久违的一篇博客,说实话CSDN的编辑器还是用不太习惯,记录一下树莓派安装Ubuntu 18.04 +桌面desktop + ros的安装。小白一只,Linux的命令都不知道几个。崩溃,崩溃,还是崩溃。安装这些也太难了,最后也不够完美,就这也tm不吃不喝差点不睡安装了2天1夜,各种bug,各种被挂,各种各种,难受。就在这网络发达的时代,还这样,很难想象自己安装树莓派的这些东西,一辈子估计都安装不上,谢谢分享安装经验的各位博主。建议学习ubuntu和ros自己买个迷你电脑吧,比树莓派便宜也好安装,想玩一玩的可看一下我的安装过程,总之各种bug几乎都遇到了,最后的图形化窗口连接WIFI还没解决,就这样吧,有ros了还期望啥。
安装 Ubuntu 18.04 LTS
直接参考这位知乎博主的文章即可,我只说bug和小问题,应为小白遇到问题多(链接是一样的)。
链接: link
感谢这位博主。按照这位博主的文章一直到配置WIFI 的部分即可。
https://zhuanlan.zhihu.com/p/383931221
注意选择使用自定义镜像即可。
WIFI部分就是该博主强调的使用笔记本电脑设置WIFI。
修改密码这,自己弄了好长时间。ubuntu密码看不见,重复密码和初始密码这位博主都说了,然后是unix密码同样是初始密码。ubuntu默认不打开小键盘,所以建议新密码全是字母,不全是字母图形化的ubuntu输入密码不对,自己百度了好久才查到的,然后就是重装ubuntu,大哭。这里重复了好几次。
安装图形化窗口和ros遇到的问题
图形化窗口准备工作
命令都不难搜索到,但是国内网络被屏蔽,必须挂代理,这是最难的,下面说一下遇到的具体问题。
首先还是上个博主说的:
ssh 树莓派的账号名称@树莓派的ip地址
ssh ubuntu@192.168.xxx.xxx #举例说明
sudo vim /etc/apt/sources.list
首先还是上个博主说的这个,到更换下载源,使用的是vim建议命令中的vim改为nano,使用替换功能在文本中进行替换更加方便(crtl+\)。有能力使用电脑远程操控树莓派的就不用这么麻烦了,本人没弄出来,所以用的是nano。然后在CSDN中搜索怎么输入命令,这个挂载代理实测好用!!!
sudo nano /etc/apt/sources.list
换源之后,执行以下两行命令:
sudo apt update
sudo apt upgrade
buntu@ubuntu:~$ sudo apt upgrade
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarily unavailable)
E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is another process using it?
这位博主说:这个错误出现了两次,根据两次文件名称,进行两次删除之后,该命令就可以正确执行了。但是后面会出现一大堆关于apt和apt-get的问题。
apt找到或者损坏 ERROR: unable to process source [https://raw.githubusercontent.com/
首先是:
Unmet dependencies. Try ‘apt --fix-broken install’ with no packages (or specify a solution)
Unmet dependencies. Try ‘apt --fix-broken install’ with no packages (or specify a solution)
解决方法如下(链接是一样的),只能说是可行。
链接: link
https://blog.csdn.net/weixin_38556197/article/details/121453178?spm=1001.2014.3001.5506
最好的解决方法是,下面这种,也就是重新装apt
关于rosdep update被挂
我最好的建议是下面这个网址的解决方法,真的牛皮。解决方法如下(链接是一样的),鱼哥牛的很。
链接: link
rosdep update
https://mp.weixin.qq.com/s/VGs8oWdhHH6XsHcx21lN4Q
下面这个解决方法只能说是一般
https://blog.csdn.net/czsnooker/article/details/120058151
pip 没有怎么办
解决方法如下(链接和网址是一样的):链接: link
链接: link
https://blog.csdn.net/hhhuua/article/details/80995339
https://blog.csdn.net/weixin_42188287/article/details/108961296
#no passwd entry for user
使用超级用户
sudo apt-get
su切换root用户时出现问题(没设置root初始密码)
sudo passwd root
后依次输入密码即可
su
回车进入超级用户强制删除、修改或执行指令。
su ubuntu(用户名,我的用户名没有修改)
同样用这个方法强制,执行删除命令。linux安装软件问题解决(E: Could not open lock file /var/lib/dpkg/lock-frontend - open (13: Permission de)
https://blog.csdn.net/weixin_56881740/article/details/125465340
解决方法如下(链接和网址是一样的):链接: link
https://blog.csdn.net/weixin_56881740/article/details/125465340
apt-get install 出现错误的解决办法 E: Sub-process /usr/bin/dpkg returned an error code (1)解决办法
https://blog.csdn.net/stickmangod/article/details/85316142/
解决方法如下(链接和网址是一样的):链接: link
https://blog.csdn.net/lianshaohua/article/details/109072752
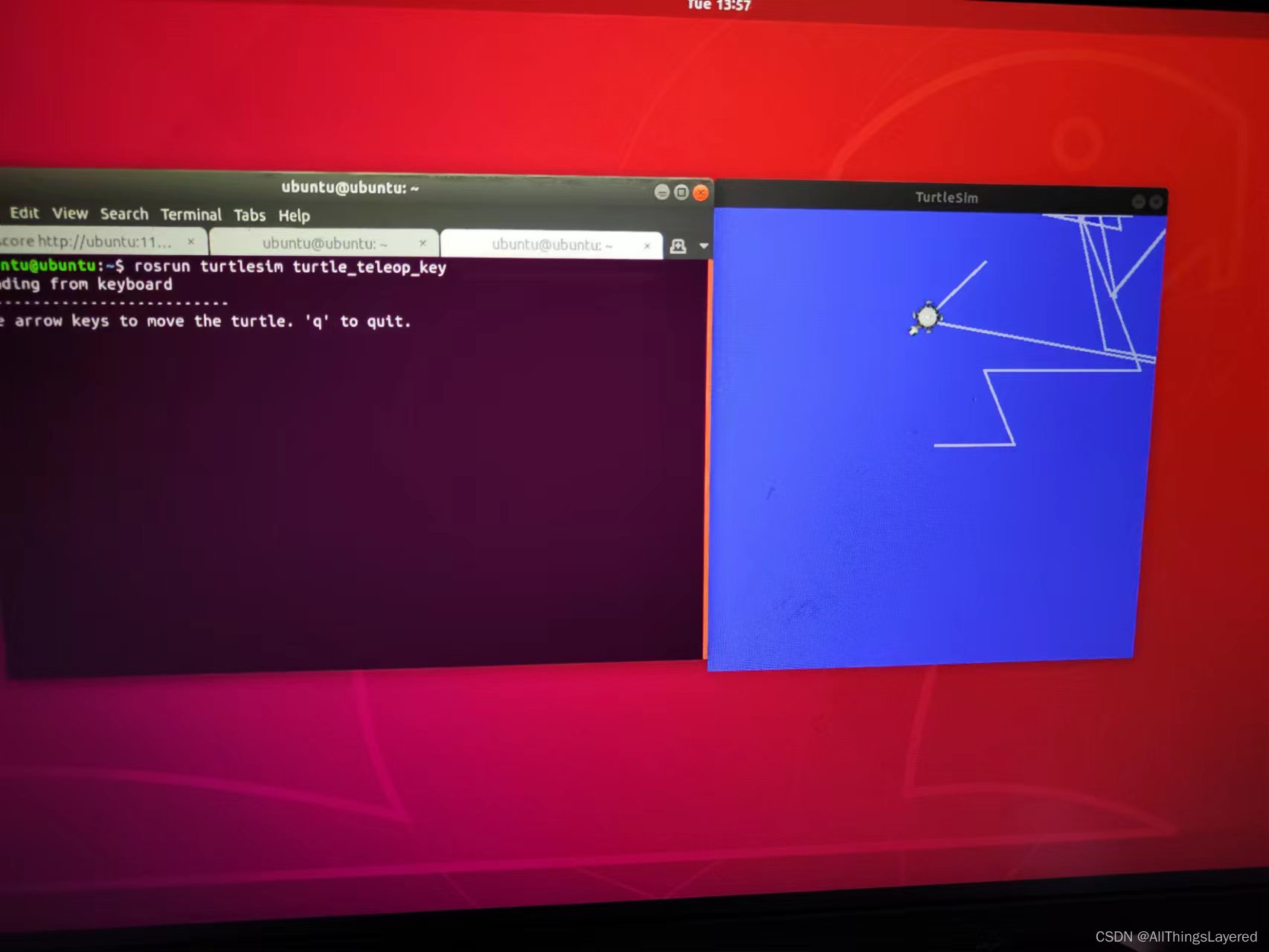
ros安装和乌龟显示
安装方法如下(链接是一样的),也说了一些问题的解决方法,但是还不足以解决我的bug,具体问题还要自己百度或者看一下我整理的问题解决方法。
这篇博文看到,安装ROS编辑器 Roboware之前即可。
链接: link
https://blog.csdn.net/weixin_43924621/article/details/108610476
乌龟显示,链接和网址是一样的):链接: link
https://blog.csdn.net/qq_44830040/article/details/106049992
一定是打开三个命令窗口,ctrl+shift+T出现新的窗口,这是我装好的。
最后求大佬告诉一下图形化后怎么连接WIFI,试了好多网上的解决方法都不行。
树莓派真的垃圾,这么多bug,不能好好弄一下,这不增加了入门难度。自己的操作系统还可以。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)