技术交流:zinghd@163.com,757012902@qq.com
转载标明出处,欢迎转载,因为都是自己的想法,不一定都是对的,欢迎讨论,哪有问题欢迎指点。
2017/10/26更新 之前写的有点小问题,赶紧修改一下
之前的问题是控制模式无法切换,现在可以切换,现在的问题是效果不好,定点的飘移范围有点大,推开之后无法回到原点。
经过分析,原因1:光流的位置估计不够精确
原因2:位置控制算法中速度内环有PID,外环只有I(目前把外环加上I效果也不好,参数需要调节)
到了不得不看算法了,于是找到了包神的博客http://blog.sina.com.cn/s/blog_8fe4f2f40102wo50.html
估计高度的过程和估计x,y轴的思路是一模一样的,位置用的是光流和加速度计的数据。整个过程包神解读的很清楚。
还有陈哥的博客http://blog.csdn.net/czyv587/article/details/51884052
但是没有人详解算法吗?
包神高冷的结尾:预测函数很好理解,但是校正函数是根据什么理论推导出来的?目前尚不清楚。
没办法 我只能拿起了纸和笔
原程序的两个算法
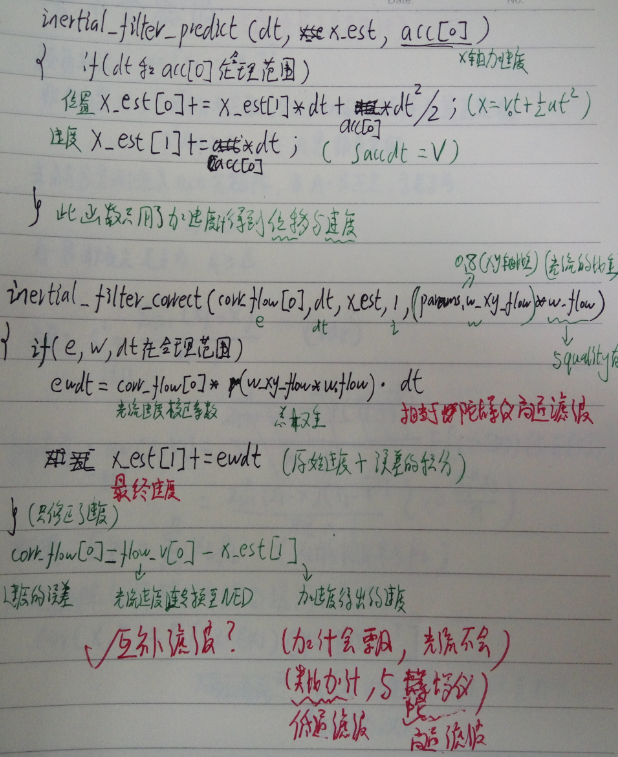
预测函数
void inertial_filter_predict(float dt, float x[2], float acc)
{
if (isfinite(dt))
{
if (!isfinite(acc)) {acc = 0.0f;}
x[0] += x[1] * dt + acc * dt * dt / 2.0f;
x[1] += acc * dt;
}
}
校正函数
void inertial_filter_correct(float e, float dt, float x[2], int i, float w)
{
if (isfinite(e) && isfinite(w) && isfinite(dt)) {
float ewdt = e * w * dt;
x[i] += ewdt;
if (i == 0) {
x[1] += w * ewdt;
}
}
}
预测函数其实是建立一个模型进行估计
通过用物理模型得到当前的预测值
x[0] += x[1] * dt + acc * dt * dt / 2.0f; (v=v0*t+a*t^2)
x[1] += acc * dt;(v=加速度的积分)
校正函数其实是通过测量值来校正预测值
跟卡尔曼滤波的思路一样
就是把实测值(光流传感器出来的速度)和估计值(通过公式得来的速度)比较一下,如果估计值比测量值小,那就把估计值加上他们之间的偏差作为新的估计值,当然前面要加个系数,就是我们前面说的加权系数,这个地方我要写个公式,因为很简单就能说明白。
比如我们的观查值是Z,估计值是X, 那么新的估计值就应该是 Xnew = X + K (
Z-X),从这个公式可以看到,如果X估计小了,那么新的估计值会加上一个量K ( Z-X),
如果估计值大了,大过Z了,那么新的估计值就会减去一个量K (
Z-X),这就保证新的估计值一定比现在的准确,一次一次递归下去就会越来越准却了,当然这里面很有作用的也是这个K,也就是我们前面说的权值,书上都把他叫卡尔曼增益。。。(Xnew
= X + K ( Z-X) = X ×(1-K) + KZ ,也就是说估计值X的权值是1-k,而观察值Z的权值是k,究竟k 取多大,全看估计值和观察值以前的表现,也就是他们的方差情况了。
http://blog.csdn.net/mangzuo/article/details/71171137
函数原型
x[i] += ewdt;(预测函数带入的i=1)
x[1]+=(flow_v[0]-x_est[1])*w(权重)*dt
x[1]=x[1]+(flow_v[0]-x_est[1])* K(系数)
x[1]得到的就是数度的估计值x_est[1](t+1)
x_est[1](t+1)=x_est[1](t)+K*flow_v[0](t)-K*x_est[1](t)
x_est[1](t+1)=(1-k)*x_est[1](t)+K*flow_v[0](t)
当前估计值=上次的估计值*(1-k)+当前测量值*k
这个加权思想 和卡尔曼一样 (知乎的大神们经常说互补滤波是固定增益的卡尔曼滤波)
http://bilgin.esme.org/BitsAndBytes/KalmanFilterforDummies

是个系数不变的加权,确实还是互补滤波的模式
(
这段之前写的不太对请乎略
原来是互补滤波,为什么是互补滤波?
先看珞石的博客http://blog.csdn.net/luoshi006/article/details/51513580
http://blog.csdn.net/luoshi006/article/details/51459884
姿态控制里的互补滤波大家比较清楚了,来类比一下
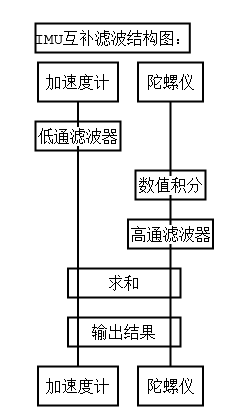
在姿态里,加速度计用重力加速度作为标准,通过PI来去除误差,因为加速度计的干扰是高频的,所以PI的作用相当于是低通滤波器。
在位置估计里,用的就是这个处理好的加速度,来得到速度。
在看位置估计的,第二的函数,用光流数据得到速度,
第一句微分(float ewdt = e * w * dt);就是高通滤波,
为什么呢?大家参考电路里微分电路,就是高通滤波器。
然后第二句(x_set[1] += ewdt);把两个速度加起来,得到最好用于估算位置的最终速度,整个过程是不是就是,和姿态的互补滤波一毛一样.
参考一下姿态里的陀螺仪(姿态估计程序里)

这段之前写的不太对请乎略)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)