0. 简介
参数分离对于绝大多数算法开发来说收益是非常大的,因为我们都知道,随着平台的更替,很多时候如果说数据流和算法交叠在一起(即接口与实现合在一起)。这将有可能会导致在迁移平台时候会导致代码难以维护,并有可能会造成莫名的Bug。为了使代码更易于维护和扩展,在修改通信接口时不需要修改相关的算法代码,本文的下面将会介绍几种常用的方法。
1. 通过动态链接库完成链接
动态链接库(Dynamic Link Library,简称DLL)是一种在操作系统中用于共享代码和数据的机制。它是一种可执行的二进制文件,可以被多个程序同时使用,以提高代码的重用性和模块化程度。在C++算法分离中,动态链接库可以用于将算法代码从应用程序中分离出来,使得算法可以独立开发、测试和优化,同时也方便应用程序的调用和升级。
使用动态链接库可以使得算法代码和应用程序代码分别编译和链接,从而实现分离。这样一来,算法代码的修改和升级不会对应用程序造成影响,而应用程序也不必重新编译和链接。动态链接库还可以提高代码的重用性和可维护性,因为同一份动态链接库可以被多个应用程序使用,而且如果需要更新动态链接库,只需替换原文件即可。
对于动态链接库来说,主要分成两步。首先,需要在算法代码中明确定义导出函数(Export Function),以供应用程序调用。
比如说我们会创建一个函数my_pack_test.cpp
#include <stdio.h>
void foobar(int i)
{
printf("Printing from my_pack_test.so %d\n", i);
}
CMakeList.txt
include_directories(../include)
add_library(my_pack_test
SHARED
my_pack_test.cpp
)
target_link_libraries(testJni /home/lib/libgdal.so)
install(TARGETS my_pack_test LIBRARY DESTINATION lib)
这样我们就可以生成一个.so文件了。然后我们就需要在应用程序中使用动态链接库的导入函数(Import Function),以便在程序运行时动态加载动态链接库,并调用其中的算法函数。最后,需要将动态链接库文件放置在应用程序能够搜索到的路径下,以便程序能够找到它。
#include <iostream>
#include "mytool.h"
#ifdef _WIN32
#include <windows.h>
#else
#include <dlfcn.h> # in linux, should also link to dl system library when build
#endif
typedef MyTool *(*CreateMyToolFunc)();
#ifdef _WIN32
HINSTANCE gDllHandler = nullptr;
const char *gDefaultSharedLibPath = "mytool.dll";
#else
void *gSoHandler = nullptr;
const char *gDefaultSharedLibPath = "libmytool.so";
#endif
int main()
{
#ifdef _WIN32
gDllHandler = LoadLibrary(gDefaultSharedLibPath);
if (!gDllHandler)
std::cout << "load shared lib failed" << std::endl;
CreateMyToolFunc create_mytool = (CreateMyToolFunc)(GetProcAddress(gDllHandler, "CreateMyTool"));
MyTool *my_tool = create_mytool();
my_tool->fun1();
int z = my_tool->fun2(2, 3);
printf("z: %d", z);
FreeLibrary(gDllHandler);
gDllHandler = nullptr;
#else
gSoHandler = dlopen(gDefaultSharedLibPath, RTLD_LAZY);
if (!gSoHandler)
std::cout << "load shared lib failed" << std::endl;
CreateMyToolFunc create_mytool = (CreateMyToolFunc)(dlsym(gSoHandler, "CreateMyTool"));
MyTool *my_tool = create_mytool();
my_tool->fun1();
int z = my_tool->fun2(2, 3);
printf("z: %d", z);
dlclose(gSoHandler);
gSoHandler = nullptr;
#endif
return 0;
}
dlopen:该函数将打开一个新库,并把它装入内存。该函数主要用来加载库中的符号,这些符号在编译的时候是不知道的。这种机制使得在系统中添加或者删除一个模块时,都不需要重新进行编译。
dlsym:在打开的动态库中查找符号的值。
dlclose:关闭动态库。
dlerror:返回一个描述最后一次调用dlopen、dlsym,或dlclose的错误信息的字符串。
2. 通过进程完成链接
2.1 fork()完成子进程和父进程的操作
pid_t fork(void);
0: 子进程
子进程PID(大于0的整数):父进程
-1: 出错
使用fork函数得到的子进程从父进程的继承了整个进程的地址空间,包括:
进程上下文、进程堆栈、内存信息、打开的文件描述符、信号控制设置、进程优先级、进程组号、当前工作目录、根目录、资源限制、控制终端等。
子进程与父进程的区别在于:
1、父进程设置的锁,子进程不继承(因为如果是排它锁,被继承的话,矛盾了)
2、各自的进程ID和父进程ID不同
3、子进程的未决告警被清除;
4、子进程的未决信号集设置为空集
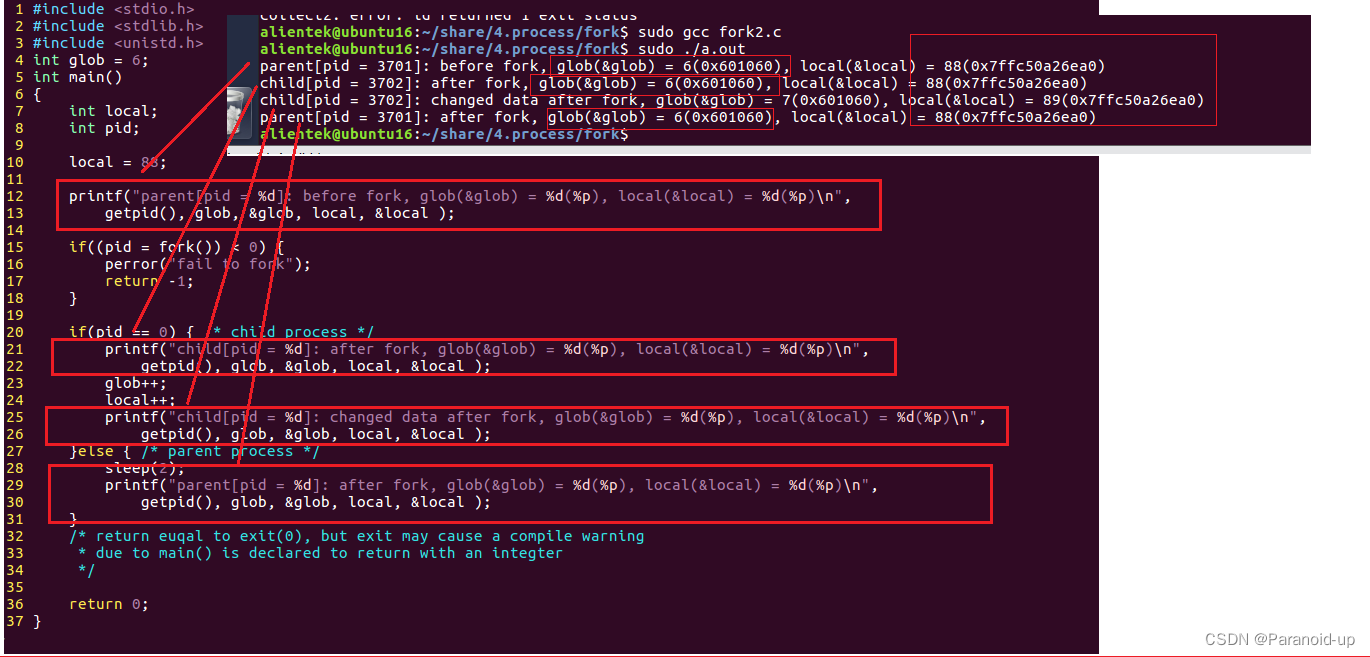
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int glob = 6;
int main()
{
int local;
int pid;
local = 88;
printf("parent[pid = %d]: before fork, glob(&glob) = %d(%p), local(&local) = %d(%p)\n",
getpid(), glob, &glob, local, &local );
if((pid = fork()) < 0) {
perror("fail to fork");
return -1;
}
if(pid == 0) {
printf("child[pid = %d]: after fork, glob(&glob) = %d(%p), local(&local) = %d(%p)\n",
getpid(), glob, &glob, local, &local );
glob++;
local++;
printf("child[pid = %d]: changed data after fork, glob(&glob) = %d(%p), local(&local) = %d(%p)\n",
getpid(), glob, &glob, local, &local );
}else {
sleep(2);
printf("parent[pid = %d]: after fork, glob(&glob) = %d(%p), local(&local) = %d(%p)\n",
getpid(), glob, &glob, local, &local );
}
return 0;
}
2.2 exec函数族
…详情请参照古月居
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)