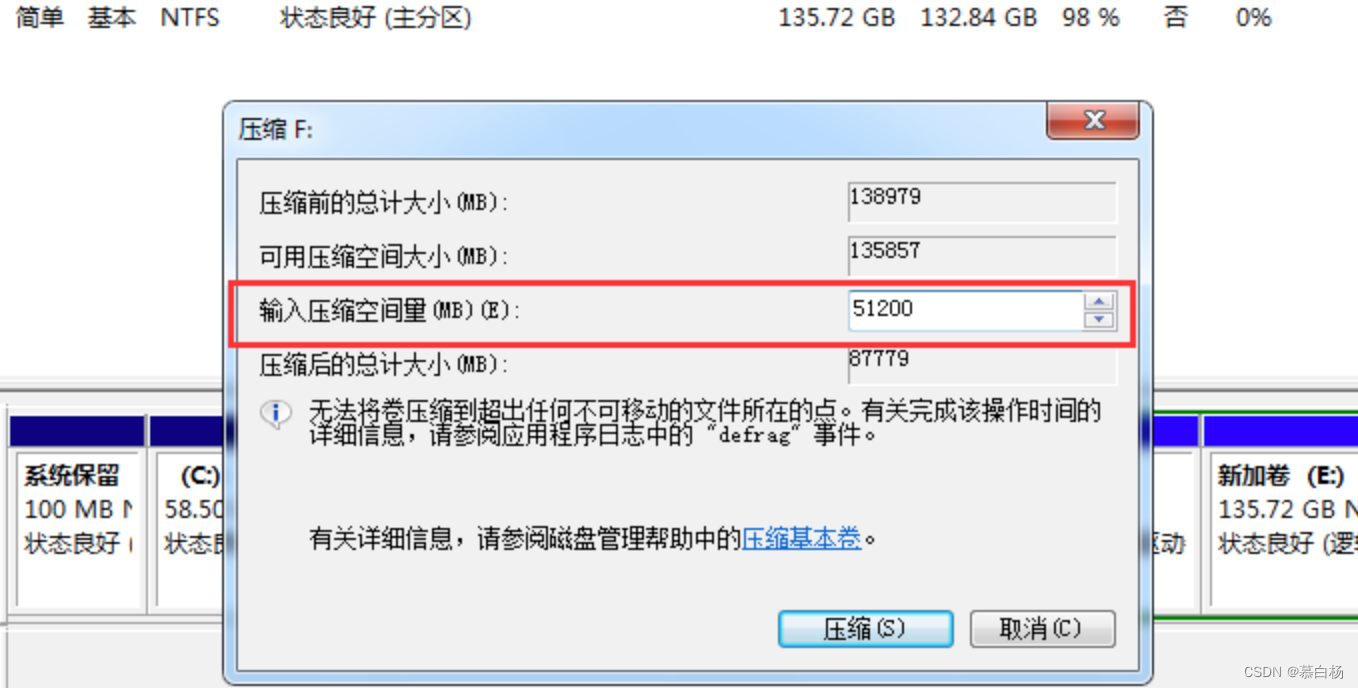
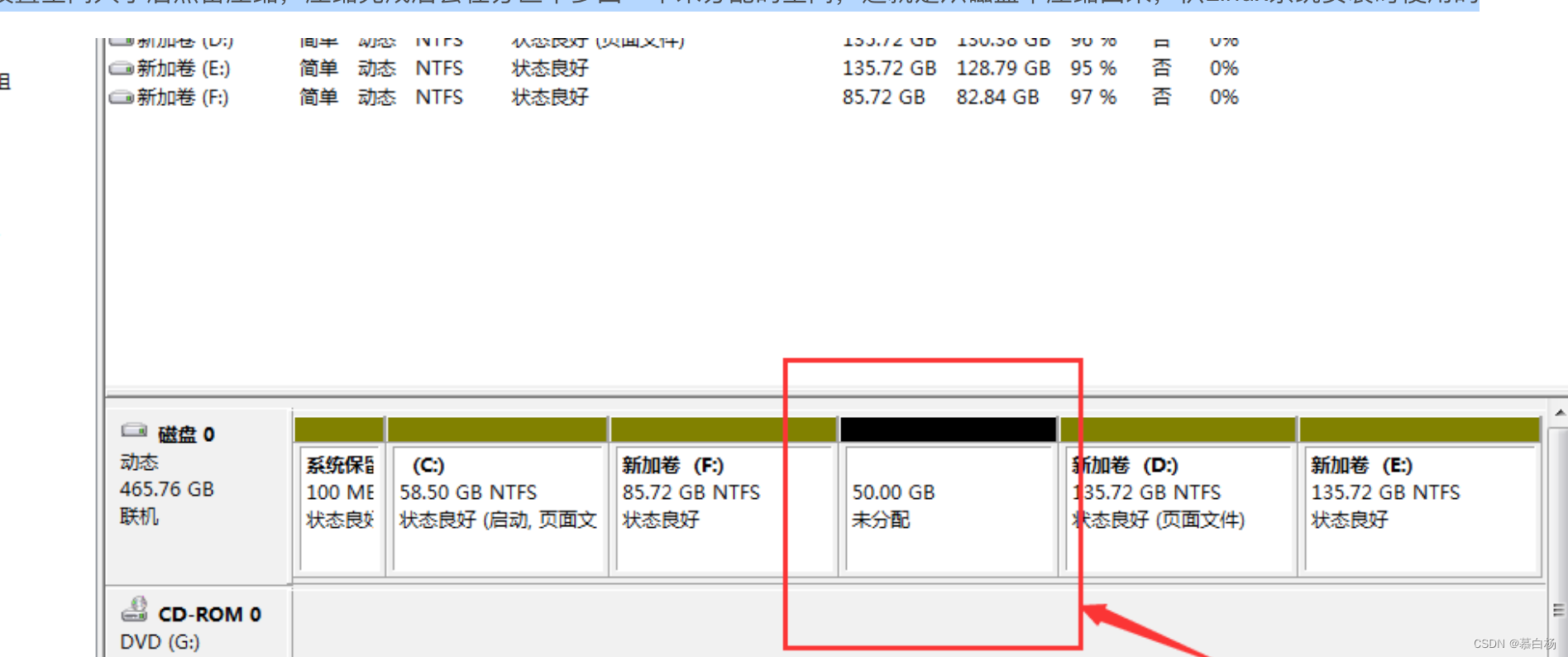
设置空间大小后点击压缩,压缩完成后会在分区中多出一个未分配的空间,这就是从磁盘中压缩出来,供Linux系统安装时使用的
三、安装Ubuntu系统
为Linux系统分配好空间后,插入U盘,重启电脑。
1、电脑刚启动时,按快捷键进入boot manager界面。(每个笔记本的快捷键都不一样,这里我的是fn+f12)
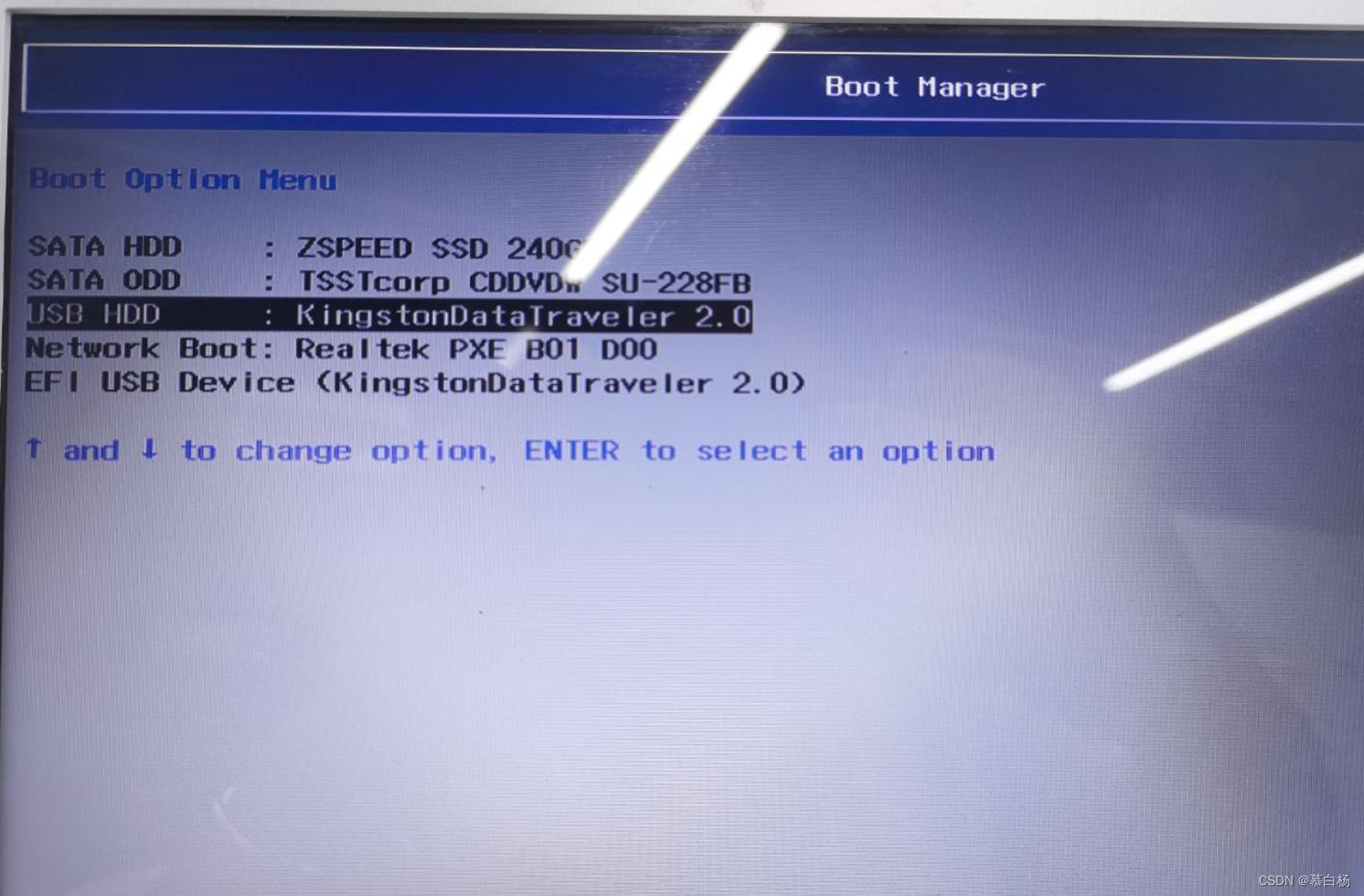
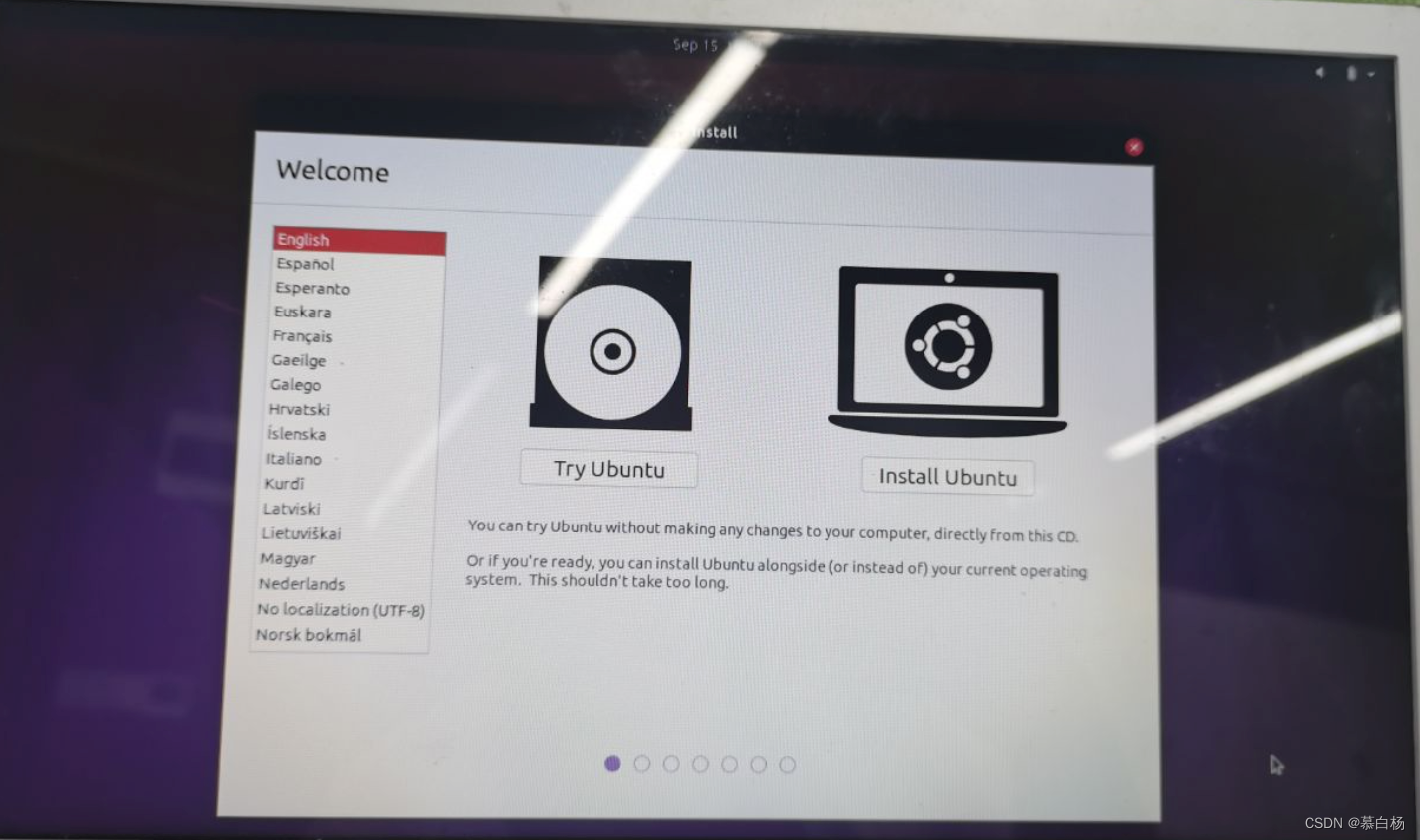
2、选择U盘启动后会进入Ubuntu系统安装界面,在左侧选择简体中文,点击安装Ubuntu
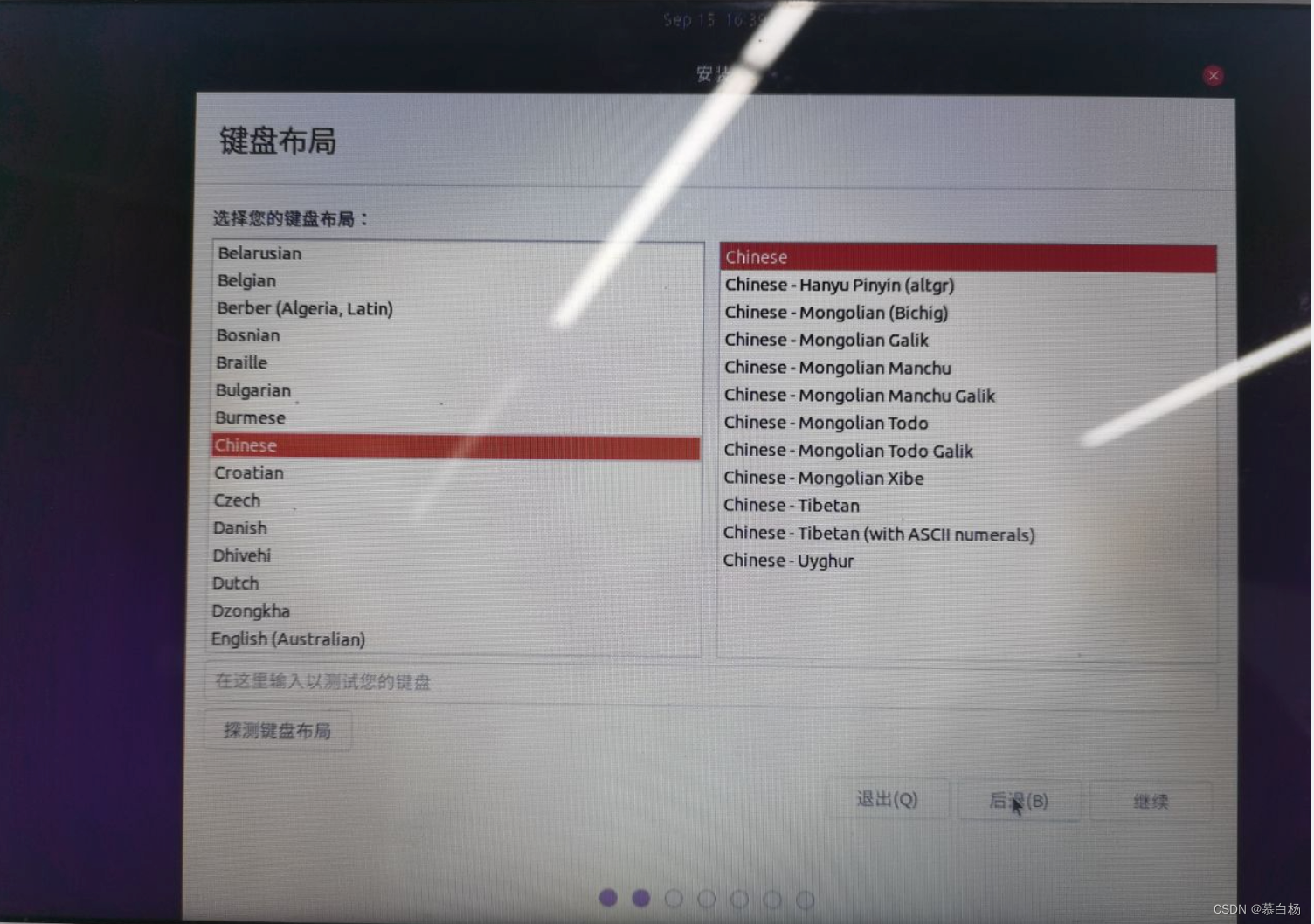
3、键盘布局,默认继续
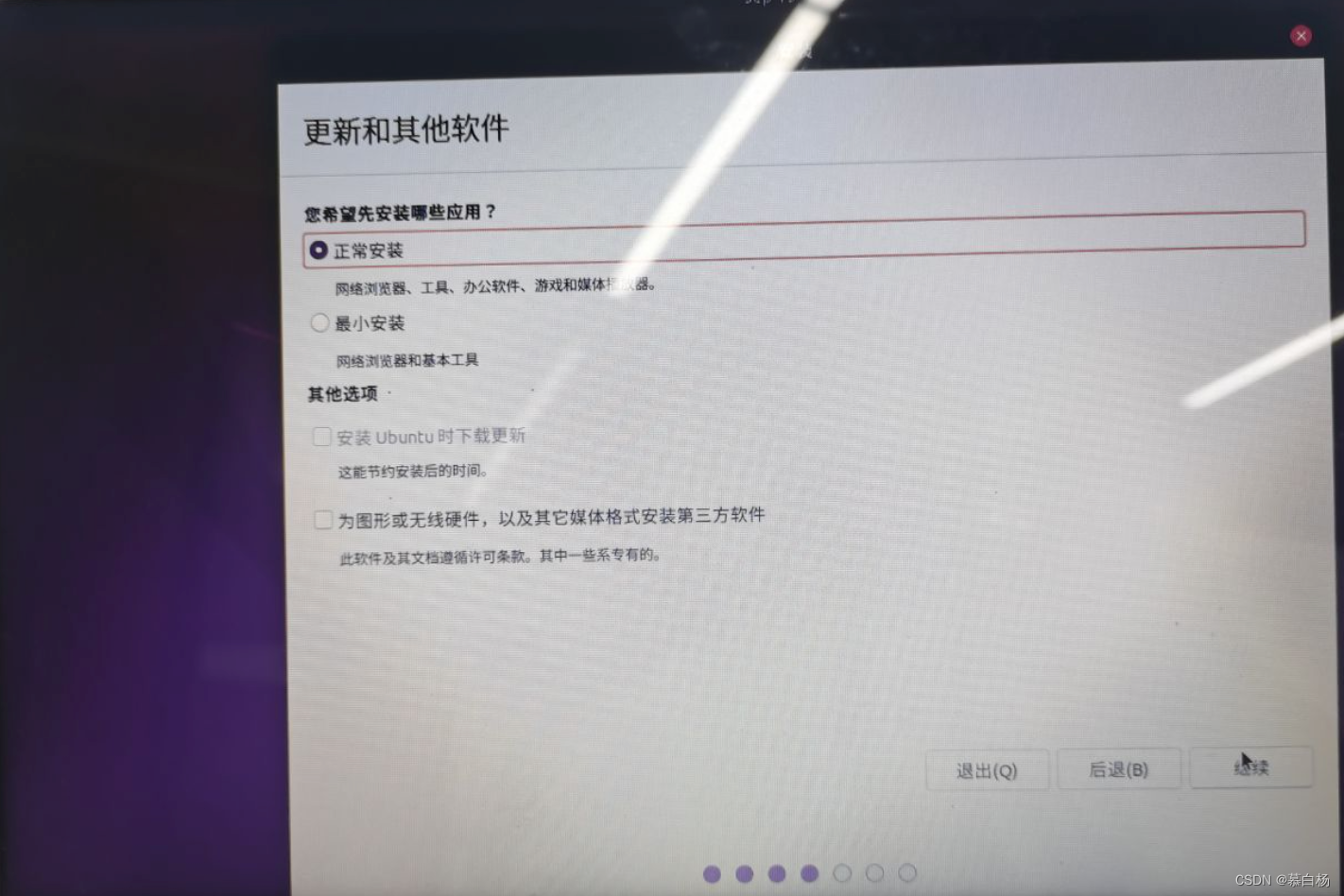
4、继续默认继续

5、默认继续
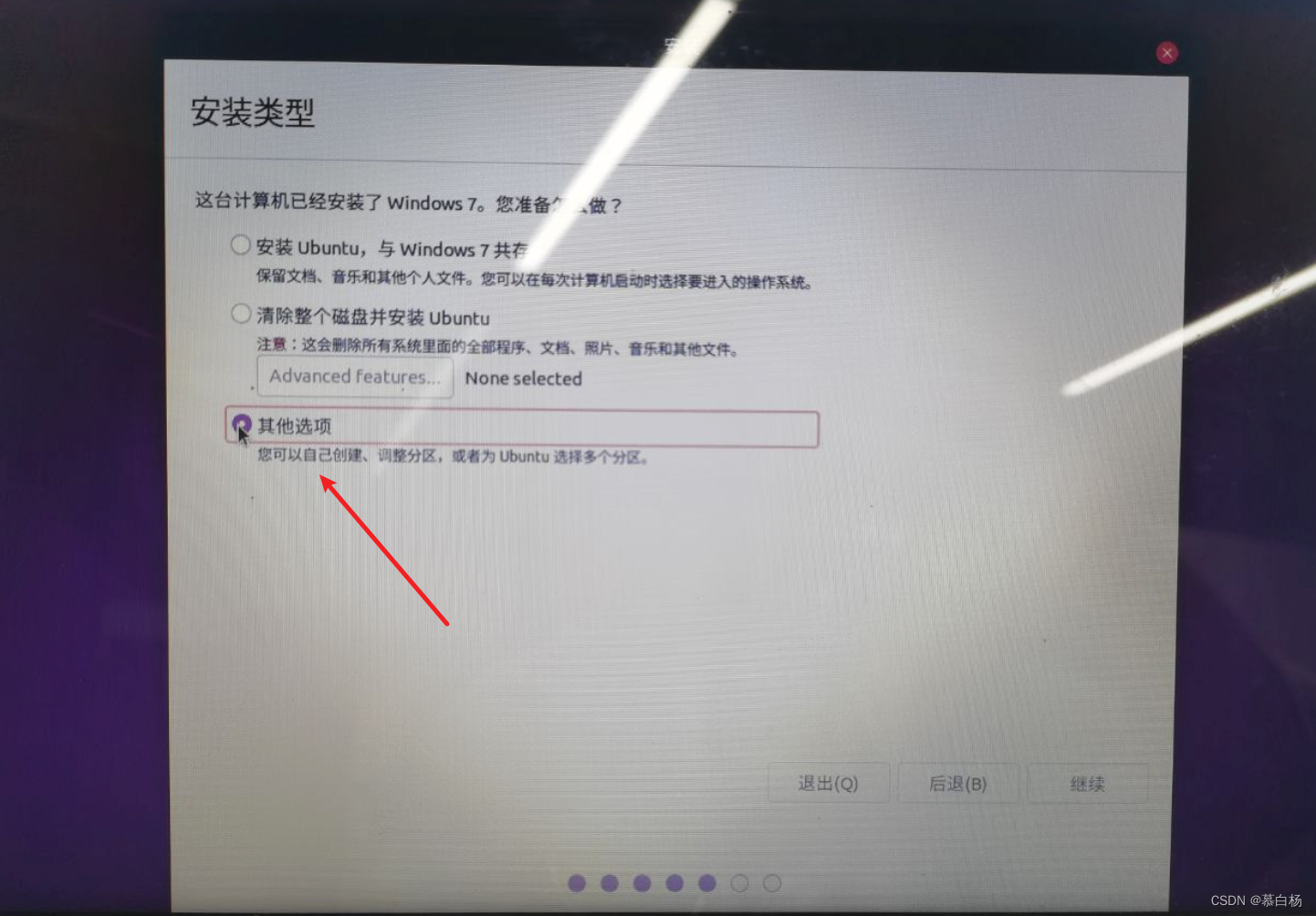
6、选择其他选项,自己进行分区
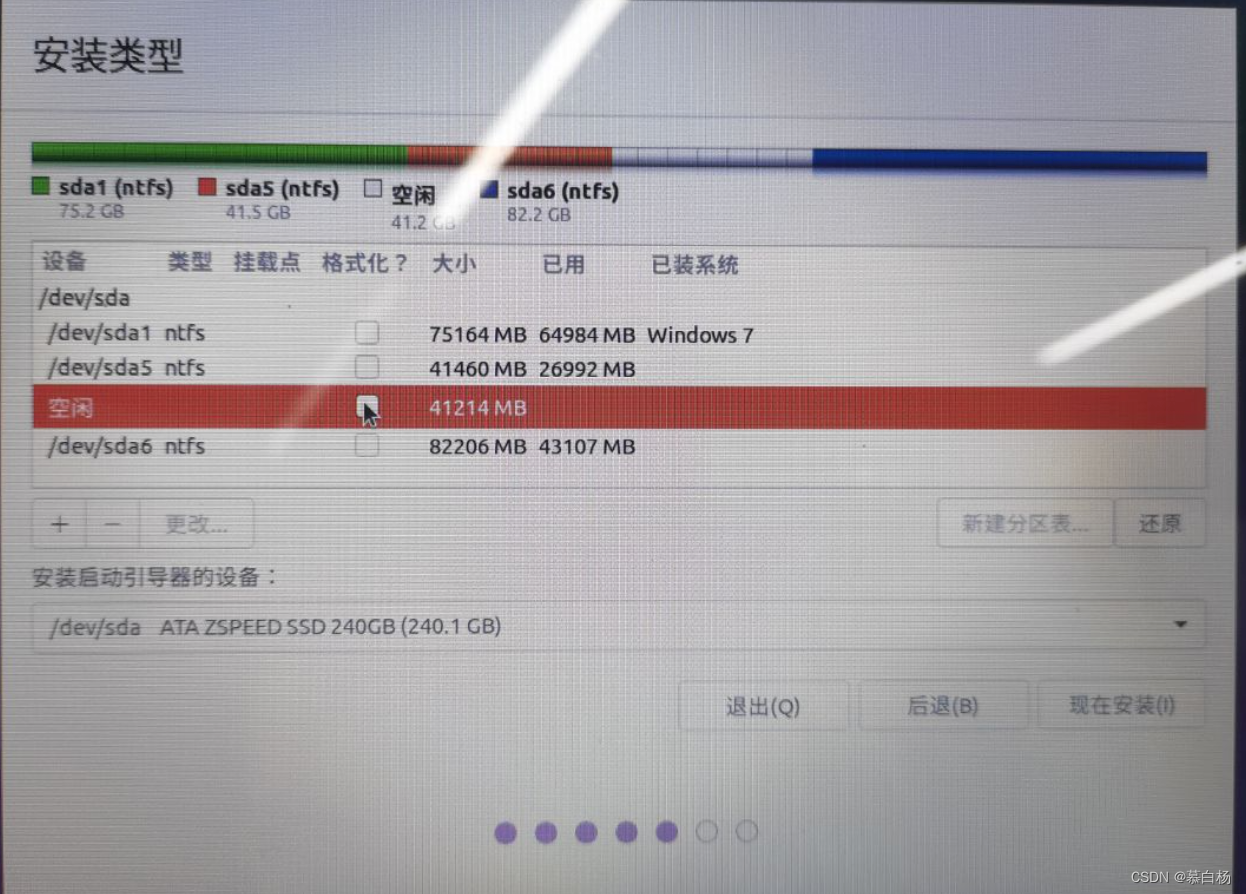
7、分区设置
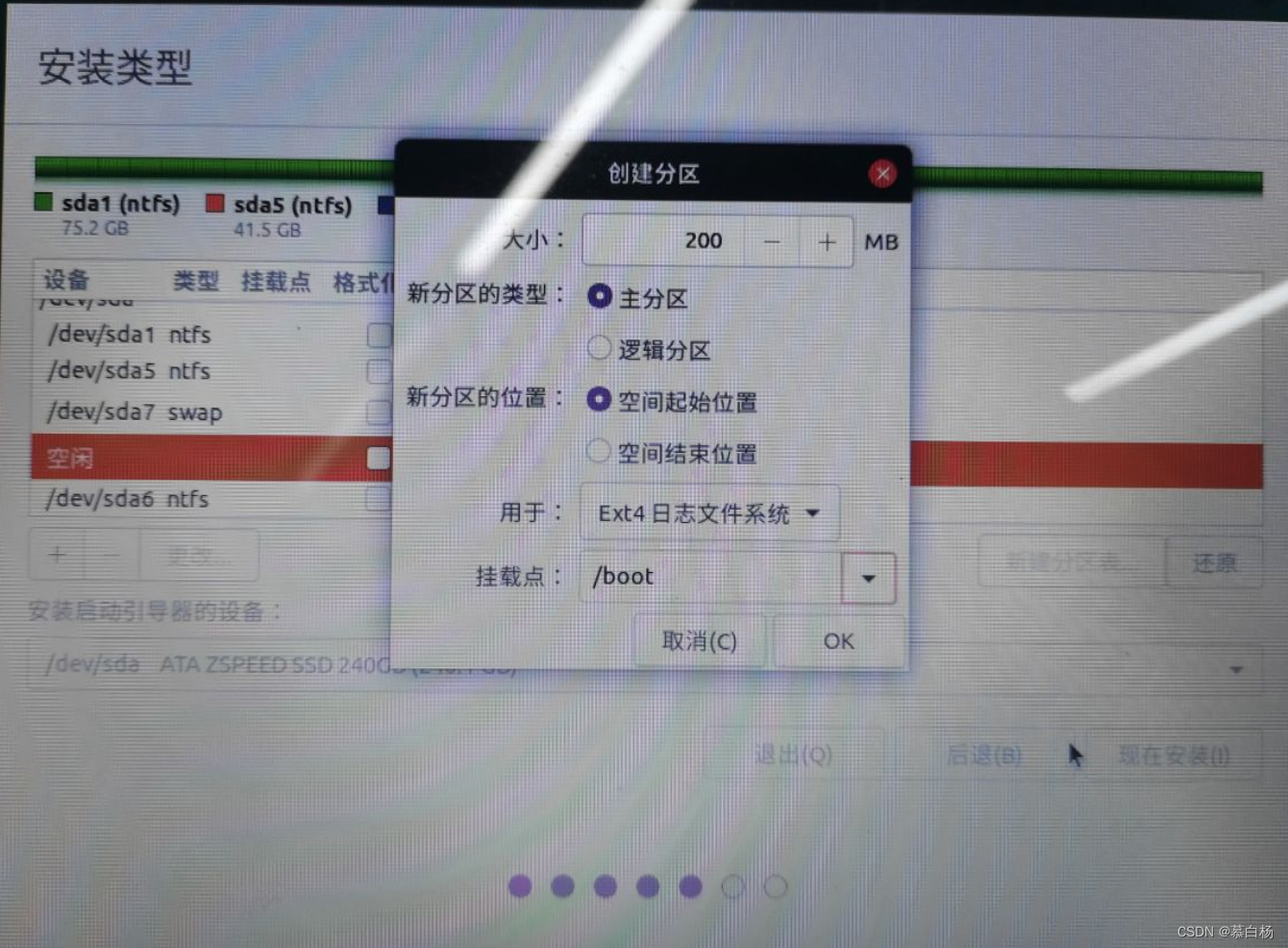
选择空闲分区,就是为Linux系统分配的空间,点击“+”,为Ubuntu进行分区。在Linux系统中每一个硬盘最多有16个分区,这里只新建几个最常用的目录。
swap:交换空间,大小一般为物理内存的大小或者物理内存的两倍

/boot: Linux的内核及引导系统程序所需要的文件,一般设置为200M
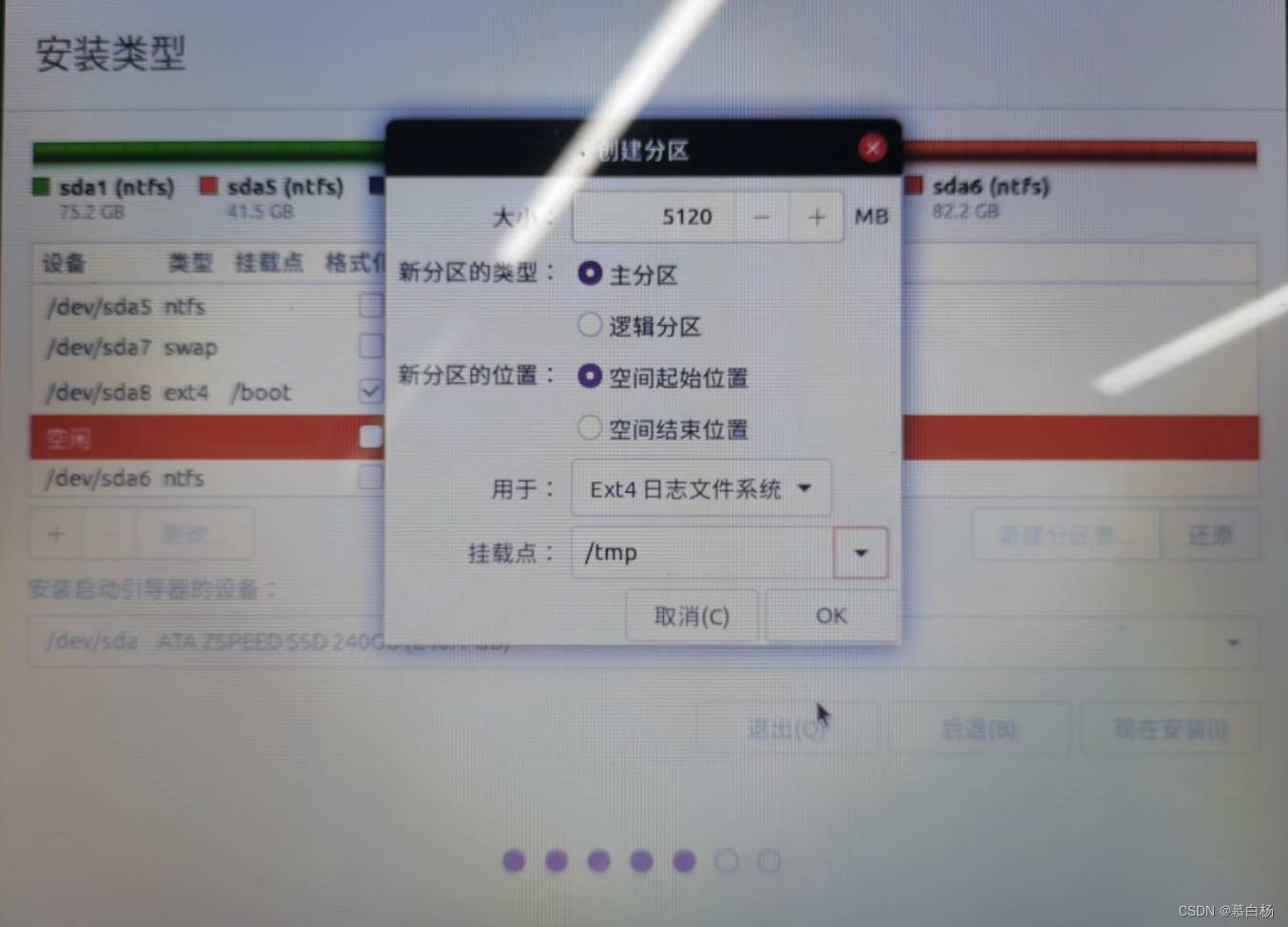
/tmp:系统的临时文件,系统重启时不会保存
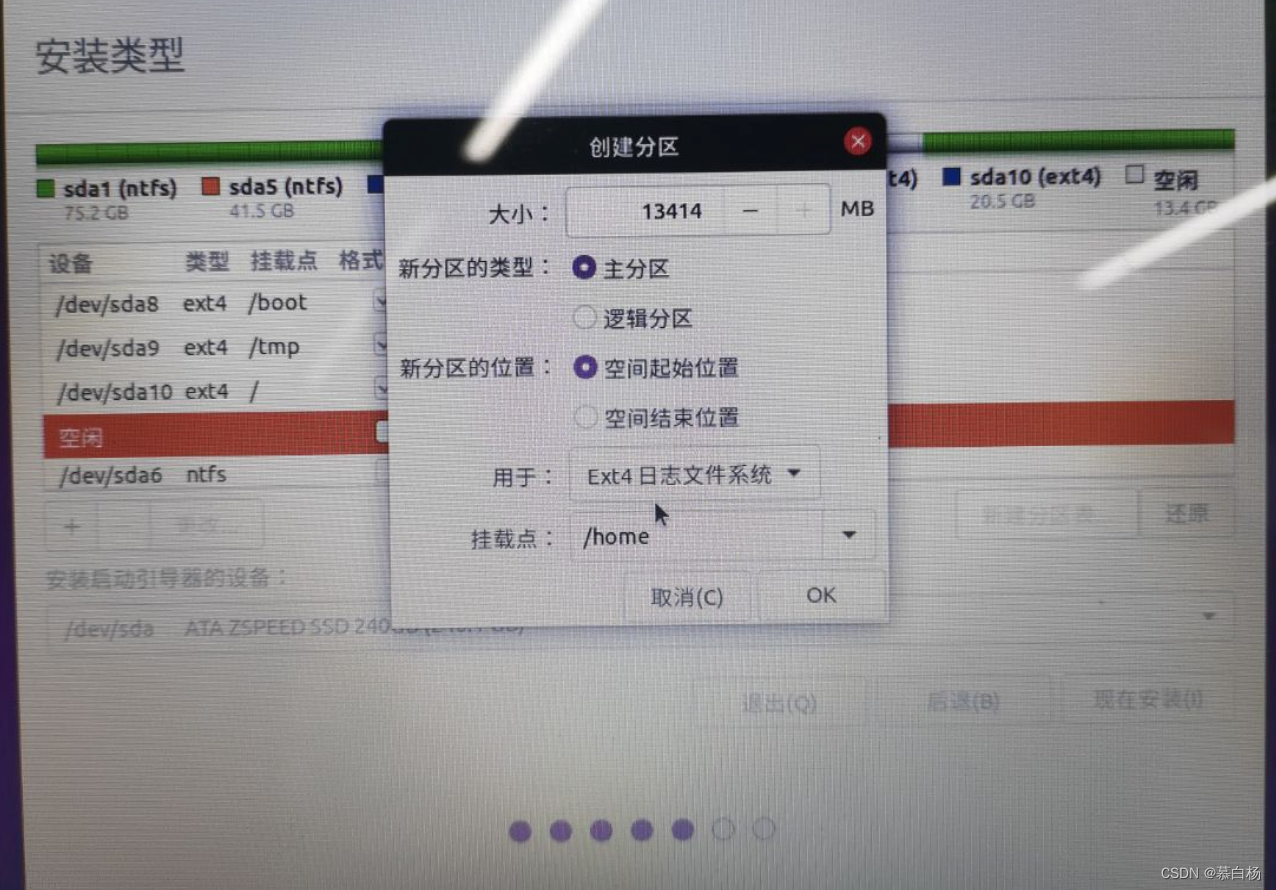
/:根目录,10G-20G

/home:用户工作目录,用来保存文件,将剩余空间都分配
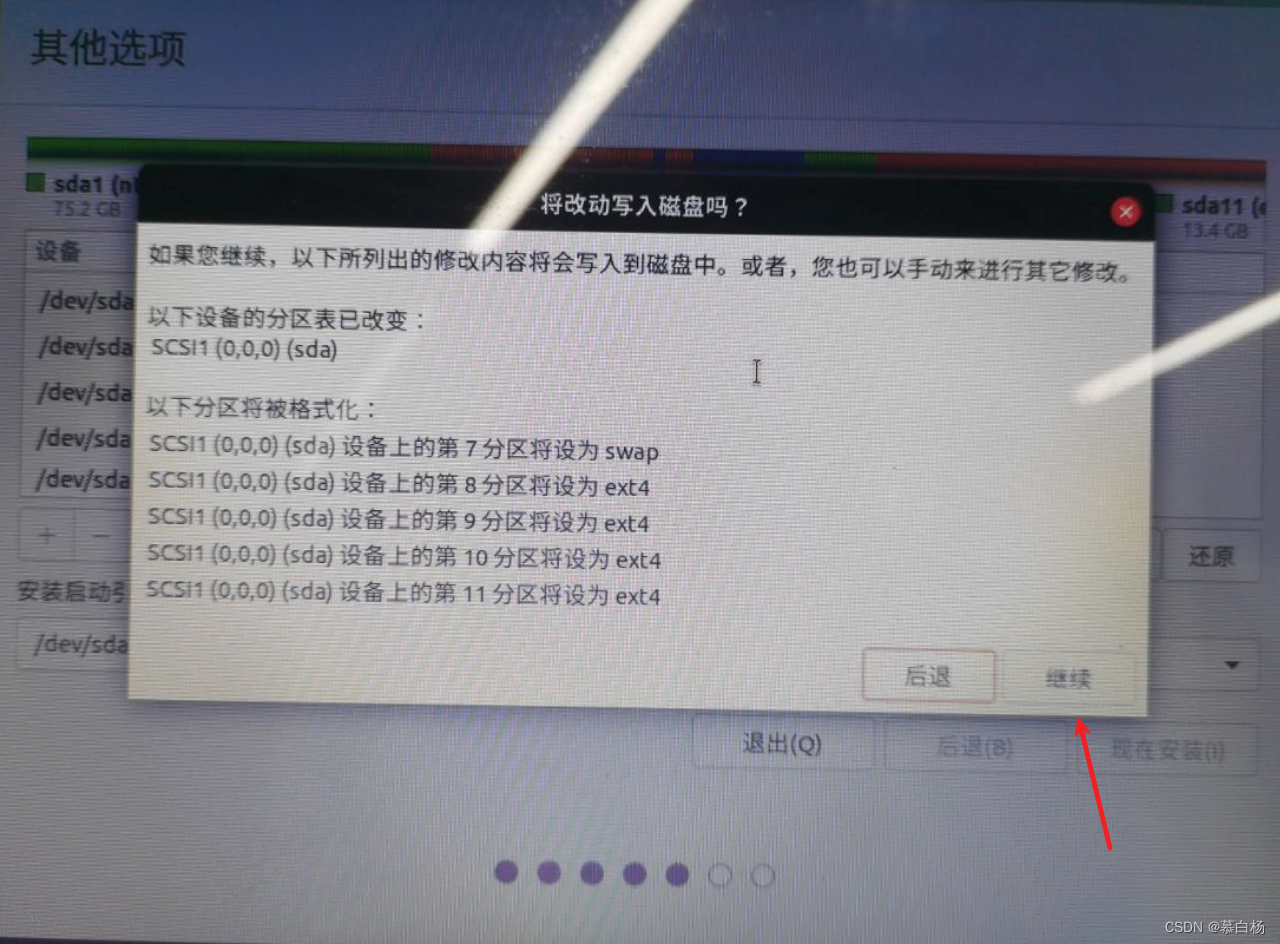
8、分区完成后,点击现在安装,会提示分区已被改写,点击继续,设置所在地方,继续下一步
9、选择地址,shanghai ,点击继续

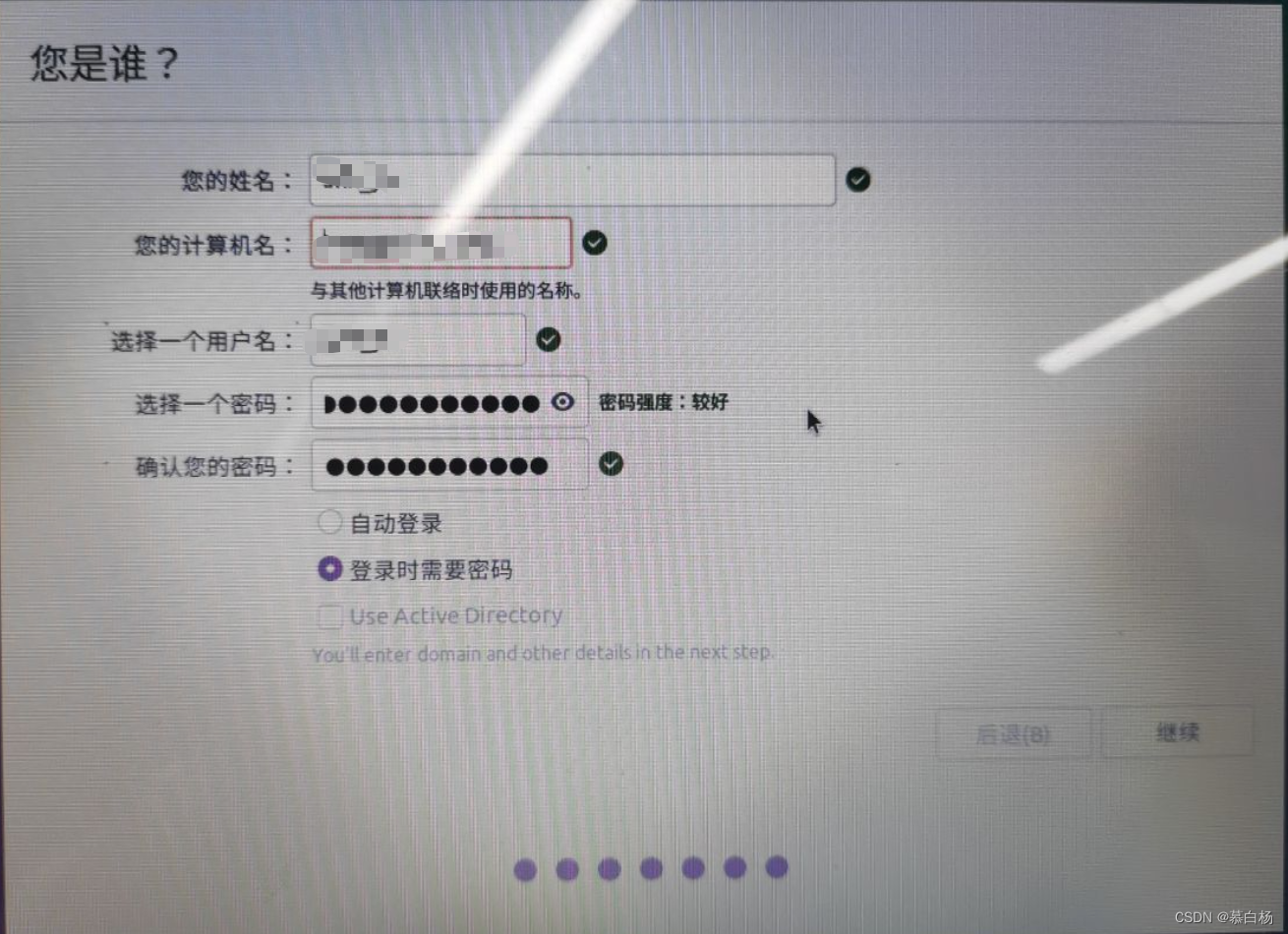
10、用户名和密码设置
设置姓名、计算机名、用户名和密码,点击继续后进入系统安装
11、配置安装

12、安装完成

四、进入系统,配置apt源
重启后就可以选择进入Windows7还是Ubuntu操作系统。
选择进入ubuntu系统,提示输入密码,即可进入系统。
Ubuntu 更换 apt 源为阿里云
1、备份list文件
cd /etc/apt/
sudo cp sources.list sources.list.bak
2、修改list文件
sudo vim sources.list
ps:如果提示vim不是命令的话,可选择用vi
将文件中所有的url地址,全部替换为 http://mirrors.aliyun.com/ubuntu/ 即可。
3、更新软件列表
使用管理员权限,执行命令
sudo apt-get update
sudo apt-get upgrade
PS: apt-get update 是更新软件列表
apt-get upgrade 是更新软件
至此,ubuntu系统的基本配置就完成了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)