很多同学在到手一台或者根据网上教程组装了一台PX4固件的无人机后,最迫切的一件事是否是让无人机解锁飞上蓝天?但就是在这一步却遇到各种各样的问题导致无法解锁而四处查找资料?本文由阿木实验室有多年无人机调试经验的资深调试工程师汇总编辑,扫除您的解锁障碍!
1. 遥控器进行解锁操作,地面站无报错,且无人机无响应。
分析原因:可能为无人机未识别到遥控的解锁信号。
解决办法:查看遥控器是否与无人机上接收机对码,接线是否正确。遥控或接收机的模式是否为SBUS或者PPM,如以上都没问题则重新校准遥控器。
2. 遥控器进行解锁操作,点击箭头所指位置,地面站有如下报错。 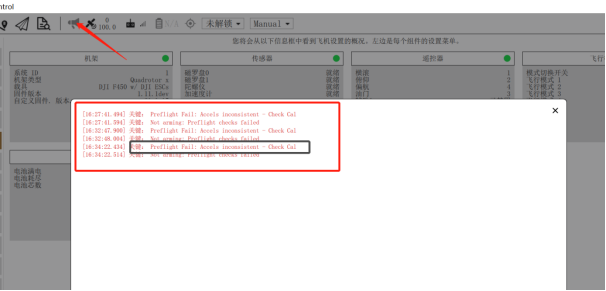 分析原因:根据英文提示,加速度计不一致,这里注意Preflight checks failed译为:起飞前的检查失败,这句报错可以忽略,重点是上面的加速度计一致。
分析原因:根据英文提示,加速度计不一致,这里注意Preflight checks failed译为:起飞前的检查失败,这句报错可以忽略,重点是上面的加速度计一致。
解决办法:校准加速度计,校准加速度计时需要无人机六个面分别向下并保持静止等待校准完成。
3. 遥控器解锁操作,点击箭头所指位置,地面站有如下报错。  分析原因:根据英文提示USB未安全移除, Preflight checks failed译为:起飞前的检查失败,这句报错可以忽略。
分析原因:根据英文提示USB未安全移除, Preflight checks failed译为:起飞前的检查失败,这句报错可以忽略。
解决办法:①拔掉无人机和电脑连接的USB线,再次解锁,②在参数列将此检查禁用,具体方法将下图所示参数修改为197848来禁用掉USB检查。更改后需要点击保存。该参数是为了防止调试人员在调试过程中因误触解锁所导致发生安全事故,所以在桌面调试时请勿安装螺旋桨。 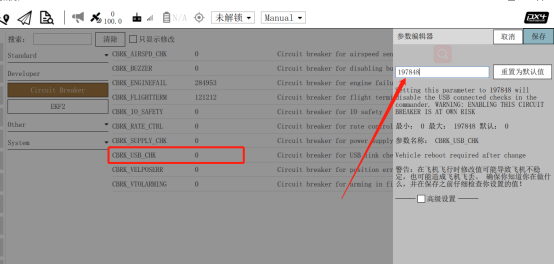
4. 遥控器解锁操作,点击箭头所指位置,地面站有如下报错。  分析原因:根据英文提示请检查电池。
分析原因:根据英文提示请检查电池。
解决办法:检查电池是否连接到无人机,电机电量是否充足。
5. 按下图指示检查无人机地面站显示的电压是否与电池实际电压相同。 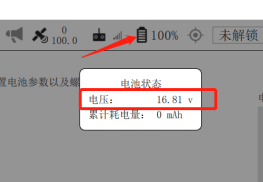 如不相同请按下图操作校准无人机电源:
如不相同请按下图操作校准无人机电源:  先选择电源,在点击计算,在3所指位置填入电池实际电压,在点击4所指计算,等待飞机电压接近测量电压,然后点击关闭即可。
先选择电源,在点击计算,在3所指位置填入电池实际电压,在点击4所指计算,等待飞机电压接近测量电压,然后点击关闭即可。
6. 遥控器解锁操作,点击箭头所指位置,地面站有如下报错:  分析原因:根据英文提示,请先按安全开关。
分析原因:根据英文提示,请先按安全开关。
解决办法:①找到飞控或者gps上有此字样的按键为安全开关,按下会有一段提示音。再次尝试解锁。  ②如未找到类似字样按钮,或者没有安全开关。可以选择在参数列表中禁用安全开关检查操作如下,将该参数设置为22027来禁用安全开关检查。更改后需要点击保存,该参数是为了防止调试人员在调试过程中因误触解锁所导致发生安全事故,所以在桌面调试时请勿安装螺旋桨。
②如未找到类似字样按钮,或者没有安全开关。可以选择在参数列表中禁用安全开关检查操作如下,将该参数设置为22027来禁用安全开关检查。更改后需要点击保存,该参数是为了防止调试人员在调试过程中因误触解锁所导致发生安全事故,所以在桌面调试时请勿安装螺旋桨。 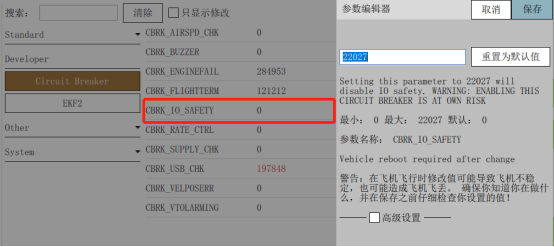
7. 遥控器解锁操作,点击箭头所指位置,地面站有如下报错: 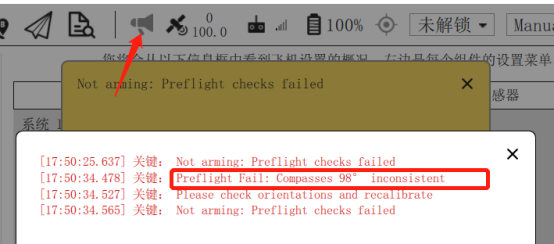 分析原因:根据英文提示,罗盘不一致,这里需要注意飞控和gps中都含有罗盘(指南针)。
分析原因:根据英文提示,罗盘不一致,这里需要注意飞控和gps中都含有罗盘(指南针)。
解决办法:①.查看无人机GPS和飞控安装方向是否一致,无异常则尝试校准飞控罗盘(指南针),按照地面站提示校准罗盘(指南针)。②校准完成后依然无法解锁,则排查周围环境是否存在电磁干扰,或者大片金属。或者更换场地尝试校准。③以上方法都不行则尝试断电后将gps拔掉后重新校准,校准完成后解锁是否报错。排查是否时GPS内的指南针异常。
8. 遥控器解锁操作,点击箭头所指位置,地面站有如下报错: 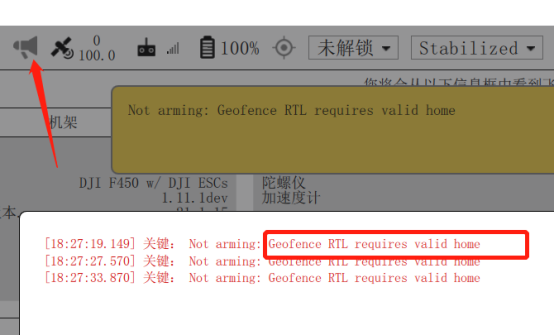 分析原因:根据英文提示返航的无效。
分析原因:根据英文提示返航的无效。
解决办法:①将无人机拿到室外开阔环境gps信号良好的场地飞行。②在室内测试时先将返航设置先关闭,但是室外飞行时请务必打开,关闭操作如下: 选择安全界面,将有Return字样的都改为Disabled,失控、故障等返航功能。注意室外飞行时需要打开失控或故障返航功能。 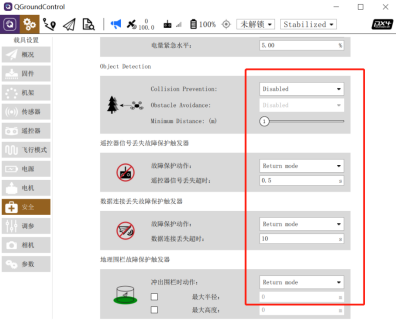
9. 遥控器解锁操作,查看报错信息位置,地面站有如下报错:  分析原因:英文报错为提示GPS位置飘逸过大,能搜索到Gps卫星7颗。
分析原因:英文报错为提示GPS位置飘逸过大,能搜索到Gps卫星7颗。
解决办法:换一个GPS卫星信号良好场地空旷的地方进行飞行测试。
总结
结合调试经验,不能解锁问题大致分为两类:
1,飞控未接受到遥控器的解锁信号,排查方法,查看遥控器和接收机是否对码,接线是否接在正确位置,接收机输入信号是PPM还是SBUS,遥控器是否正确完成校准。
2,飞控接收到解锁信号,解锁前的自检发现存在安全隐患拒绝解锁。则根据报错信息查看相应的传感器是否正常工作或无人机初始配置是否正确。
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)