Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
最简单快速合并B站缓存视频和音频(video.m4s,audio.m4s)
2023-05-16
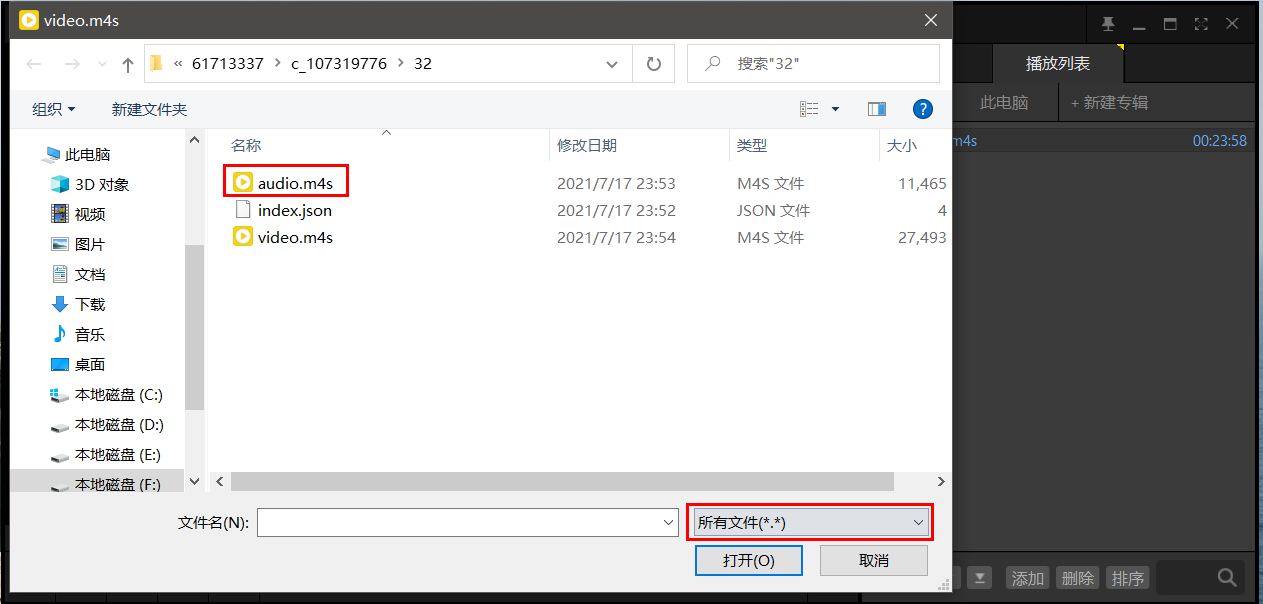
使用PotPlayer播放器可以将两个文件都加载播放
下载安装PotPlayer播放器https://download.csdn.net/download/bao_taotao/20405251
打开video.m4s视频
在视频中右键选择
打开
-
载入音频
-下方文件后缀名选择
所有文件
-选择audio.m4s
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
最简单快速合并B站缓存视频和音频(video.m4s,audio.m4s) 的相关文章
Linux使用graphics.h图形库绘图
graphics h是上古时代C语言程序开发工具Turbo C的图形库 xff0c 主要在Dos环境下使用 在现代图形库的发展下逐渐被淘汰 但是由于其简单和易用 还是有很多的使用价值的 xff0c graphics h具有像素函数 线型函数
软件分享——Bilibili缓存视频合并软件,m4s音视频合并工具
bilibili缓存下来的视频 xff0c 路径android data tv danmaku bili download 此目录是bilibili缓存的视频存放目录 xff0c 是m4s格式的音频和视频文件 xff0c 不能正常播放 你可
linux系统c++使用libjson库
安装libjson开发库 sudo apt get install libjsoncpp dev 测试程式 span class token macro property span class token directive hash sp
linux使用xlib库创建窗口
代码 span class token comment Simple Xlib application drawing a box in a window span span class token macro property span
VC++ GDI绘图操作
文章目录 GDI绘图 DC 获取DC GetDC GetWindowDC函数 BeginPaint 和 EndPaint 函数 DC的释放 HDC和四个DC类 CDC和HDC CPaintDC CClientDC CWindowDC 画笔和
Ubuntu18.04安装Ros Melodic 以及测试rviz
目录 一 检查Cmake版本 二 检查Ros版本 三 下载安装 1 把Unbuntu的软件源更换为国内的软件源 xff0c 这样可以提高下载速度 2 设置公钥并更新最新可用软件包列表 3 安装ROS 4 设置环境变量 5 下载其他功能组件
PixHawk飞控和Mission Planner地面站安装调试
PixHawk飞控和Mission Planner地面站安装调试 教程 F4 V3飞控刷ardupilot固件教程 多旋翼
Ubuntu18.04 + ROS melodic 安装使用 InterRealSenseD435i SDK2和RealSense-ROS以及查看相机内参(吐血整理,踩坑总结)
目录 前言 安装要求 一 安装使用 InterRealSenseD435i SDK2 1 注册服务器的公钥 xff1a 2 将服务器添加到存储库列表中 xff1a 3 安装库 xff1a 4 安装开发者和调试包 xff1a 5 测试SDK2
高翔视觉SLAM十四讲(第二版)各种软件、库安装的以及报错解决方法
目录 前言 系统版本 下载高翔视觉SLAM十四讲第二版的源代码 一 安装 Vim 二 安装 g 43 43 三 安装 KDevelop 以及汉化 1 安装 2 汉化 四 安装 Eigen 库 五 安装 Pangolin 库 六 安装 Sop
Ubuntu18.04 编译 ORB-SLAM2(./build.sh + ./build_ros.sh)完整流程,各种报错处理(踩坑总结)
文章目录 前言系统版本 一 准备工作1 确定是否安装了 C 43 43 11 或者 C 43 43 0x 编译器2 安装 Pangolin 库3 安装 OpenCV 库4 安装 Eigen3 库5 ROS环境6 下载 ORB SLAM2 源
高翔ORB-SLAM2稠密建图编译(添加实时彩色点云地图+保存点云地图)
目录 前言系统版本 一 准备工作下载源码 二 编译 build sh1 删除一些build文件夹2 创建 Vocabulary 文件夹3 在CMakeLists txt中取消编译器的一些设置4 编译5 运行TUM数据集6 实时查看彩色点云地
使用D435i相机跑ORB-SLAM2_RGBD_DENSE_MAP-master稠密建图编译(实时彩色点云地图加回环+保存点云地图)
目录 前言系统版本 一 准备工作下载源码 二 编译 build sh1 删除一些build文件夹2 创建 Vocabulary 文件夹3 编译1 xff09 错误1 4 解决 段错误 xff08 核心已转储 xff09 改动一改动二 5 v
解决intel realsense D435i深度相机没有IMU话题的问题
解决方法1 安装好RealSense ROS驱动后 xff0c 启动相机发现没有imu话题 xff08 Ubuntu18 04 43 ROS melodic 安装使用 InterRealSenseD435i SDK2和RealSense R
使用D435i相机录制数据集跑ORB-SLAM2稠密建图
目录 前言系统版本 一 录制视频二 提取rgb和depth图片1 2 3 三 测试数据集 前言 本文写于2022年7月24日 系统版本 Ubuntu18 04 43 ROS melodic 一 录制视频 这一步需要使用InterRealSe
SLAM数据集TUM,KITTI,EuRoC数据集的下载地址与真实轨迹文件的查找
目录 前言一 TUM数据集1 下载地址2 真实轨迹文件的查找3 轨迹格式 二 KITTI数据集1 下载地址2 真实轨迹文件的查找 三 EuRoC数据集1 下载地址2 真实轨迹文件的查找3 轨迹格式 前言 在SLAM的学习过程中 xff0c
用evo工具分析ORB-SLAM2运行TUM,KITTI,EuRoC数据集轨迹
目录 前言一 evo工具的安装二 运行TUM数据集1 TUM单目数据集2 TUM RGB D数据集 三 运行KITTI数据集1 KITTI单目数据集2 KITTI双目数据集 四 运行EuRoC数据集1 EuRoC单目数据集2 EuRoC双目
镭神16线激光雷达使用
目录 一 创建工作空间二 进入src 下载驱动三 编译四 修改IP五 查看激光雷达点云 一 创建工作空间 span class token function mkdir span p leishen ws src 二 进入src 下载驱动
Ceres Solver使用说明
官方文档 xff1a http www ceres solver org nnls tutorial html robust curve fitting 参考文章 xff1a 一文助你Ceres 入门 Ceres Solver新手向全攻略
利用ROS2实现话题的发布与订阅
目录 1 创建节点2 编写发布与订阅节点2 1 发布节点2 2 订阅节点2 3 修改 96 CmakeLists txt 96 及 96 package xml 96 3 话题发布与订阅运行测试3 1重开一个终端 xff0c 启动订阅节点3
利用ROS2实现串口通信
目录 1 下载虚拟串口模拟器socat2 步骤1 新建一个serial test文件夹2 新建一个cpp header的包3 添加别人的serial头文件与源文件4 修改 96 CmakeLists txt 96 及 96 package
随机推荐
ROS2下使用鱼香ROS的串口通信库完成串口通信
目录 一 安装编译FishProtocol二 ROS2串口例程1 编译运行功能包2 出现的问题3 串口通信 鱼香ROS的串口通信库Github地址 一 安装编译FishProtocol span class token function s
运行D435i相机录制的bag包跑可回环的稠密建图ORB-SLAM2_RGBD_DENSE_MAP-master
目录 前言一 Inter realsense SDK 和 realsense ros驱动话题对比1 查看用Inter realsense SDK录制的bag包话题信息2 查看realsense ros发布的话题信息 二 运行rosbag包
使用D435i相机录制TUM格式的数据集
目录 前言系统版本 一 使用realsense SDK录制bag包的情况1 录制视频2 提取rgb和depth图片1 2 3 对齐时间戳 二 用realsense ros打开相机录制bag包1 将深度图对齐到RGB2 使用realsense
将pcd点云文件转化成可用于路径规划的pgm文件
目录 前言1 下载 96 map server 96 功能包报错1报错2 2 下载代码3 执行代码 xff0c 保存地图4 解决一些问题1 滤波后的点云不是RGB彩色的 前言 在之前的工作中 xff0c 对ORB SLAM2添加了稠密建图
使用MeshLab软件处理pcd点云文件
目录 前言1 安装MeshLab软件2 利用pcl库将pcd文件转成ply文件3 利用MeshLab旋转ply点云4 将ply文件转为pcd文件5 将ply文件转为pcd文件 xff08 添加读取配置文件版本 xff09 前言 在使用D43
用C/C++读取配置文件的小例子
这里提供了一个用C C 43 43 读取配置文件的简单框架 xff0c 具体内容可以依据自己的需要修改 GitHub上面的链接 xff1a https github com YuanpengDuan read config 新建一个文件夹
【python】本地音乐播放器(PyQt5界面版)
大家好 xff0c 近期又学习了新内容 xff0c 所以迫不及待想分享出来 关于python Gui编写的界面版的音乐播放器 xff0c 能实现本地音乐的播放 目录 前期准备 设计界面 功能需求 播放 暂停 播放模式 时长显示 主窗体 打包
清华源无法使用且电脑端切换源失败问题
先换成上图这种清华源 xff0c 但所系统会提示你 xff0c 缓存失败 xff0c 这时候 执行 cd etc apt sudo cp sources list sources list bak sudo gedit sources li
吐血整理,20个计算机保研常见问题及回答模板
写在前面 计算机专业保研中 xff0c 面试是非常关键的环节 xff0c 它能体现同学们的知识储备水平和临场反应能力 xff0c 因此需要我们做好充足的准备 之前岛主给大家整理了 计算机保研面试中的另类问题 xff0c 不少宝宝看完后 xf
正点原子STM32F103(精英版)------PWM输出实验
STM32 PWM 工作过程 STM32 PWM 工作过程 STM32 PWM 工作过程 xff08 通道 1 为例 xff09 CCR1 捕获比较 值 寄存器 xff08 x 61 1 2 3 4 设置比较值 CCMR1 OC1M 2 0
Ubutnu18.04UWB配置串口ttyACM0如何与nassistant连接!
这篇是解决一个ttyACM0串口无法与软件连接的问题 开始我还以为串口没有呢 xff01 因为当我用usb转ttl xff0c 在我装了驱动之后发现没有ttyUSB0 xff0c 但是实际上他是ttyACM0 xff0c 这个怎么讲呢就很玄
C进阶_字符串查找库函数
strstr 查找strstr的文档 xff0c 可知它的原型为 xff1a char strstr const char string const char strCharSet 它的返回值 xff0c 根据文档是这样的 xff1a Re
基于labview的片状物料分拣系统,实现尺寸、形状、颜色、 坐标等的判别,通过串口通信发送到机械臂控制端。
基于labview的片状物料分拣系统 xff0c 实现尺寸 形状 颜色 坐标等的判别 xff0c 通过串口通信发送到机械臂控制端
【常见通讯协议】之IIC
IIC通信协议 IIC总线硬件接线图 SDA SDATA 数据线 SCL SCLOCK 时钟线 一 百度百科介绍 IIC是由NXP xff08 原PHILIPS xff09 公司开发的两线式串行总线 xff0c IIC xff08 Inte
如何使用IDEA创建Servlet程序(不多说一句废话版~)
说一下现在创建Servlet或Web项目和之前 xff08 Eclipse xff09 的主要区别 xff0c 之前是直接创建 xff0c 现在是先要创建Java项目 xff0c 再通过添加支持框架变成Servlet或Web项目 废话不多说
【路径规划】基于麻雀算法SSA解决无人机三维路径规划问题matlab代码
1 简介 SSA主要模拟了麻雀觅食的过程 麻雀觅食过程是发现者 跟随者模型的一种 xff0c 同时还叠加了侦查预警机制 麻雀中容易找到食物的个体作为发现者 xff0c 其他个体作为跟随者 xff0c 同时种群中选取一定比例的个体进行侦查预警
【PID优化】基于灰狼优算法优化分数阶 PD 滑模控制器附matlab代码
作者简介 xff1a 热爱科研的Matlab仿真开发者 xff0c 修心和技术同步精进 xff0c matlab项目合作可私信 x1f34e 个人主页 xff1a Matlab科研工作室 x1f34a 个人信条 xff1a 格物致知 更多M
集群固定翼无人机飞行仿真平台附matlab代码
作者简介 xff1a 热爱科研的Matlab仿真开发者 xff0c 修心和技术同步精进 xff0c matlab项目合作可私信 x1f34e 个人主页 xff1a Matlab科研工作室 x1f34a 个人信条 xff1a 格物致知 内容介
OpenCV是什么?OpenCV是干什么的?OpenCV概述
OpenCV是一种开源计算机视觉库 xff0c 它提供了一些用于处理图像和视频的工具和算法 OpenCV最初是由英特尔公司开发的 xff0c 现在已经成为了一种广泛使用的开源工具 xff0c 它被用于各种各样的计算机视觉应用程序中 xff0
最简单快速合并B站缓存视频和音频(video.m4s,audio.m4s)
使用PotPlayer播放器可以将两个文件都加载播放 下载安装PotPlayer播放器https download csdn net download bao taotao 20405251打开video m4s视频在视频中右键选择打开 载
热门标签
tablesaw
cula
offlinejs
libpqxx
usertype
ibmdoors
remixrun
log4jsnode
fontlock
webmidi
friendlyid
nexus4
sicm
jasmine20
podfile
bimap