ROS与arduino的通讯使用了ros_arduino_bridge,代码也是根据学校师兄的代码进行修改的,师兄说直接烧录就可以使用了但我还是遇到了很多问题,Debug的很难受,以下操作仅供参考,需要根据实际情况自行调整
L298N的使用
连接方式
- 不调速:直接与IN1、IN2连接,ENA、ENB键帽不动(键帽的作用是让ENA、ENB默认与5V连接,这样才能驱动电机转动,只有ENA、ENB处于高电平时对应的电机才能转动)
- 调速:IN1.2.3.4与arduino连接后,将ENA、ENB在IN平行一侧的针脚与arduino的PWM输出引脚连接,对ENA和ENB使能端输入PWM脉冲
- 也有文章说可以直接arduino的pwm输出直接连接IN1、IN2来调速,但是在多次尝试后发现不行
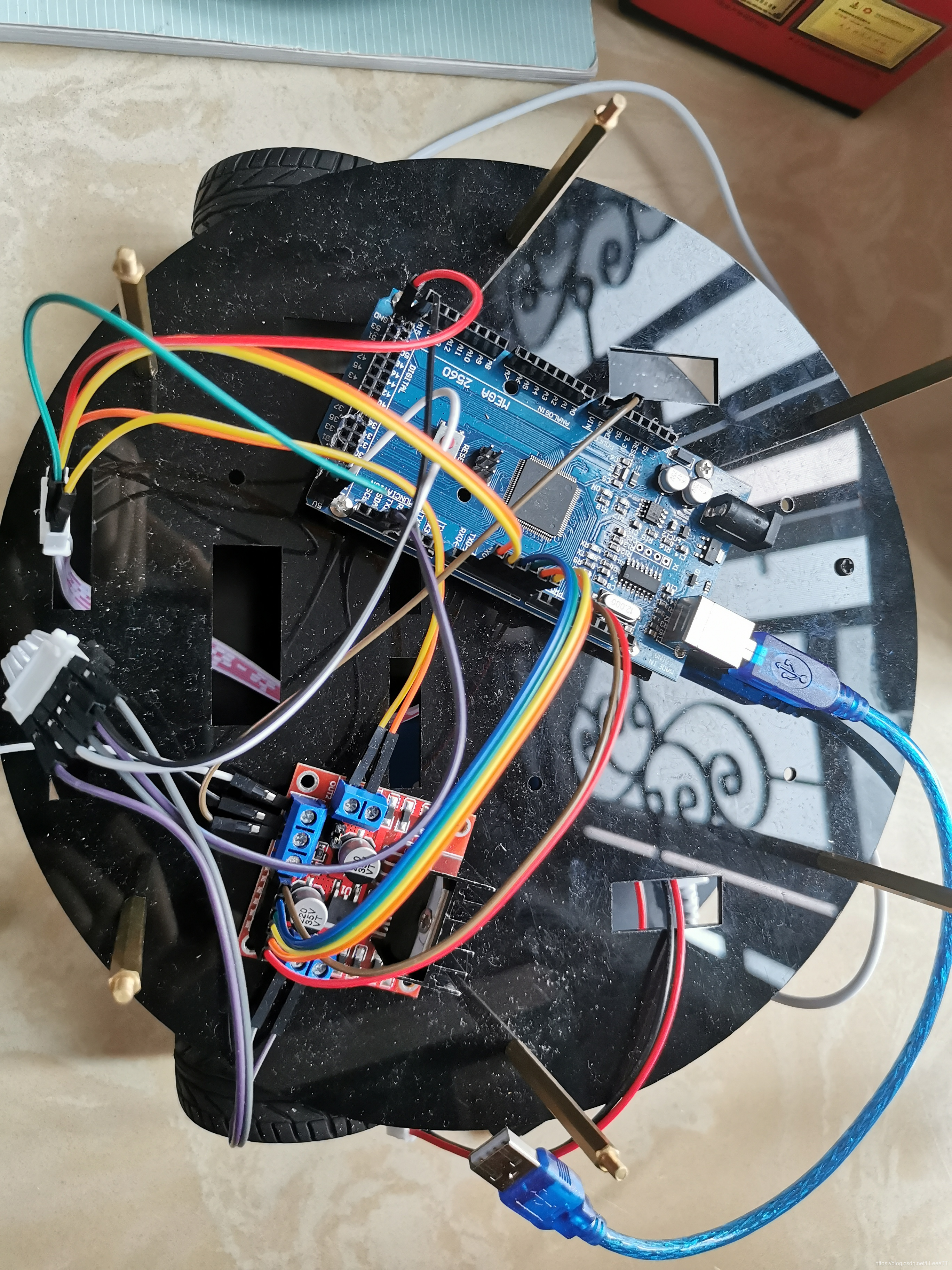
与arduino的连接
这里要注意L298N与arduino一定要共地,直接GND与arduino的GND连接,调试的时候可以将L298N的5V口与arduino连接供电(因为供电口键帽没有拔掉的时候5V可以用来输出)
附上接线部分代码
//电机定义,ENCODER_1代表编码器正极,A标号为左侧电机
#define PWMA 10
#define AIN1 4
#define AIN2 5
#define AENCODER_1 3 //INT1--中断号 只能读取B相的
#define AENCODER_2 2 //INT0
#define PWMB 11
#define BIN1 6
#define BIN2 7
#define BENCODER_1 18 //INT5
#define BENCODER_2 19 //INT4
//需要注意arduino mega的中断引脚以及引脚号,后边会用到,如果进行修改的话需要按照自己的接线来修改
arduino
使用mega的原因如下
- 引脚比较多,也是ros_arduino_bridge原代码中使用的板子
- 中断引脚比较多,将来如果要做四轮或者三轮小车可以使用
- 电源引脚也比较多,不用在外部焊接排针
注:原版比较贵,这里我用的是国产板
已经将代码上传到github上,同步进行更新,文末附带连接,下边说明一下代码(代码中已经有大量注释,这里只讲一些自己觉得重要的)以及项目进行过程中遇到的问题,有遇到相同问题的小伙伴可以一起讨论
- 代码中使用了大量的宏定义,阅读代码时需要留意这部分代码,上下文结合
- communication这部分是上下位机通讯用的,可以根据自己需要进行修改
- 中断:中断这个地方有个隐藏技巧,因为编码器的正负极的方向是一样的,但是装到轮子上后就是方向相反的了,所以如果编码器1进入正极引脚对应的中断,那么编码器2就进入负极对应的中断,这样做当机器人向某个方向走的时候,才能两个编码器同时进入中断。如果都让两个编码器的正极对应的线进入中断,那么前几个数值可能会有正负值跳变
- pid调试:这里可以参考这篇文章,不过ros_arduino_bridge的pid代码感觉有点奇怪,因为我曾经遇到一个问题,不上电的时候,pid.out会慢慢增加到255,全速转动,推测是pid问题
代码:https://github.com/LinErTe/roscar
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)